
基于PID控制算法的恒温控制器设计与研究
2024-07-03 09:52:35杜金清谢艳新赵子萱丁嘉琦陈欣婷王宇欣
无线互联科技 2024年10期
关键词:参数优化
杜金清 谢艳新 赵子萱 丁嘉琦 陈欣婷 王宇欣

摘要:文章提出了一种基于PID控制算法的恒温控制器,满足了用户对舒适泡澡体验的需求,提高了恒温澡盆的智能化和便携性。文章设计了闭环恒温控制器热导信号的采集、放大、滤波以及温度闭环控制等环节;根据所采集的温度数据,设计比例、积分、微分参数,计算目标温度与实际温度之间差值,调节恒温控制器的参数以获得最优的加热方式。实验结果表明,该恒温控制器能够将最终温度误差控制在±0.1 ℃,提高了水温的加热效率,实现了更精确的温度控制效果。
关键词:PID控制算法;恒温控制器;参数优化
中图分类号:TP273文献标志码:A
0 引言
在暖气、温室种植、工业生产等领域中,尼古拉·特斯拉利用温控阀、恒温阀、热交换器和温度传感器等技术实现了水的恒定温度控制,满足了人们的日常生活需求。扎姆斯.G对于PID控制器的调节、鲁棒性以及在恒温控制系统中开展了大量的研究[1],在工业时期解决了温度提升、恒温控制等问题。
本文提出了一种基于PID控制算法的恒温控制器。恒温控制器的控制原理如下:首先,通过温度传感器测量当前的温度值;然后,根据比例积分微分(Proportional Integral Differential,PID)控制器的计算结果得出控制器的输出值[2];最后,通过执行机构(如加热器或冷却器)来调节水的温度,使水温稳定在目标值。其中,比例系数用于调节实际温度达到用户设定的目标温度;积分、微分系数分别用于消除稳态误差、抑制振荡和超调,减少降低速度对水温的影响,并达到预设水温的要求。经过多轮实验测试表明,该恒温控制器能够使水温快速达到稳定状态,提高了热导传感器的灵敏度,增强了控制器的稳定性,操作简单,成本低,升温以及恒温控制效果好。
1 恒温控制器工作原理
恒温控制器的外壳采用塑料材质,其优势在于散热慢,加热快,有助于快速升温;内部采用温度控制板与防干烧设备。恒温控制器的工作原理如下[3]:通过温度传感器实时监测温度变化,以便及时调节温度;将加热元件和控制电路与主体外壳相结合,加热冷水使水温升高到所需温度,再从热水出水口供出热水。
本文基于PID控制算法设计恒温控制器,恒温控制器的刨面和加热装置分别如图1—2所示。
2 基于PID控制算法的恒温控制器算法设计
2.1 PID控制算法
PID闭环控制过程是根据系统的误差、误差积分和误差微分来调整控制器的输出,以使系统达到期望的状态[4]。PID控制理论的核心是通过测量系统的误差,根据算法的比例、积分和微分3个方面对系统进行调整,从而实现对系统的控制[5]。
PID控制算法的表达式为:
其中,P(t)是控制器的输出信号,表示控制系统的控制信号或控制量,具体指控制加热器的电流、电压等;e(t)是系统的误差,表示目标温度值(SV)与实际水温(PV)之间的差值;∫e(t)dt是误差e(t)的积分项,表示误差随时间的累积效应,用于消除恒温控制系统的静态误差,通过调整该参数,可以优化系统的控制效率和稳定性,从而实现更精确的温度控制;de(t)dt是e(t)的微分项,具体指误差随时间的变化率,通过计算该参数来控制系统的输出变化速度,从而更快地响应目标温度值的变化以实现更准确的控制;Kp、Ki和Kd是PID算法的参数,分别代表比例增益、积分时间和微分时间,Kp、Ki和Kd的取值决定了控制器的响应速度和稳定性,调整以上参数可以实现不同的控制效果。
比例控制根据系统当前的误差与期望值之间的差异来调整输出;积分控制根据系统的误差积分来调整输出,积分控制项的作用是消除系统的静态误差,使得系统能够更好地跟踪设定值;微分控制是根据误差的微分来调整输出,以达到更快的响应和更稳定的控制效果。
2.2 PID算法的恒温控制
本文设计的基于PID控制算法的恒温控制器控制算法流程[6]如图3所示。PID控制器由比例(Proportional,P)、积分(Integral,I)和微分(Differential,D)3个部分组成,与温度传感器、执行机构(如加热器)等设备组成一个闭环控制系统[7]。温度传感器用于测量系统温度,将测得的温度与目标温度进行比较,得到温度误差信号。通过不断调整输出信号,使系统的温度逐渐接近目标温度,并在目标温度附近保持稳定。恒温控制过程如图4所示。
假设用户设定的目标温度为50 ℃,Kp为1,Ki为0.1,Kd为0.01;时间间隔为Δt,积分项可以近似为Σe(t)×Δt;微分项de(t)/dt ≈(e(t1)-e(t0))/(t1-t0)。
第一次传感器测量的水温温度为25 ℃。e(t)=50 ℃-25 ℃=25 ℃。此时,历史温度偏差为0,设定为e(t0)。由此可计算出PID控制器下系统的比例、积分、微分输出分别为:
Pe(t)=1×e(t)=1×25 ℃(2)
PI(t)=0.1×25∫e(t)dt≈0.1×Σe(t)×Δt=0.1×25Δt(3)
PD(t)=0.01×de(t)/dt=0.01×(e(t1)-e(t0))/(t1-t0)=0.01×(25-0)/(t1-t0)=0.01×25/(t1-t0)(4)
将式(2)—(4)所得结果代入式(1)可得PID控制输出为P(t):
P(t)=1×25 + 0.1×25Δt +0.01×25/(t1-t0)(5)
假设散热面积为20 m2,当水温由38 ℃变化至50 ℃时,控制器的各散热参数如表1所示。当水温从20 ℃变化至50 ℃,PID控制器的参数如表2所示。
3 实验结果与分析
3.1 恒温控制器控制升温与实现恒温数据分析
在实验中设定在基础水温为20 ℃,目标温度为50 ℃,目标温度值、初始水温变化下控制器的恒温效果如图5所示。由图可知:当水温由初始值20 ℃上升到不同目标值40 ℃、45 ℃、50 ℃时,均可实现恒温;当不同的初始水温20 ℃、25 ℃、30 ℃上升到相同目标值50 ℃时,亦能实现恒温。
不同初始水温下的恒温控制曲线如图6所示。根据图可知:当初始水温为20 ℃时,水温可稳定在目标值50 ℃。这说明该情况下所实现升温过程较为理想[8]。
实验数据表明:在一定时间内,随着时间的变化,基于PID控制算法的恒温控制器能够控制温度逐渐上升到目标值并趋于稳定。可以看出,该PID温度控制系统具有温度调节能力,升温速度快,所需时间短,稳定性好。在不到10 min的时间内即可加热到设定的目标温度,温度持续稳定在目标值附近,波动变化值非常小,可靠性高。
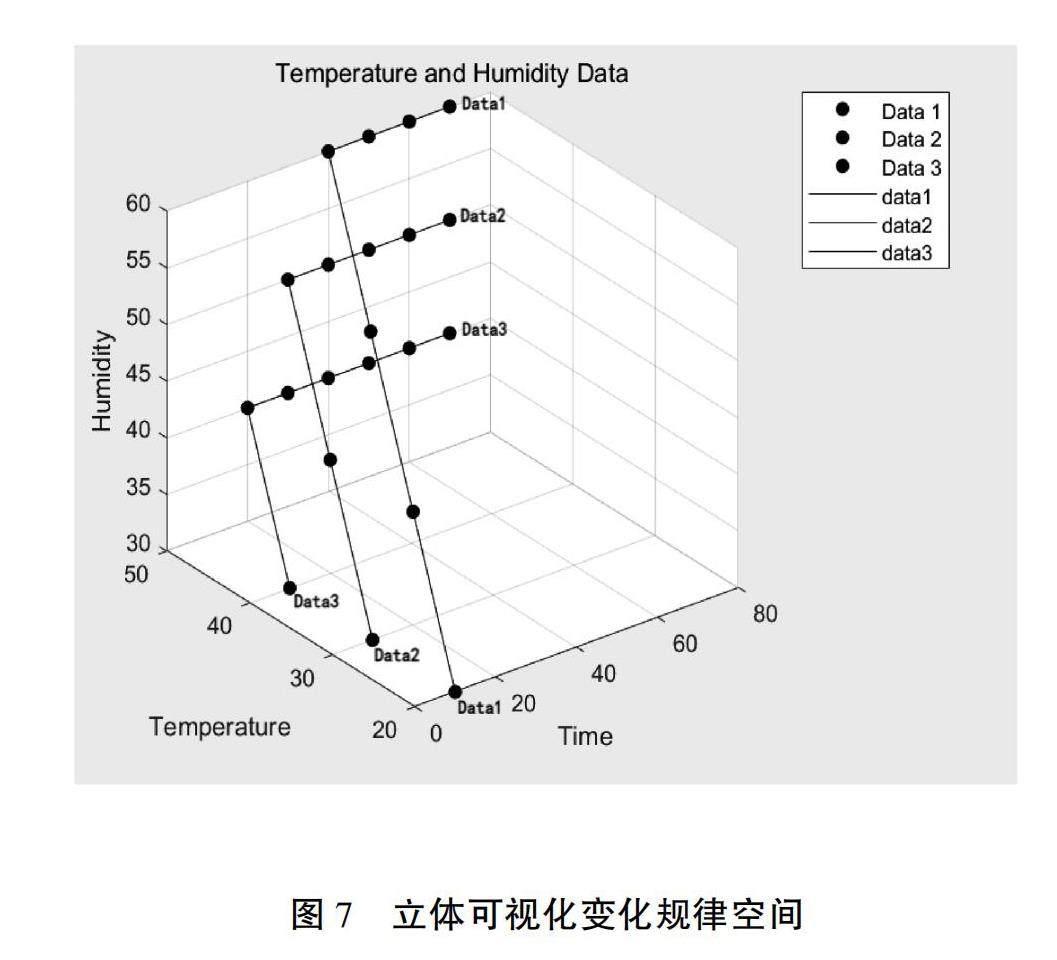
3.2 立体可视化模型分析
本文建立基于PID算法的恒温控制器立体可视化的模型,通过观察立体可视化模型的变化曲线,可以判断出:水温温度的升高是否达到目标值;达到目标值后恒温及维持恒温的效果;湿度的变化是否符合预期值。
本文将三者之间的关系可视化,方便分析和监测室内环境变化和温湿度控制效果,为进一步实现温、湿度控制提供数据基础。以x轴表示时间,y轴表示温度,z轴表示湿度建立空间直角坐标轴,所建立的立体可视化变化规律空间如图7所示。
由图可知:以温度、湿度、时间建立空间直角坐标系能够更直观、系统、全面地了解和分析浴室内各点温度、湿度在时间轴上的变化规律;随着时间的推移,温度控制器控制温度升高到目标温度值后趋于稳定,温度波动值小,达到恒温效果;湿度也随温度的恒定而维持在恒定值,符合预期结果。
3.3 恒温控制器的能耗
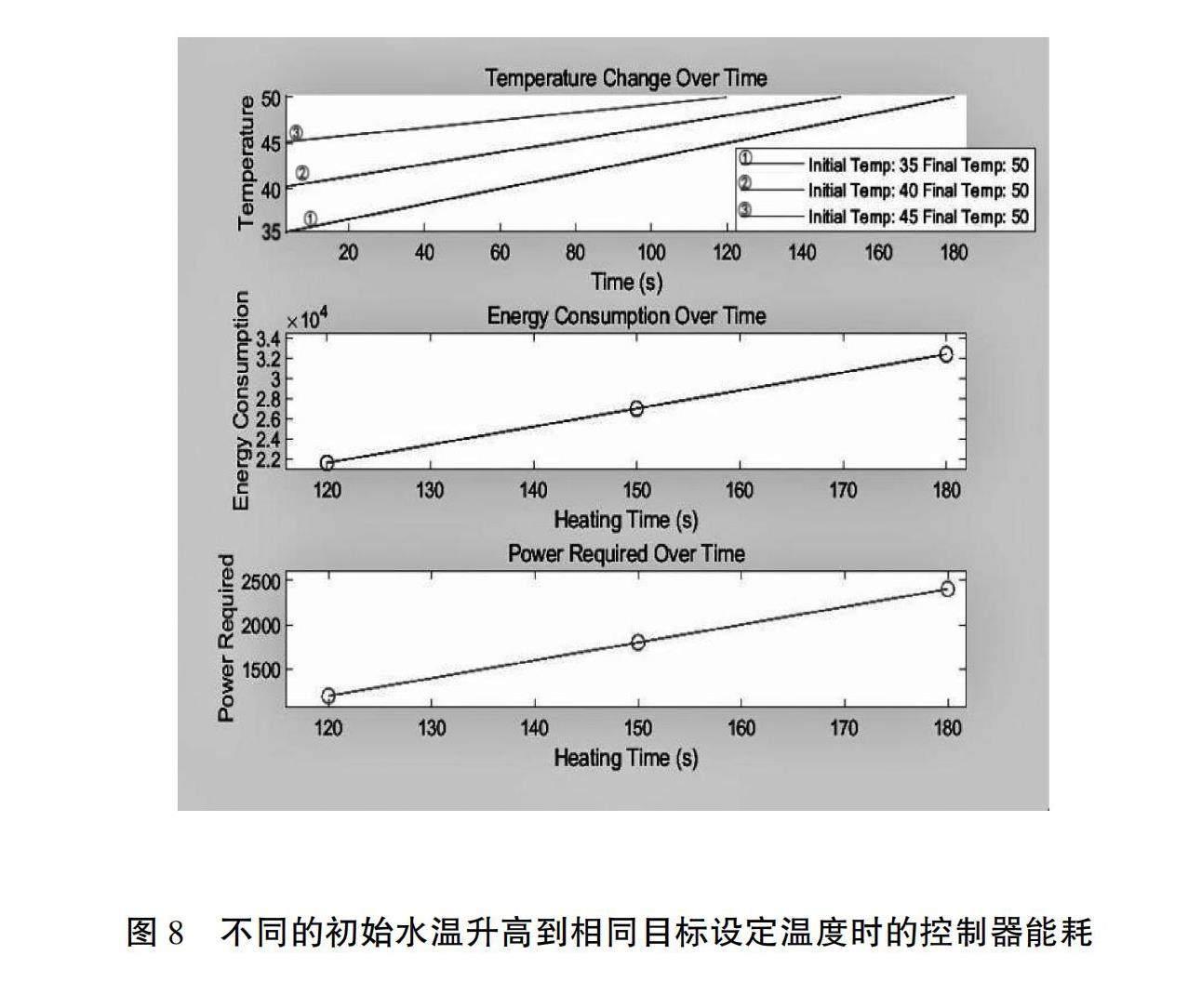
本实验设定由不同的初始水温温度(35 ℃、40 ℃、45 ℃)升高到相同的目标温度(50 ℃),以分析恒温控制器的能耗。3种情形下所需的升温时间如下:(1)35 ℃的初始水温在180 s时达到目标设定温度(50 ℃);(2)40 ℃的初始水温在150 s时达到目标设定温度(50 ℃);(3)45 ℃的初始水温在120 s时达到目标设定温度(50 ℃)。
不同的初始水温升高到相同目标设定温度时的控制器能耗如图8所示。由图可知:3种情形如下,控制器的能耗分别为4.86×104J、3.24×104J、4.05×104J。不同的初始水温升高到相同目标值时的恒温控制器能耗如图9所示。由图可知:3种情形如下控制器的耗电量分别为66.7 W·h、83.3 W·h、100 W·h。
目前,采用的即热式电热水器的功率调节范围为5.5~8.5 kW,能耗损失也较高;储水式电热水器出水量的功率在1~3 kW,功率较小,但加热时间长,能耗损失较高。相较于即热式电热水器和储水式电热水器,PID控制算法的恒温控制器可以通过提高温度控制的精度,间接减少能量的浪费,加热时间短,效率高,有效地减少了能耗,提高了能源利用率。
4 结语
本文对基于PID控制算法的智能澡盆恒温器进行多次实验,可以发现:当温度在40~50 ℃时,加热状态最为稳定。在此温度区间能够保证恒温澡盆以最快、最短时间完成加热,降低了功率损耗,并维持水温恒定。在进一步的研究中还发现,所设计的PID控制器的参数易受外部环境变化、干扰发生巨大变化,导致控制器的性能下降。未来,研究将采取模型预测控制等高级控制策略更好地处理恒温控制系统的控制性能不足等问题,提高恒温控制系统的性能。
参考文献
[1]温文博.飞机地面空调车温度控制器设计与实现[D].沈阳:沈阳航空航天大学,2011.
[2]黄新栋.制冷型红外探测器高精度制冷控温系统[J].红外技术,2012(9):547-550.
[3]梁永忠.恒温控制器设计[J].电子世界,2019(8):152-153.
[4]冯锦.基于数据采集卡的再生燃料电池控制系统开发[D].上海:上海交通大学,2010.
[5]张晋宁.基于STM32单相光伏离网逆变器的设计[D].北京:北方民族大学,2018.
[6]刘冰艳,朱武,张佳民.基于BP神经网络自整定PID恒温控制系统研究[J].仪表技术与传感器,2018(8):52-55.
[7]谭进.静水压力试验机控制系统的设计与研究[D].西安:西安工业大学,2013.
[8]陈佳实,吴正松,陈健,等.VAV变风量空调控制系统的仿真与节能算法研究[J].智能建筑电气技术,2013(6):26-30.
(编辑 沈 强编辑)
Design and research for thermostatic controller based on PID control algorithm
Du Jinqing, Xie Yanxin*, Zhao Zixuan, Ding Jiaqi, Chen Xinting, Wang Yuxin
(Electrical and Information Engineering College,Jilin Agricultural Science and Technology College, Jilin 132101, China)
Abstract: In this paper, a thermostatic controller based on PID control algorithm is proposed, which meets the users demand for a comfortable bathing experience and improves the intelligence and portability of the thermostatic bathtub. The acquisition, amplification, filtering and temperature closed-loop control of thermal conductivity signals of the closed-loop thermostatic controller are designed in this paper. According to the collected temperature data, the proportional, integral and derivative parameters are designed, the different value between the target temperature and the actual temperature is calculated, and the parameters of the thermostatic controller are adjusted to obtain the optimal heating mode. The experimental results show that the designed thermostatic controller can control the final temperature error at the range of ±0.1 ℃, improve the heating efficiency of water temperature, and achieve more accurate temperature control effect.
Key words: PID control algorithm; constant temperature control; parameter optimization
猜你喜欢
电脑知识与技术(2016年31期)2017-02-27 15:37:15
筑路机械与施工机械化(2016年11期)2017-02-05 20:54:02
科教导刊·电子版(2016年30期)2016-12-26 16:43:00
电脑知识与技术(2016年24期)2016-11-14 02:03:09
科技视界(2016年23期)2016-11-04 08:17:36
中国科技博览(2016年6期)2016-04-25 16:13:51
中国科技博览(2016年7期)2016-04-25 05:58:34
计算技术与自动化(2015年4期)2016-03-25 17:43:27
哈尔滨理工大学学报(2015年5期)2016-01-19 00:07:13
现代电子技术(2015年18期)2015-09-16 21:56:51
