基于3D相机成像的公路护栏梁板中心高度快速检测技术研究
2024-06-17 10:55钱敬之范道英
交通科技与管理 2024年11期
钱敬之 范道英

收稿日期:2024-03-20
作者简介:钱敬之(1975—),男,本科,高级工程师,从事道路交通工程及沿线设施检测以及智能交通研究等工作。
通信作者:范道英(1986—),女,本科,工程师,从事道路交通工程沿线设施检测及质量管理等工作。
摘要 中心高度是公路波形梁钢护栏的一个重要工程指标,无论是新建护栏还是运营期公路的波形梁钢护栏,均需对其中心高度进行检测。文章为实现对波形梁钢护栏中心高度的快速检测,基于3D相机成像技术开发了车载式的梁板中心高度快速检测系统,并就该检测系统与传统人工检测的结果进行对比,同时就该系统在工程实际中的应用效果进行了分析,以期为公路波形梁钢护栏中心高度检测提供新的思路。
关键词 波形梁钢护栏;中心高度;3D相机;检测
中图分类号 U418.7文献标识码 A文章编号 2096-8949(2024)11-0067-04
0 引言
护栏作为公路的重要附属设施,其在保障道路交通安全方面发挥着至关重要的作用,截至目前,我国公路总里程逾5 350 000 km,随着新建公路及运营公路里程的不断增加,作为交通安全设施重要组成部分的公路护栏里程也在不断增加。公路护栏中波形梁钢护栏因防撞性能良好,在各等级公路中均得到了广泛的应用,尤其是在高等级公路中,大都采用波形梁钢护栏。
波形梁钢护栏具有引导行车人员视线、防止车辆冲出路面、保护车辆及司乘人员等功能,但其功能的正常发挥是以安装养护到位为基础的,而在波形梁钢护栏的各项技术参数中,梁板中心高度值是一个非常重要的指标,在各阶段针对护栏的检测中都需要对其进行现场检测[1]。但当前的检测方式效率较为低下,严重依赖于人工操作,因此该文提出了一种基于3D相机成像的公路波形梁钢护栏梁板中心高度快速检测技术。
1 公路波形梁钢护栏分类及其技术要求
当前在公路工程中所应用的波形梁钢护栏分为两波形梁板钢护栏和三波形梁板钢护栏,针对不同类型的波形梁钢护栏,相关规范中对其梁板中心高度的要求也有所不同。在《公路交通安全设施设计细则》(JTG/T D81—2017)中规定了两波形梁板中心高度为600 mm,三波形梁板中心的高度为697 mm,该规范从设计的角度对不同类型波形梁钢护栏梁板的中心高度作出了规定,为波形梁钢护栏的设计以及施工提供了明确的依据[2]。在工程实践中,对于新建公路,可能由于施工因素导致梁板中心的高度无法满足规范要求,而对于运营期的公路,则可能由于车辆碰撞、自然环境、人为破坏等因素使得梁板中心高度发生变化,所以无论是在公路的交竣工阶段还是运营期,都需要对护栏梁板中心高度进行检测,以确保其满足规范的要求。
2 波形梁钢护栏梁板中心高度检测方法概述
2.1 尺量检测
根据《公路工程质量检验评定标准 第一册 土建工程》(JTG F80/1—2017)规定,波形梁钢护栏横梁中心高度允许偏差为±20 mm,其中所规定的检测方法为尺量,每1 km每侧测5处[3]。该抽检方式采样间距达到200 m,往往无法真实表征梁板中心高度的实际情况,同时采样点的选择对于最终的检测结果也有较大的影响。采用尺量检测的方式针对里程较长的护栏,所需要的检测时间也会大幅增加,尤其是对于高速公路,在检测过程中由于需要保证现场检测人员的人身安全,往往需要封闭交通进行[4]。
2.2 基于线结构光扫描的测量技术
在白佳迪[5]的研究中,其通过巡检机器人载运平台,基于结构光视觉传感器所采集的图像,并通过设计相应的算法对所采集的图像进行处理,然后结合系统标定结果进行护栏中心高度的解算。但是在其研究中,整个巡检机器人载运平台与护栏之间的距离需要保持恒定,在通过计算机对梁板中心高度进行计算的过程中,需要依赖于载运平台的高度保持相对恒定。该检测方式的检测效率相较于尺量检测有了大幅提升,但是其巡检机器人需要与护栏之间建立连接以使得二者之间的距离在检测过程中保持稳定,同时在检测的过程中,由于所采用的是小型机器人,往往也不适用于全路段的检测。此外,在梁板中心高度解算方面,其算法相对复杂,而在实际的检测过程中,周边环境、护栏自身状况都会对最终的计算结果造成影响。因此,该检测技术在工程实践中的应用仍然受限。
3 基于3D相机成像的公路波形梁钢护栏梁板中心高度快速检测系统
3.1 基于3D相机成像的测量原理分析
3D相机中的激光发生器所发出的激光被投射到待测物体表面时,在待测物体的表面会形成激光条纹,而激光经过物体表面的漫反射或反射又会被3D相机的CMOS传感器捕捉,此时激光发生器、待测物体的表面以及图像传感器在空间上就会形成一定的三角几何关系,而CMOS传感器所捕捉的激光条纹图像则包含了被测物体的三维信息,CMOS图像传感器中的成像点对于基准点的位移距离与被测物体表面相对于基准面高度之间的关系如式(1)所示,再通过建立合适的数学模型,即可实现对待测物体表面三维信息的提取,从而实现对于待测物的测量[6]。
(1)
式中,x——相机镜头成像的物距;d——像距;x'——CMOS图像传感器上像点移动的距离。
3.2 梁板中心高度快速检测系统的硬件组成
该文基于线激光3D成像原理设计了针对公路波形梁钢护栏梁板中心高度检测的系统,该系统硬件部分包括检测车辆、线激光3D相机、支架、吸盘、观测相机、距离传感器、PLC、电脑,其中线激光3D相机、观测相机通过支架和吸盘安装在检测车辆之上,线激光3D相机用于投射线激光到待检测护栏的表面并在表面形成激光轮廓线,而3D相机中的CMOS图像传感器则会对护栏表面的激光轮廓线信息进行捕捉和收集,这些激光轮廓数据进一步传输至电脑上,经过配套软件的处理即可获得护栏激光轮廓的坐标信息。同时,线激光3D相机所发出的线激光还会进一步投射到地面以及路缘石上,与投射到护栏表面的线激光相同,投射到地面以及路缘石上的激光轮廓线信息也会被记录和传输。观测相机则用于拍摄护栏以及周边环境的实景照片,并且距离传感器触发观测相机和线激光3D相机同步采样,从而保证二者所对应的公路里程桩号一致。
3.3 梁板中心高度快速检测系统的软件
为实现对线激光3D相机所获得的护栏梁板、地面及路缘石激光轮廓信息的处理,该文还开发了与硬件相配套的软件。线激光3D相机和观测相机所采集的图像和信息通过网络被发送到电脑的配套软件之中,配套软件包括数据处理界面程序和AI分类程序,其中数据处理界面程序用以加载原始数据、处理数据、导出数据和修改参数,AI分类程序用于识别护栏波形梁板的类型。其中,AI分类程序在视觉算法上结合了传统视觉算法与深度学习视觉算法,传统视觉算法部分负责对护栏激光轮廓图像进行预处理,去除特异的杂点,进行模板匹配,即进行梁板和路缘石的匹配、计算;深度学习视觉算法部分则用于对护栏梁板进行分类,深度学习视觉算法使用ResNet50网络进行训练,同时使用TensorRT的16位推理引擎进行推理,进而可以经过分析得到护栏梁板的类型为两波形或三波形。
4 梁板中心高度快速检测系统检测结果分析
4.1 护栏梁板中心高度检测流程
该梁板中心高度快速检测系统的硬件与软件协同工作,其工作的主要流程:检测车辆搭载线激光3D相机、观测相机等在车道上正常行驶,检测车辆开始行驶后,即带动距离传感器开始工作,距离传感器向PLC发送信号,PLC进一步向电脑发送信号,电脑控制线激光3D相机采集护栏、路面及路缘石激光轮廓数据,并控制观测相机采集护栏、路面及路缘石的观测图像。然后电脑对采集的激光轮廓数据和观测图像进行保存。通过线激光3D相机和观测相机获得激光轮廓数据和观测图像之后,再通过配套软件对数据进行处理。配套软件分析处理数据的具体流程:首先读取本地的激光轮廓数据,并且AI分类程序构建一幅护栏轮廓的剖面图,然后再由AI分类程序进行图像预处理,去除激光轮廓图像中的杂点,再将靠近线激光3D相机一侧的路面激光轮廓线作为路面基准线,进行图像旋转,同时AI分类程序根据波形梁梁板和路缘石的模板文件,进行模板匹配,找到对应部位的图像位置,将对应部位的图像截取下来,利用深度学习分类网络,将波形梁图像划分为两波形、三波形梁板,至此即可完成对公路护栏梁板类型的划分。
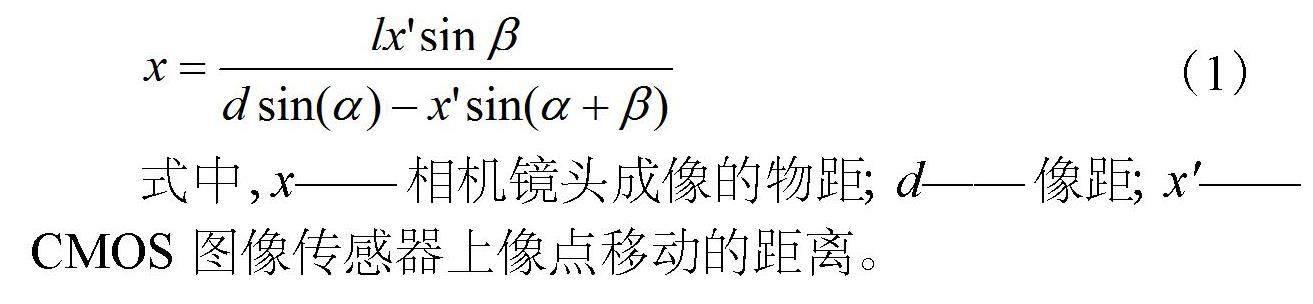
由于线激光3D相机所采集的护栏激光轮廓数据包含了各个点的空间坐标信息,利用AI分类程序可得到梁板上部和下部波峰A和B的坐标信息,如图1所示,AB所在直线与路面基准线的交点为O(x2, y2, z2),AB所构成的线段的中点为M(x1, y1, z1),如式(2)所示,M与O之间的欧式距离即为梁板的中心离地高度H1。同时,根据软件中所储存的路缘石模板,AI分类程序可以判断是否存在路缘石,如检测路段没有路缘石,则护栏梁板中心离地高度为梁板中心点与所述交点之间的欧式距离H1。
(2)
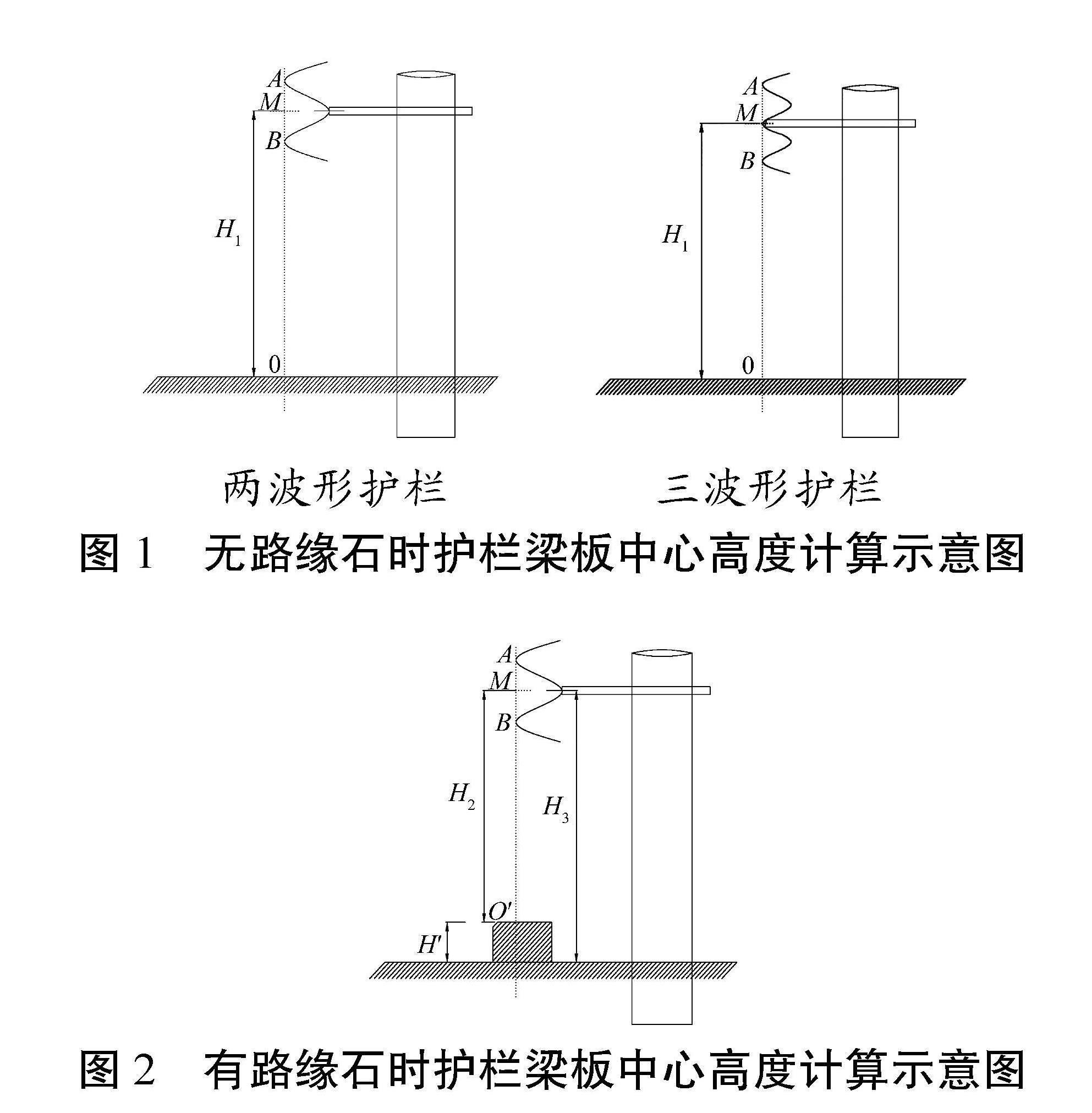
如果存在路缘石,将路缘石顶面激光轮廓线作为路缘石基准线,并进行图像旋转,如图2所示,AB所在直线与路缘石基准线所在直线的交点为O',M与O'之间的距离即为护栏梁板的中心离地高度H2,再通过对路缘石的激光轮廓信息进行分析即可得到路缘石高度H',如式(3)所示,此时护栏梁板的中心离地高度H2为梁板中心距离路面的距离H3减去路缘石的高度H'。该文之所以采用式(3)计算存在路缘石的情况下护栏梁板中心高度,是因为路缘石顶面宽度一般在100~150 mm之间,激光在路缘石上的投影长度相较于路面和护栏更短,实际所获取的路缘石顶面激光轮廓数据往往较为零散,故通过算法对零散的数据进行处理和拟合以得到路缘石顶面距离地面的距离。而由于地面和护栏激光轮廓数据较为完整,因此护栏梁板中心距离地面距离的计算结果误差较小,故采用式(3)的计算方式能够减少误差的传递。
H2=H3?H' (3)
4.2 检测结果分析
4.2.1 对比实验结果分析
为检测该文的梁板中心高度快速检测系统检测结果的精度,选取了100 m的测试路段,与传统尺量的检测结果进行对比。对于尺量检测,按照传统检测方式获得护栏梁板中心高度数据。对于车载式快速检测,首先启动计算机处理系统和横梁中心高度测量装置电源,打开控制系统软件,检查确认控制系统软件中各项功能和技术参数状态正常。然后在控制系统软件上输入待测路段信息,检测系统开始自动测量护栏横梁中心高度及实时记录对应桩号。在对比实验中,检测车辆分别以30 km/h、50 km/h、80 km/h速度行驶,以测试在不同速度下检测系统检测结果的稳定性,人工测试与快速检测系统检测结果对比情况如图3所示。从图3中不难发现,通过人工检测所获得的检测数据与利用梁板中心高度快速检测系统所测得的结果基本一致,由此表明快速检测系统的检测精度与人工检测基本相同,且快速检测系统的检测结果不受检测车辆行驶速度的影响,在80 km/h以内行驶能够获得相同的检测结果。
4.2.2 工程检测结果分析
为进一步了解该检测系统在长距离、复杂环境下的检测效果,选取了G4217蓉昌高速(成灌段)K11+137~
K31+137共计20 km路段进行现场检测,检测过程中,检测车辆以90~120 km/h的速度行驶,选取其中K23+840
~K25+000路段的检测数据进行分析,该段护栏中心高度检测结果如图4所示。通过对快速检测系统的检测结果进行分析,该路段均为两波形护栏,护栏梁板中心高度在600±20 mm范围内。如图5所示,为K23+544处的检测结果,不难发现此时观测相机所显示的现场情况为水泥护栏,同时相应的护栏高度检测结果也为0,此外,针对其他检测结果为0的情况,通过对比观测相机所采集的现场照片,发现对应位置基本为水泥护栏、无护栏或受到植物遮挡的情况。通过工程检测结果不难发现,梁板中心高度快速检测系统在长距离、复杂环境的条件下也能够获得较为准确的检测结果,且检测车辆的行驶速度对于检测结果未造成严重影响,检测车辆最高行驶速度可以达到120 km/h。
图5 K23+544检测结果
5 结语
在该文的研究中,首先明确了波形梁钢护栏梁板中心高度传统人工检测以及其他检测方式所存在的不足之处,然后基于3D相机成像技术研究和设计了公路波形梁钢护栏梁板中心高度快速检测系统。最后通过与传统人工检测结果进行对比,发现检测系统的检测结果与人工检测结果吻合度较高,同时将该检测系统应用于高速公路的护栏高度检测之中,通过对检测结果进行分析发现该系统在高速、复杂环境下也能够有效实现对护栏梁板中心高度的检测,因此验证了该系统用于波形梁钢护栏梁板中心高度快速检测的可行性。
参考文献
[1]王洋, 郭杜杜, 王庆庆, 等. 基于改进DeepLabV3+的无人机高速公路护栏检测[J]. 激光与光电子学进展, 2024
(4): 240-248.
[2]公路交通安全设施设计细则: JTG/T D81—2017[S]. 北京:人民交通出版股份有限公司, 2017.
[3]公路工程质量检验评定标准(第一册 土建工程): JTG F80/1—2017[S]. 北京:人民交通出版股份有限公司, 2017.
[4]陈隆. 线激光3D相机软件关键技术研究与实现[D]. 南京:南京邮电大学, 2022.
[5]白佳迪. 基于线结构光扫描的高速公路护栏板参数检测系统[D]. 西安:长安大学, 2023.
[6]杨曼, 党倩, 万剑. 基于机器视觉的公路护栏状态智能监测系统[J]. 中国交通信息化, 2023(S1): 250-254.
猜你喜欢
建材发展导向(2021年16期)2021-10-12
建材发展导向(2021年6期)2021-06-09
中国特种设备安全(2021年9期)2021-03-02
中国交通信息化(2020年7期)2021-01-14
电子制作(2019年20期)2019-12-04
测控技术(2018年2期)2018-12-09
小学阅读指南·低年级版(2018年5期)2018-11-02
江西建材(2018年4期)2018-04-10
公民与法治(2016年16期)2016-05-17
通信电源技术(2016年3期)2016-03-26