中间位置转向性能主客观评价
2024-07-05 11:02:02陈俊燊刘明石孙跃辉赖富刚张绍海
时代汽车 2024年9期
陈俊燊 刘明石 孙跃辉 赖富刚 张绍海
摘 要:转向性能是保证车辆正常行驶的三大性能(加速、制动和转向)之一,一台车好不好开和转向性能的好坏有直接的关系。转向性能既有主观评价指标,也有客观测试指标,如何将这两者之间的关系连接起来是一个比较难的问题。目前大部分厂家将转向性能分为直线行驶性能、弯道行驶性能和转向干扰等几个方面。而客观测试指标有转向力、转向灵敏度、力矩梯度、转向力矩死区等指标。本文旨在提出转向直行行驶性能中主观评价指标和客观测试指标不仅仅是看高速行驶时的状态,更应该关注到各车速下的性能表现以及随车速的变化关系。
关键词:客观评价 主观评价 中间位置 转向响应 转向力 力矩梯度 转向灵敏度
0 引言
几乎所有主机厂在整车开发过程中都会进行中间位置转向试验,但绝大部分厂家在进行中间位置转向试验时采用的车速为100km/h和120km/h两个车速。而鲜有关注较低车速时的中间位置转向性能,以及随车速变化时转向性能的变化。大部分家用轿车及城市SUV对于转向的要求是低速轻便,高速沉稳,所以转向力矩梯度会随着车速的增加也越来越大。目前绝大部分家用车型还是采用的定转向传动比转向系统,所以随车速的增加,转向的响应也会越来越灵敏。力是转向系统给人的最直观反馈,你可能不知道打了多少度的方向盘转角,但你一定能感受到对方向盘施加了多大的力,所以在中低速行驶时,力矩斜率尽可能保持一致,以便驾驶员能通过力矩的反馈清晰辨析车辆的响应状态,但在高速行驶时,需要保证车辆的稳定感受,往往会把力矩斜率稍微调大一点以保证稳定感受,这样驾驶员就能在高车速时感受到车辆更加沉稳。变道力矩指的是驾驶员正常行驶变换一个车道时对应的方向盘力矩,该转向力也应该随车速增加而增加,这样才能在车速越来越快的情况下给驾驶员足够的信心感。
1 主客观测试方法
若采用普通力矩方向盘,在进行客观测试的同时也能进行主观评价,若采用操稳机器人进行测试,则需拆除设备后按照客观测试方法单独进行主观评价。
客观测试必须采集车速、横摆角速度、侧向加速度、方向盘转角、方向盘转角速率、方向盘转矩。需要使用陀螺仪采集横摆角速度和侧向加速度,使用转向机器人或者测力方向盘采集方向盘转角、方向盘转角速率和方向盘转矩。主观评价是多位专业评价工程师的综合结论。
测试的车速为25km/h、50 km/h、80 km/h、100 km/h和120 km/h,当然测试车速也可以分布的更加均匀且范围还可以加大。
1.1 名词解释
本文提及了较多的指标名词,先做一个介绍说明。
1.1.1 中间位置响应
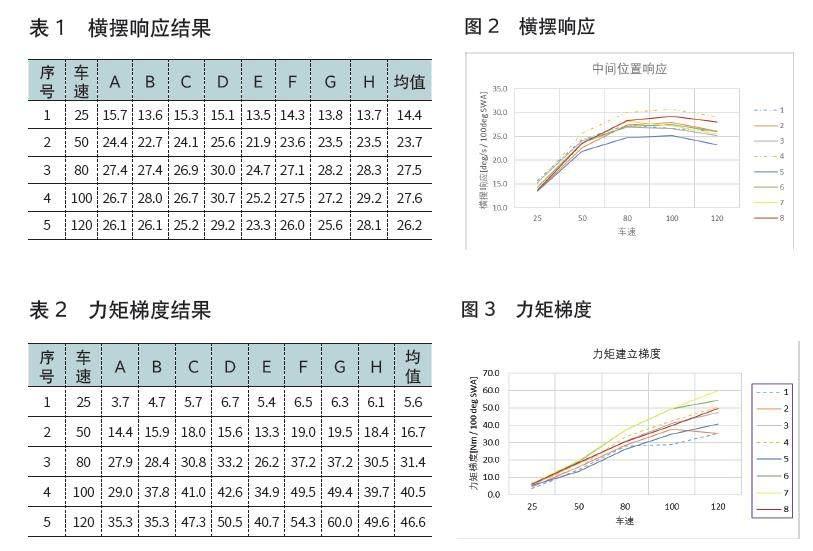
各车速下的横摆角速度响应,也可简称横摆响应,是指每100°方向盘转角时横摆角速度与车速的变化关系,主观感受到车辆围绕Z轴旋转角速度随方向盘转角的变化。
1.1.2 力矩建立梯度
力矩梯度是指每100°方向盘转角时方向盘力矩大小,主观感受方向盘力矩随方向盘转角的变化。尽量保证随力矩梯度随车速线性变化,如果力矩梯度变化不线性,主观感受车速变化时方向盘力矩会有突变。
1.1.3 力矩死区
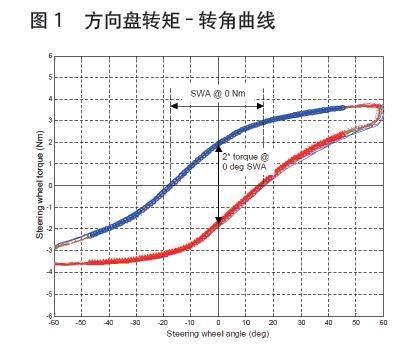
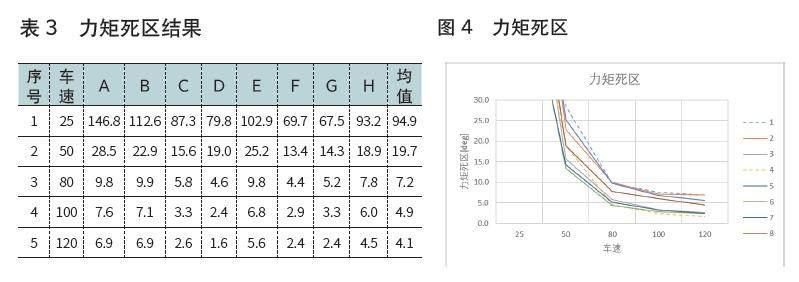
方向盘转矩-转角曲线上,方向盘转矩为零时对应的方向盘转角范围(图1)。主观感受方向盘力矩过零时转角范围的大小,即中间位置转向时方向盘力所对应的空行程。力矩死区越大导致驾驶员主观感觉方向盘越松旷,而力矩死区过小又会感觉方向盘夹得过紧,不容易调整。
1.1.4 力矩斜率
每1g侧向加速度响应所对应的方向盘力矩大小。主观感受车辆侧向加速响应所对应的方向盘力矩大小。
1.1.5 摩擦阻尼
侧向加速度为零时所对应的方向盘力矩大小,主观感受车辆有侧向加速度响应时方向盘力矩的大小,表示车辆维持本车道直线行驶时微调方向盘时需要的方向盘力矩大小,摩擦阻尼越大维持直线行驶越费力,而摩擦阻尼过小,会感觉车辆发飘。
1.1.6 变道力矩
侧向加速为0.15g所对应的方向盘力矩,主观感受在超车变换车道时所需的方向盘力矩大小。变道力矩越大,超车变道时越费劲,而变道力矩小又会导致车辆的不稳定感。
1.1.7 转向灵敏度
每100°方向盘转角所对应的侧向加速度值,与转向系统的转动比关系密切,转向灵敏度为中间位置转向灵敏度的平均值。主观感受侧向加速度随方向盘转角输入的响应。转向灵敏度随车速增加会越来越快。
1.2 测试方法
按照上文所述的车速匀速行驶,方向盘转角以0.2Hz的频率输入,转角的幅值大小保证车辆的最大侧向加速度为0.2g,方向盘转角连续输入两个周期,前半个周期和后半个周期数据无效,重复5组数据,并对五组数据做多项式曲线拟合。计算出各车速下的以上数据指标。
2 客观测试结果
按照上文所述的测试方法,对市面在售的8款销量较好的SUV车型进行了客观测试,并用Matlab对数据进行处理,得出以下数据指标。
2.1 中间位置响应(表1、图2)
2.2 力矩建立梯度(表2、图3)
2.3 力矩死区(表3、图4)
2.4 力矩斜率(表4、图5)
2.5 摩擦阻尼(表5、图6)
2.6 变道力矩(表6、图7)
2.7 转向灵敏度(表7、图8)
3 结语
E车转向传动比稍大一点,横摆响应和转向灵敏度都会偏小一点。B车和H车转向传动比稍小一点,横摆响应和转向灵敏度都偏大一点。B车高速行驶时横摆响应和转向灵敏度下降过多,变化不线性,高速行驶灵敏度变差。B车和F车高速行驶转向力矩梯度增加不线性,高速行驶力不够直接。尤其是B车,在车速120km/h行驶时的变道转向力比车速100km/h行驶时变轻,这个点是异常情况。A车80km/h行驶的变道转向力最大,随车速增加也有轻微变弱,这种感觉就失去了车速越高车辆应越沉稳的逻辑表现。A车、B车、E车、H车中间位置显得稍空,力矩死区稍偏大。H车高速行驶时力增加过多,稍显笨重。
参考文献:
[1] 郭孔辉,宗长富.汽车操纵稳定性的主观评价[J].汽车工程,2000.
[2] Norman K. Objective Evaluation of On-Center Handling Performance[C]. SAE Paper, No. 840069.
[3] 余志生.汽车理论(第五版)[M].北京:机械工业出版社,2009.
[4]胡晓冬,董辰辉.MATLAB从入门到精通[M].北京:人民邮电出版社,2010.