基于无人机激光雷达的地表变形监测研究
2024-07-01 15:27:12江吉平
科技资讯 2024年8期
江吉平

摘要:旨主要探讨了M2M、C2M、P2P这3种传统点云面域沉降监测的原理及其优缺点,并详细阐述了顾及最优步长的垂直形变监测算法的原理和流程;在不同点云密度下,开展了网格步长和非地面点对3种方法垂直变形监测精度影响的研究;当点云密度为5时,进行不同方法点云监测精度的对比分析;最后利用顾及最优步长的垂直形变监测算法对矿区垂直形变进行了计算。
关键词:沉降监测 LiDAR点云 正射影像 网格步长
中图分类号:P237;TD325
Research on Surface Deformation Monitoring Based on the UAV Lidar
JIANG Jiping
Dongguan First Branch, Guangzhou Siwei Chengke Information Engineering Co., Ltd., Guangzhou, Guangdong Province, 523040 China
Abstract: This article mainly explores the principles of the three traditional point cloud region settlement monitoring methods of M2M, C2M and P2P and their advantages and disadvantages, and elaborates on the principle and process of the vertical deformation monitoring algorithm that considers the optimal step size. It studies the influence of the grid step size and non-ground points on the vertical deformation monitoring accuracy of the three methods under different point cloud densities, compares and analyzes the point cloud monitoring accuracy of different methods when the point cloud density is 5, and finally uses the vertical deformation monitoring algorithm that considers the optimal step size to calculate the vertical deformation of the mining area.
Key Words: Settlement monitoring; LiDAR point cloud; Orthoimage; Grid spacing
开展矿区地表沉降监测能够及时发现矿区安全隐患,对保护矿区周边人民安全、保障矿区安全生产以及预警矿区地质灾害具有重要意义[1]。InSAR技术对矿区的微小变形监测精度较高,但在实际应用中受地形、植被和失相干等限制,其大范围监测能力难以有效施展。摄影测量影像具有丰富的纹理信息,可以用于变形前后的影像配准,被广泛用于矿区变形监测,但该技术无法穿透地表植被获取真实地表信息,其监测精度在植被茂密的区域受到限制。
基于激光雷达点云的矿区地表垂直变形监测方法主要是计算两期激光雷达点云在同一位置的高程差异。但是点云数据获取的地面点较为随机,难以保证两期点云可以获取到完全同一位置的高程信息。为了实现基于点云数据的地表垂直变形监测,目前主要有M2M、P2P、C2M的计算方式[2]。这3种方法中仅有M2M方法在计算变形时直接利用网格法DEM作差得到变形结果,但其他两种方法在最终进行变形结果重采样插值计算时,同样采用了网格插值的方法。而网格步长大小的设置会影像最终形变计算的精度。因此,本文提出顾及最优网格步长的矿区垂直变形监测方法,并基于此对矿区垂直形变进行监测。
1 研究区域与数据处理
研究区域所在村位于广东省某镇,村址占地面积约为420亩,现居住人口约为870人。本次选择该村内矿山一工作面作为研究区。工作面开采工作时间为2021年11月到2022年8月,采深区间750~820 m,采厚3.5 m,开采倾角17°、走向长度1 134 m,倾向长度157 m,本研究主要选用搭载于大疆M300无人机平台的蜂鸟Genius激光雷达和赛尔102S影像镜头来分别获取点云和影像数据。为了评估监测精度,利用地面站点进行实时数据的获取,后文中并以此监测结果与无人机设备监测结果进行比对。其中第一期数据获取时间为2022年1月20日,而第二期数据为2023年6月8日。
1.1 LiDAR和影像点云融合
将正射影像和点云滤波结果进行融合,得到研究区高精度彩色点云。具体彩色点云融合步骤如下:(1)导入正射影像,选择合适的坐标系和参考基准面;(2)导入点云LAS文件,并选择坐标系和参考面;(3)融合生成彩色点云。
1.2 彩色点云精度评价
由于后续中需要使用彩色点云进行变形监测,因此需要利用控制点结果对点云进行精度评定。具体精度评定方法是在点云中利用最近邻搜索算法搜索控制点最近的点,并计算对应坐标差[3]。通过对比GCP(Ground Control Point)数据可知,最大高程误差为13.8 cm,最高高程误差仅为4.7 cm。平均误差约为9.8 cm。
2 顾及最优网格步长的垂直变形监测方法
传统点云面域沉降监测方法主要有M2M、P2P、C2M这3种方法。M2M是指利用两期点云分别生成两期数字高程模型(Digital Elevation Model,DEM)模型,通过对比两期DEM的高程变化,最终得到面域的垂直变形。P2P方法是指利用K近邻点搜索(K-Nearest Neighbor,KNN)两期点云中的最近邻点对,然后对比点云对的高程值变化,最终得到垂直向的变形值。C2M方法是指将第一期点云进行曲面模型重建,然后计算第二期点云中单点到模型的距离,并以此距离为变形值。
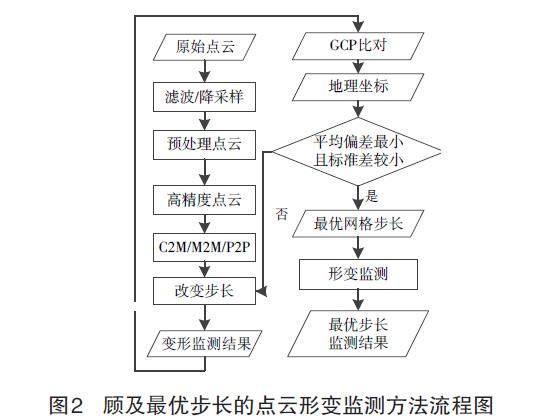
(1)首先对点云进行降采样,获取不同密度的点云,然后对矿区点云进行非地面点滤波,获取去除地面点前后的矿区点云。
(2)分别对不同密度下的去除地面点前后的矿区点云进行精度分析,以获取较高精度的点云。
(3)基于(2)中的高精度点云,并分别改变网格步长,计算不同步长下的C2M、M2M和P2P这3种垂直形变监测的结果。
(4)将(3)中的监测结果与GCP实测数据进行比对,计算监测偏差;监测结果与GCP实测数据比对一般使用K最近搜索的方法。
(5)为寻求获取不同网格步长和垂直形变监测方法之间的关系,并获取最优步长,需要对(4)中的偏差结果进行精度分析;具体过程为首先对控制点的数据进行逐点分析,对于其中部分因为外界因素导致的较大误差的结果进行剔除[4]。为了统一偏差的结果,首先对偏差取绝对值,然后分别计算其偏差绝对值的平均值和标准差,并将其进行误差棒分析,并绘制折线图用以分析监测精度和网格步长的关系。利用上述步骤对所有监测结果的误差棒分析,若某网格步长监测结果的偏差平均值为最小且标准差波动情况也较小,该步长即为最优步长[5]。
(6)根据最优步长结果对矿区进行形变监测。通过上述所有步骤的分析,找到高精度方法和网格步长,并基于此提出顾及最优步长的矿区垂直形变监测方法。并基于此方法对矿区进行垂直形变监测,对矿区工作面区域的变形情况进行分析。
3 LiDAR点云与影像点云垂直变形监测精度对比
本次实验时在采集了无人机激光雷达点云数据的同时,也采集无人机正射影像数据。为了对比无人机影像生成的影像点云与LiDAR点云沉降监测精度,采用和上文中相同的方法对去除非地面点后的LiDAR点云和影像点云进行了对比分析。
通过对比分析可以发现3种方法监测结果LiDAR点云监测结果比无人机影像点云监测结果精度高约20 cm;其中影像点云监测结果误差在30~35 cm之间。造成误差较大的原因可能在于影像点云是基于相片和POS数据生成的,由于影像采集时植被等因素的遮挡,无法获取正确的地表形态,导致后续非地面点分类时,无法将农作物等地物生成的影像点云进行去除,最终导致了较大的监测误差的产生。对于LiDAR点云,由于LiDAR设备对稀疏的植被有一定的穿透性[6],在地面点去除时,地面点去除效果相对于影像点云较好,因此最终LiDAR点云有较高的监测精度。步长为3 m时,影像点云可以进行变形监测,而LiDAR点云较难进行检测,可能是由于影像点云在此区域无法正确去除非地面点。同时在2 m、4 m和8 m的网格步长下,LiDAR点云和影像点云都处于较高的误差水平。因此后续变形监测时应尽量避免使用这类步长。
4 顾及最优网格步长的矿区垂直变形监测结果
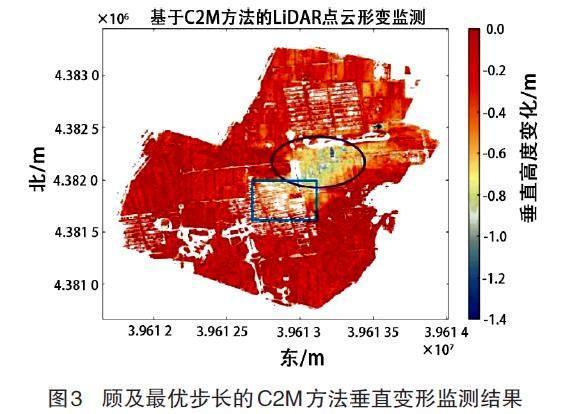
通过上述精度分析发现,3种形变监测方法的监测精度随着网格步长的增加整体上呈现出先减小,后增加,最后再减小的趋势,5 m网格步长下为最优网格步长。因此,进一步的利用最优网格步长和高精度监测方法对矿区进行垂直形变监测。图3和图4展示了基于最优网格步长下的C2M和M2M两种监测方法计算的矿区垂直变形结果。通过对比分析发现,在考虑最优网格步长情况下,C2M和M2M方法监测整体平均偏差约为6. 2cm;不考虑最优步长情况下,两者平均偏差为8.1 cm,即考虑最优步长监测精度提高了1.9 cm。
通过对图3和图4分析可知,在最优网格步长的情况下。在紫色椭圆内,即6—11月工作面区域为主要变形区域,其变形值达到了80~120 cm。在淡蓝色矩形,即1—6月工作面区域内,由于分离地面点导致该区域点较少,但是少量的点可以发现该区域变形在30~70 cm之间。在村庄外的区域变形基本较小,基本在10 cm之内。
5 结语
基于C2M和M2M方法和最优步长的监测结果整体平均偏差约为6.2 cm,对比非最优网格监测结果精度提升约1.9 cm,最终利用C2M和M2M方法在最佳网格下对矿区进行监测,在2022年2—8月工作面开采区域沉陷最大,约在80~120 cm之间,其次是村庄区域,形变约为30~70 cm。
参考文献
[1] 叶岩磊.基于激光点云的边坡变形监测与危岩体识别研究[D].南京:南京信息工程大学,2023.
[2] 孙贝贝,周葵,林永春.基于S-SAR的高海拔露天矿边坡变形监测与影响因素研究[J].中国安全生产科学技术,2023,19(S1):79-85.
[3] 吴德军.采动耕地三维变形无人机监测方法及应用研究[D].北京:中国矿业大学(北京),2023.
[4] 隋腾飞,黄建伟,余敏.基于近景摄影测量的高精度基坑变形监测技术研究[J].合肥工业大学学报(自然科学版),2023,46(6):828-832.
[5] 赵甲涛.基于资源三号卫星影像的露天矿区地形变化检测[D].北京:中国矿业大学(北京),2023.
[6] 郭一兵,翟向华,姜鑫,等.SBAS-InSAR技术在特大型滑坡变形监测中的应用[J].地震工程学报,2023,45(3):642-650,672.