大豆—玉米带状复合种植耕种机械化研究进展
2024-06-17 08:08:06单海勇严旖旎张晋刘旭杰韩笑刘建
中国农机化学报 2024年6期
单海勇 严旖旎 张晋 刘旭杰 韩笑 刘建
摘要:为充分发挥大豆—玉米带状复合立体化种植技术优势,保证我国粮油安全,解决作物争地矛盾,配套的复合耕种机械化研究成为首要环节。从国内典型多种植模式出发,总结地区间套作技术下大豆—玉米配套耕种机械特点,围绕耕种机具整地、洁茬、施肥、排种、播深及投种等作业阶段,阐述对比耕种机械技术工作原理,发现实际生产中仍存在秸秆拥堵、种肥排量和位置不协同、播深变异系数大和投种着床不均匀等问题,从农机农艺融合方面提出轻扰低耗洁茬、处方分层施肥、种肥电驱变量控制、多传感智能仿形播种、种粒平稳着床等一系列改良大豆—玉米复合耕种机械的路径,以期促进绿色高效发展。
关键词:大豆—玉米;带状复合种植;机械化耕种;农机农艺融合
中图分类号:S233.2
文献标识码:A
文章编号:2095-5553 (2024) 06-0042-11
收稿日期:2022年12月20日
修回日期:2023年5月9日
*基金项目:江苏沿江地区农业科学研究所青年科技基金项目(YJ(2022)007);“十三五”国家重点研发计划项目(2016YFD0300209);南通乡村振兴战略研究专项课题(NTXCZX—2022—03)
第一作者:单海勇,男,1995年生,江苏盐城人,硕士,研究实习员;研究方向为农机智能化。E-mail: 1450910710@qq.com
通讯作者:刘建,男,1965年生,江苏南通人,硕士,研究员;研究方向为耕作栽培。E-mail: ntliuj@sina.com
Research progress on mechanization of soybean-corn belt composite planting
Shan Haiyong, Yan Yini, Zhang Jin, Liu Xujie, Han Xiao, Liu Jian
(Jiangsu Yanjiang Institute of Agricultural Sciences/Nantong Key Laboratory of Circular Agriculture, Nantong, 226012, China)
Abstract: In order to fully leverage the advantages of soybean-corn strip compound three-dimensional planting technology, ensure the safety of grain and oil in China, and solve the contradiction of crop land competition, the research on supporting compound cultivation mechanization has become the primary link. This article starts from typical multi planting modes in China and summarizes the characteristics of soybean-corn matching cultivation machinery under inter regional intercropping technology. Around the stages of land preparation, stubble cleaning, fertilization, seeding, sowing depth, and seeding with cultivation machinery, the working principles of comparative cultivation machinery technology are elaborated. It is found that there are still problems in actual production, such as straw congestion, uncoordinated fertilization displacement and position, large coefficient of variation of sowing depth, and uneven seeding and implantation. A series of paths for improving soybean-corn composite cultivation machinery, including light disturbance, low consumption and clean stubble, prescription layered fertilization, variable control of seed and fertilizer electric drive, multi-sensor intelligent shaping seeding, and stable seed implantation, are proposed from the perspective of integration of agricultural machinery and agronomy, so as to promote green and efficient development.
Keywords: soybean-corn; band compound planting; mechanized farming; integration of agricultural machinery and agronomy
0 引言
大豆和玉米作为我国主要粮油作物,不仅是经济发展的基础,其安全高产更是关系国计民生[1]。近年来,我国人口及人均消费水平进一步提高,人均农业耕地面积进一步减少,造成粮油供给与人口需求之间的矛盾日益突出。2023年我国玉米产量2.88×108t,基本实现自给,大豆产量约2.084×1011t,进口大豆则接近9.941×1011t,自给率仅为17.3%。中央1号文件多次提出稳玉米、扩大豆,推进大豆和油料产能提升工程。
传统大豆玉米间套作自20世纪50年代起就在全国多地应用,因田间配置不合理、施肥技术不协同、倒伏严重、管理难度大等瓶颈问题,加之机具通过性差,不适宜机械化耕种作业,导致产量效益不高。因此,四川农业大学杨文钰团队在此传统间套作基础上历经20多年研究并创新出现代大豆玉米带状复合种植技术,通过“扩间增光,缩株保密”技术对传统间套作的改良升级,形成时间差和空间差的高矮立体镶嵌结构,实现分带轮作,增加了配套耕种机械化作业可行性[2]。由于各地区土壤质地及气候环境不同,我国大豆—玉米复合主要种植地区在栽培时节、田间设置、机具类型、农艺参数等方面存在较大差异,因此需根据地区特色的栽培制度与种植习惯具体分析,进一步加大对大豆和玉米匹配耕种机具多元化、智能化功能研究,实现农机与农艺的高度融合。
本文围绕大豆—玉米带状复合耕种全过程,综述整地、洁茬、施肥、排种、播深及投种各阶段机械化应用现状,分析不同机械结构和控制方法技术特点,讨论大豆—玉米复合耕种机具存在问题与研究重点,以期完善耕种一体机械化技术,为提高我国大豆和玉米综合生产能力、促进农业可持续发展提供新增长点。
1 大豆—玉米带状复合种植耕种机械研究现状
1.1 大豆—玉米耕种机械的必要性
面对如此巨大的粮油缺口,大豆—玉米复合种植规模需求进一步加大,大批家庭农场与高标准农田建成,如何在保证大豆—玉米大面积季节档口高效作业、争抢农时,又保证高质量耕种是复合种植推广的制约因素。合理耕整地对大豆—玉米全生命周期稳定生长创造条件,优质的种床结构分为种下土壤、种上土壤与表层土块、根茬覆盖物,作物生长需要一个上松下实的环境结构。秸秆还田耕作方式对土壤耕层紧实度、储水率、微生物多样性等理化性状影响十分明显,与大豆和玉米生长周期的萌动出苗、根系发育及产量息息相关。精密播种技术是将种子按照农艺栽培要求的株距、行距和深度精准地播置于预定的土壤中位置,即“一精三准”田间配置效果,但豆类大豆与禾谷类玉米在带状复合种植中显然对播种参数要求不同,不仅如此,两类作物复合种植所需配套肥料施用也截然不同,因此提高大豆—玉米机械化作业不同作物田间分布的均匀性与配比肥料施用的精准度,通过耕种两阶段高质量栽培技术促进粮油高产成为重要一环[3]。过去我国农村劳动力充足,大豆和玉米耕种依靠“手工为主、机械为辅”型传统农业方式,研究上述现代高质量、复杂化大豆—玉米复合种植技术,仅仅依靠人工完成耕种显然无法即时满足生产要求,因此,农机与农艺融合是实现耕种作业提效降本的必然途径,随着大豆—玉米全程全面机械化发展,使用高效绿色耕种作业机具成为关键。其不仅可以减轻农民的劳动强度与降低玉米生产成本,而且可以通过智能控制满足“快、准、省”农艺措施要求,实现大豆—玉米带状复合生产专业化、生态化、现代化。
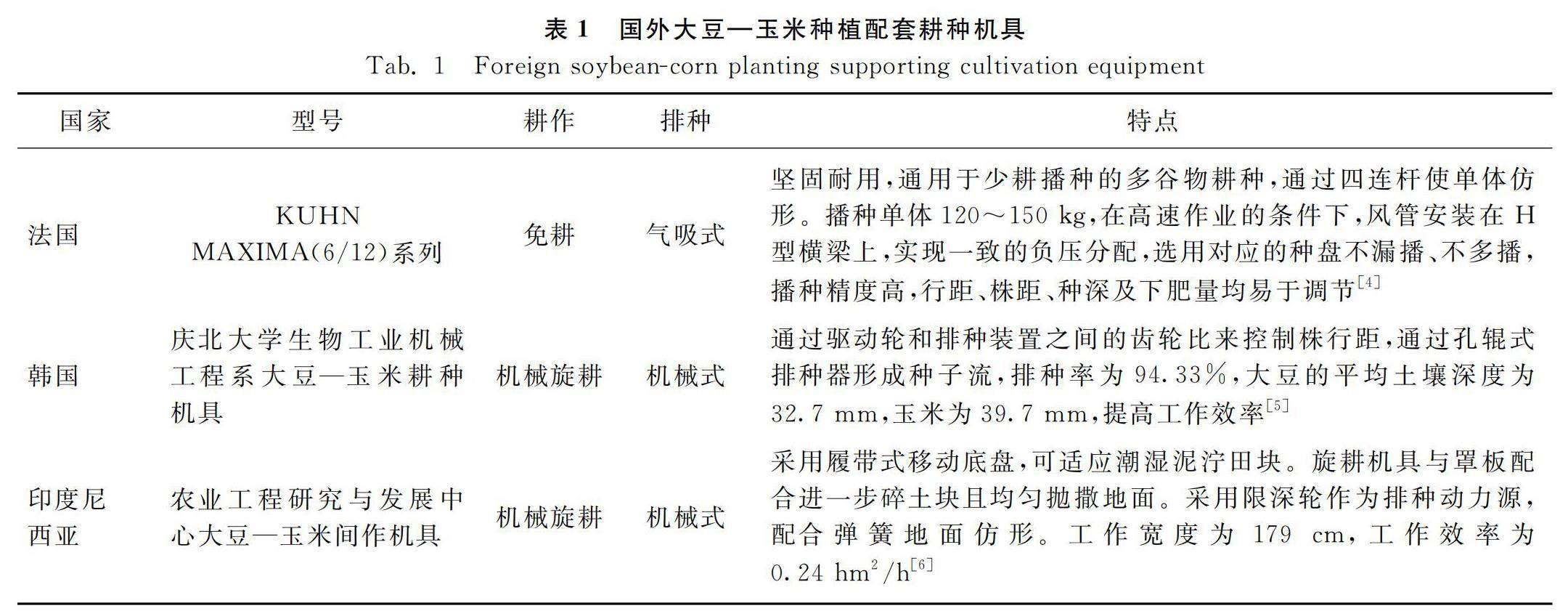
1.2 国外玉米大豆耕种机具发展
国外大豆—玉米种植配套耕种机具如表1所示。
欧美西方农业多以规模化、集约化家庭大农场模式进行生产,人少地多,不存在作物争地问题,因此大豆和玉米多采用净作进行种植。而大豆和玉米净作耕种技术的研究从20世纪30年代已经开始,并研制了配套机具,目前对大豆和玉米多采用耕整播种集成化、通用化机具,耕种效率达20 hm2/h,可在单次机具行程作业中完成耕整地、精准施肥、精量播种、质量监测及植保除草等功能[7]。所研制的耕整地、播种机械采用虚拟仿真拟合系统、数据采集系统和自动控制系统相结合,通过变量工作部件来完成精准农业的农艺要求。日韩等亚太地区多以丘陵山地为主,农业种植面积有限,因此大豆和玉米需依赖大量进口,随着对粮油、牧草饲料、工业原料需求的增加,近些年也开始进行大豆—玉米复合种植,通过大豆藤蔓缠绕玉米茎秆来增加作物产量,进一步研制复合耕种机具缓解劳动力短缺问题。
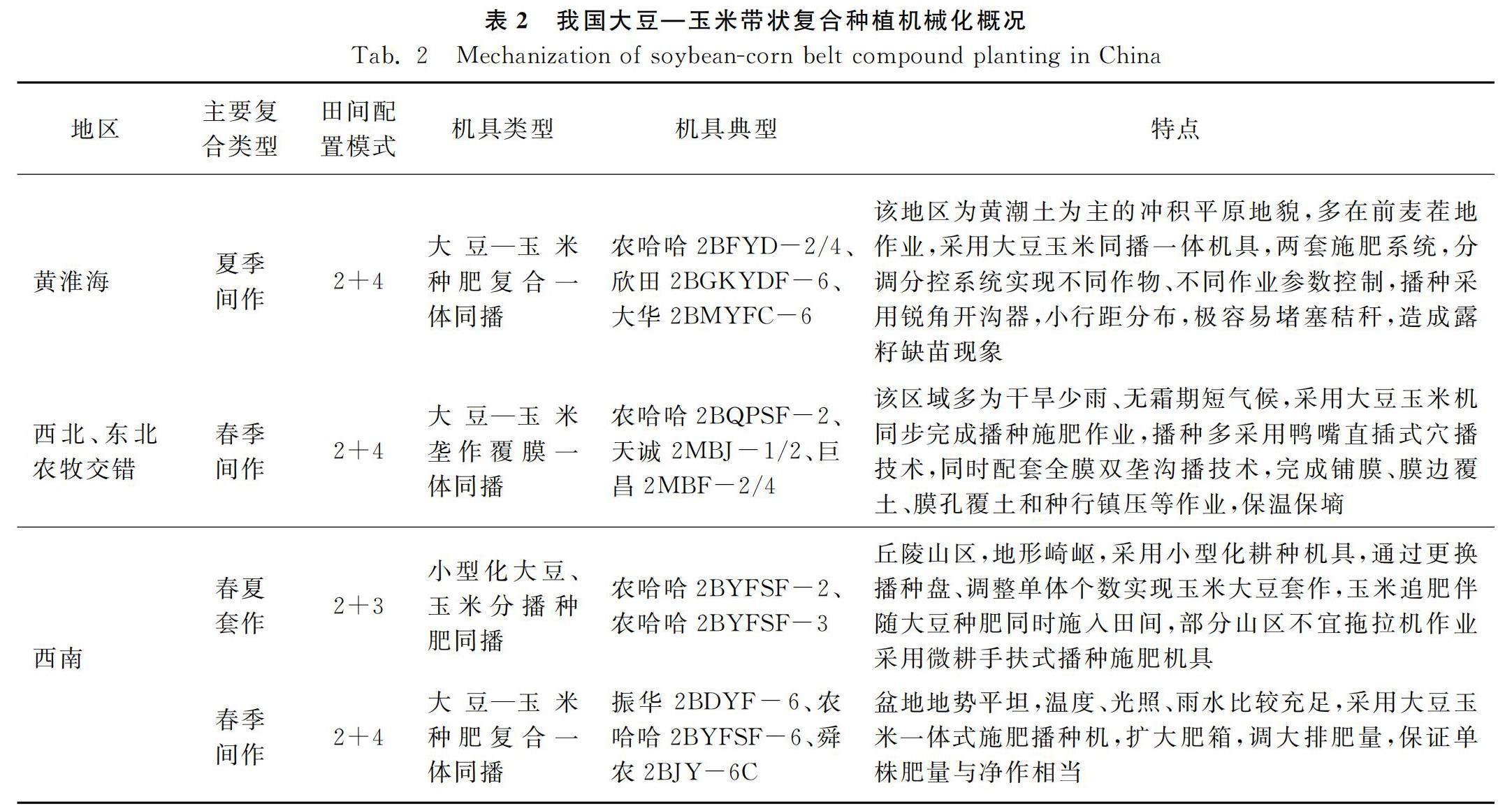
1.3 我国大豆—玉米复合种植分布情况及耕种机械化程度
我国多地区有大豆和玉米的悠久种植历史,在净作玉米或者大豆耕种机械上发展较晚,由于我国多以小地块、零散化耕种,并不适用西方大型化、多动力耕种机具,在速度、精度和智能化水平上也有一定差距。带状复种是在玉米和大豆间套的基础上发展起来,2022年,我国将在16个省市地区推广1 000 khm2大豆—玉米带状复合种植技术,分布广泛,受不同地形和气候特征影响,各地区在作物茬口、耕种时间和种植模式也有区别[8],研究与开发适用的耕种机具尤为重要,各地区配套机械如表2所示。大豆—玉米耕种过程是一个系统工程,包括了整地、洁茬、施肥、播种环节,每个环节前后紧密相连,互相影响。要获得较好机具耕种性能,即耕作方面较好的秸秆清洁度、耕深稳定性、表面平整度,播种方面较好的排量稳定性、穴粒合格率、粒距均匀性等。只有协同大豆—玉米耕种机具每个作业系统高效稳定的作业,实现良田与良机的有效结合,才能提升现代大豆—玉米复合耕种制度质量。
2 免耕与清茬技术
作为秸秆综合利用可持续发展主要措施之一,秸秆还田对于培肥地力、增加有机质、改善土壤结构有积极的意义[9]。机械化秸秆还田是一项新技术应用,是耕作制度上的创新。其还田模式包括传统的深耕翻埋、旋耕混土等主要耕作方式。这要求机械化作业需配套灭茬机、犁地机、旋耕机等,机具多次下田,生产成本高、耗工耗时。不仅如此,过多的翻耕作业还会引起土壤侵蚀、养分流失等问题,造成大量碳排放。张赛[10]研究发现,在小麦—玉米—大豆复合种植模式下,传统耕作周年固碳为39 312 kg/hm2,相比垄作+覆盖的免耕还田年固碳降低19.68%。胡发龙等[11]在小麦—玉米间作种植模式下发现,与带状间作保护性耕作相比,传统耕作土壤与单位耗水碳排放分别增加了12.4%和9.5%。
在低碳农业背景下,近些年保护性耕作因其水土保持、抗旱节水、节能增产等明显特点,得到进一步推广。秸秆还田下少耕与免耕覆盖作为保护性耕作的核心,为大豆和玉米播种前通过前茬作物收获机将秸秆切碎铺至田块表面,减少动土作业过程。但由于前茬作物机具收获时秸秆粉碎不完整、覆盖不均匀及灭茬不彻底,现复合推广模式大豆行间距较窄,导致在后续开沟作业时发生秸秆拥堵、晾籽以及作业深度不稳定现象,直接影响了后续播种施肥作业质量。
免耕作业下解决秸秆残渣防堵成为大豆—玉米复合种植可持续的重要研究热点。国内外学者通过增加秸秆处理装置来实现防堵技术功能,按其驱动方式分为主动式与被动式两种[12]。被动式秸秆处理技术主要通过机具自身重力或者装置在牵引力下拨开秸秆,包括分茬器与切茬器等,国外Fallahi等[13]分别采用圆盘式、齿形圆盘及波纹圆盘完成表面残茬碎化。廖庆喜等[14]提出锯齿圆盘切刀防堵装置,预先将田块麦秸秆、根茬进一步切碎,一定程度上达到防堵效果。赵武云等[15]开沟器前设计弹齿防堵装置,通过非线性变形对秸秆产生短时间压制,防止开沟器缠草。在拨抛防堵技术研究上,2BYF-2/4播种机具在铲式开沟器上方安装被动式圆棍防堵装置,实现层堆秸秆两侧位移,缓解秸秆在开沟播种行局部集中[16]。谷谒白等[17]运用秸秆覆盖层的连续介质流体特性,设计了“层流型”曲面分草器,达到结构简单、磨损小良好的绕流性能,但这类拨抛式防堵机构由于缺少大驱动力,在秸秆全量还田下集茬作业性能下降。被动式秸秆防堵主要机构类型如图1所示。
主动式秸秆处理技术通过外界驱动力传动到秸秆装置完成清理,包括破茬器、粉碎器和抛茬器等。黄淮海地一年两熟地区为了蓄水保墒,培养肥力,有着免耕播种大豆和玉米习惯,随着小麦高产带来的秸秆量增加,为提高后续大豆和玉米作业工序质量,增加机具通过性,秸秆防堵技术成为关键。方会敏等[18]针对这一问题设计了一种主动式圆辊拨爪式秸秆处理装置,通过将拨爪安装在开沟器上方,使用EDEM离散元仿真陆续改进了7种型号,最优作业参数下秸秆清除率85%以上。在此基础上设计了阿基米德螺线型防堵机构,机具前进速度7 km/h、液压马达主动分拨转速600 r/min,此时秸秆清除率为92.6%,引导了秸秆攀升层叠,缓解了秸秆局部集中[19]。刘建等[20]设计的一种全茬地绞龙洁区秸秆处理机构,左右绞龙关于中心线对称,作业时通过通轴螺旋绞龙输送秸秆至宽行带集覆,窄行洁区开沟。施印炎等[21]设计秸秆粉碎条铺与种带分型清秸装置,通过螺旋甩刀组将秸秆粉碎向后喷射,秸秆导流装置斜面引导自行回落两侧覆盖行内,种带清秸率均值≥90%。陈威等[22]针对机械式防堵装置入土容易挂草问题,设计一种基于气吹式防堵装置,其采用风扇与浅旋配合方式,利用气流吹散秸秆,试验结果清茬率为80.55%,晾籽率仅为0.95%,达到洁区开沟的目的。
在产品化方面,为降低大豆玉米复合种植成本,设计了2BFYD-2/4型对称钢丝拨尺清秸系统,通过PTO动力带动旋转将种植行秸秆拨置宽行处,相比旋耕切茬减小阻力,减低油耗[16]。王汉羊等[23]针对黄淮海地区一年两熟轮作制度前后茬紧接导致麦秸秆无法及时腐解问题,研发了2BMFJ-3型麦秸秆免耕大豆播种机,清秸覆秸装置与前进方向垂直,通过相错叠加4把直秸刀将秸秆、根茬切断并抛撒至机具外侧,完成对相邻播种行的秸秆覆盖。主动式秸秆防堵产品结构如图2所示。
3 精准施肥技术
大豆—玉米施肥技术是按照一定比例将均匀肥料粒播撒至根系附近,保证种子生长期足够的养分,促进健康生长。由于大豆和玉米的肥料运筹和用量不同,玉米产量有70%~80%来自施肥,需肥量大,而大豆所需营养约50%是由根瘤菌土壤固氮提供,过量施肥导致“氮阻遏”现象。
因此相比净作,大豆—玉米复合种植机械采用隔断、双排肥及分控调肥技术,如图3所示,即将肥箱进行间隔,双排肥器玉米集中施肥,同时采用两套调肥系统,满足大豆和玉米施肥量不同情况下进行下肥口独立排肥技术控制与漏肥报警等。
肥料施用的方式有多种,大豆—玉米种植施肥方式主要有种肥混施、侧位分施、正位分施等。孙昌凤[24]研究表明玉米和大豆种肥混施下,种粒与肥料相互接触,很容易发生烧种、烧苗、弱苗的现象,因此逐渐被淘汰。而机械化条施肥技术与少耕相结合,达到了保护性耕作效果,也已在我国大面积推广。机械化条施肥技术是一项节本增效的农业工程,相配套的机具发展成熟。条施排肥器主要有外槽轮式、螺旋式、铰刀波轮式等,其中外槽轮式排肥器相比其方式结构简单、均匀度更高,成为目前应用最广泛的一种,如图4所示。丁国辉[25]根据“2+3”模式设计的2BF-5大豆—玉米间作机具,采用外槽轮式排肥器与活动式开沟器实现横向可调条施肥,实现大豆不施肥,玉米行外侧施肥作业。潘世强等[26]优化条播外槽轮排肥器,采用槽铸铝为材料,排肥槽最佳工作长度为20 mm时,变异系数最小。
机械化大豆—玉米施肥技术不仅仅完善功能性研究发展,更加考虑到节本施肥、生态保护等问题。由于单行的种粒相距较远造成条施行中间肥料不易被吸收而浪费,并且多余的肥料会造成土壤板结、钙化,进一步影响作物的产量[27]。机械化穴施肥是一定质量化肥和一定数量种子相匹配的参数化施肥技术,对玉米—大豆生产节本增效、健康幼苗及精量高产可持续发展有重要作用。目前穴施肥方式主要有扎穴施肥与开沟穴施肥等,扎穴施肥主要通过排肥器与回转扎穴装置组合,通过扎穴口间隔往复扎穴动作,扎穴嘴开闭实现均匀肥料精准定位。胡红等[28]采用驱动曲柄—连杆结构与回位弹簧组合,实现扎穴嘴往复间隔扎穴,但是这种扎穴施肥装置往复工作效率较低,适合小型机具,不适用高速作业,而开沟穴施肥方式建构简单,应用较广。
相关学者进一步从穴施排肥器结构研究,台启磊[29]设计可调式窝眼式精量排肥器,通过孔型深度和调节板开度大小调节穴施排量。周云峰[30]设计一种弹射活塞式排肥器,利用活塞机构的间歇运动实现肥料成穴,见图5。张俊雄等[31]通过“机+电”集成方式设计正位穴深施肥精播机,在已有外槽轮式排肥器均匀输送肥料流装置上,在波纹管下端安装间歇排肥机构,由步进电机正反转控制挡板的开闭从而实现穴施与条施的切换。表3对各现有大豆—玉米机械化施肥原理及结构优缺点进行了比较。
“精准施肥”是根据土壤肥力、作物需肥与目标产量,以合理的施肥方式最大限度提高土壤肥力获得最佳经济、生态效益。李伟为[32]为了解决传统测土施肥传感缓慢及测量片面问题,利用与“互联网+3S”技术结合方式,建立4层体空间体系的实时空间施肥大数据可视化地图系统,为大豆—玉米施肥机具提供分区域、分作物的变量施肥处方。王荣本等[33]为节省应用卫星系统成本,采用机器视觉技术识别大田玉米的生长状况进而对大豆和玉米定株、定点精确施肥,实现农作物智能化精耕细作。
4 精密播种技术
4.1 精密排种技术
大豆—玉米精密播种技术是将定量的种粒按照适宜的行距、株距和深度进行穴播,最大限度提高田间高标准复合播种的均匀性,使相同作物对水分、养分及光能良好吸收,实现植株长势一致性,从而提高产量。大豆—玉米机械化复合播种是一个复杂的系统工程,主要包括排种、投种和着床3个环节,各个环节前后紧密相连,互为影响,只有在精密协调作业下,大豆—玉米机具才能获得较好的播种性能(重播指数、漏播指数、合格粒距变异系数等)[34]。现代大豆—玉米带状复合种植通过“分带轮作,扩行缩株”技术融合,在播种环节配套的机具上,通过U型连接管将功能集成化的播种单体活动连接在机架上,根据不同宽带与窄带行距横向灵活调整安装位置,采用分控分调独立驱动系统设计,以实现大豆和玉米不同农艺的耕种要求。
排种器是实现大豆—玉米带状复合种植的核心部件,按照农艺要求连续提供连续种子流。大豆和玉米形状不同,但是大小相似,因此在排种器结构上有一定的通用性,主要分为机械式和气力式排种器,气力式由于生产成本与加工精度在我国应用不高,机械排种器主要包括:窝眼式、勺轮式、指夹式等。窝眼式排种器是依靠种粒重力滚入窝眼轮上的型孔中,经过刮种器去除多余的种子,根据原理需对不同形状的大豆和玉米分别对应制作型孔,适合相同作物相同尺寸种粒排种[35]。针对传统窝眼式大豆排种器在高速作业下出现破损、漏播问题,设计半圆孔式接触箱壁和更换弹性柔软式刮种毛刷,通过在窝孔旁增加波纹板,转动时短暂性破坏籽粒平衡来增加进窝孔的概率。勺轮式排种器通过勺齿与隔板形成持种空间完成充种,运动到隔板缺口进行落种,一定程度上减少了排种过程挤压损伤现象。为减少大豆和玉米种粒在高速播种时振动掉落现象,指夹式排种器逐渐被推广应用。王金武等[36]先后采用EDEM离散元模拟和正交台架度因素试验优化指夹式排种器,结果表明:弹簧丝径为0.77 mm,排种器转速小于19.2 r/min时,性能最优。为满足现代大豆—玉米复合种植模式玉米“单粒密株”特点,因此现有的机械式排种器多以增加窝眼密度、轮盘勺数、指夹密度及优化变速箱提高转速形成密集种子流。在解决大豆“单穴多粒”环节,通过并列多排型孔、修改勺齿等优化实现。此外,在应对西北地区地膜覆盖保墒、抗旱技术上,大豆和玉米直插式播种配套技术能减少动土和对地膜的损坏,其主要通过滚轮与地面摩擦滚动完成打孔器在土壤打孔。赵武云等[37]设计直插式播种机并进行ADAMS仿真,通过分析仿真轨迹优化打孔器和投种等参数。
4.2 播深测控技术
播种深度是高质量栽培的重要指标,播种深度指的是种子上所覆盖土壤厚度,一般认为播种深度即开沟深度。播种深度影响大豆—玉米带状复合种植的出苗率、出苗时间、养分吸收、墒情氧气流通等。相关研究表明[38],大豆和玉米的播种深度有着较大差异,为大豆更好出苗,并防玉米倒伏,通常玉米播种深度比大豆深1~2 mm为宜。种粒在较紧实的下土壤之上或较浅的种上土壤底部,但通常田块土地为非结构化,平整度不一,因此同一机具不同种粒的播种深度及变异系数至关重要。
播种深度控制主要依靠播种机具仿形机构实现,按结构类型分为整体仿形与单体仿形。马旭等[39]研制的2BS-2精密播种机,设计浮动三点悬挂+地轮组合实现整体仿形,因此难以达到大豆和玉米不同的播种深度。单体仿形是对每一播种作业行独立局部仿形,相比整体仿形的播种精度和稳定性进一步优化,逐渐在国内大量应用。开沟深度按驱动方式分为被动式仿形与主动式仿形,国内播种机具开沟深度多数采用被动式仿形,其主要通过先前手动调节播种单体弹簧初始形变量,达到大豆和玉米每一作业行不同预紧力(压缩或拉伸),从而机具作业时连杆和仿形轮随地形起伏变化,自动调整开沟器上下垂直的相对距离,实现不同作物的播种深度。张守勤等[40]通过建立仿形轮压力数学模型,并通过仿真优化单组的结构参数。
由于机械弹簧式仿形机构不适应局部土壤紧实度多变情况,会影响播种单行的播深一致性,且在机具高速播种作业时会发生仿形提前或滞后等现象。主动式仿形开沟技术通过检测单位测量实际模拟量反馈,与设定深度进行对比,控制单元计算误差,自动驱动开沟器深度微调节,通过机、电、液结合提高仿形响应。在接触式播深控制系统上,赵金辉等[41]设计双位移接触式传感系统、PLC控制系统及液压驱动单元播深闭环控制方案,试验表明:系统播种控制响应性提高到0.12 s,局部播深稳定性系数≥90%。白慧娟等[42]为提高播深一致性将特定下压力传感器安装在限位轴销上,通过车载控制器比较测量值与阈值大小,从而驱动液压驱动系统实时调整播深,合格率提升≥13%。黄东岩等[43]为进一步提高播深精度,采用PVDF压电薄膜传感器安装于限深轮的胎面,将薄膜形变量转换为电压信号进行滤波放大,驱动空气弹簧调整四连杆。除了基于力接触式测定系统,还有依据其他参量的模拟值。Weatherly等[44]采用DFS湿度传感器设计了一款基于接触式播深系统,通过土壤含水率参数调整开沟深度。在非接触式播深控制方式方面,Hiroshi等[45]通过将超声波传感器与量规轮进行比较来确定气吸式播种机的开沟器工作深度。不仅如此,Suomi等[46]采用竖直超声播与角度传感器组合控制系统,当机具速度为10 km/h,播种深度为20~50 mm时,控制误差在10 mm以内。
4.3 平稳投种着床技术
大豆和玉米平稳投种着床是机具精密播种籽粒,经由导种系统到达种床的过程。由于种子本身类球形状且具有较高的动量,会出现籽粒在种床内触土弹跳、偏移和滚动的现象,随着排种器作业速度的提高,以及秸秆混土导致田块物理性状改变,投种过程的不确定性影响因素更多造成玉米籽粒在种床内分布不规则,从而影响田间微环境,降低光、热等资源的利用效率,增加田间管理难度,降低玉米产量。因此,如何抑制玉米种子与土壤接触后的弹跳滚动是提高机械化播种高效、高产的关键。
以往大多采用试验的方法对非连续体颗粒材料间碰撞互作进行研究。王未等[47]采用均匀设计方法,对圆盘开沟种子触土后的弹跳滚动位移进行试验测定,建立机具开沟角与覆土板宽度参数与籽粒弹跳滚动的回归方程。马旭等[48]研究种子落入种沟后弹跳滚动,通过二次通用旋转设计试验方法建立桌底速度、角度影响因素与籽粒弹跳位移的数学模型。
随着计算机技术的发展,采用离散元法(DEM)来分析颗粒与其他颗粒的接触作用可以解决上述问题,对不连续领域物体群体复杂的运动行为和力学行为进行精准分析。Coetzee等[49]分别用多面体方法、多球方法建立了玉米种子颗粒模型,对种子颗粒模型的参数进行标定。石林榕等[50]采用扫描的方法获得种子颗粒轮廓后,建立马齿形种子颗粒模型,分析了种子颗粒尺寸对排种器性能的影响。周龙[51]采用离散元法(DEM)来分析颗粒与机械部件的接触作用,通过单因素仿真试验对影响种子弹跳位移的因素进行了研究。
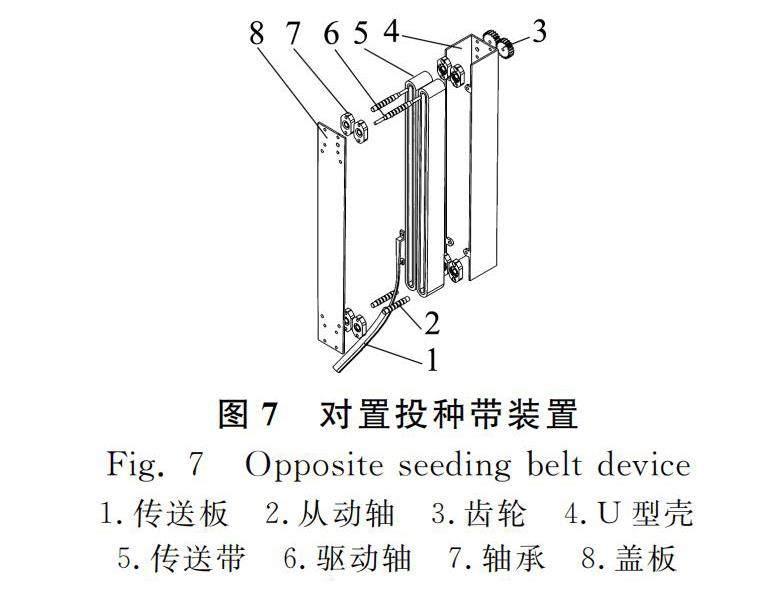
在抑制大豆—玉米着床弹跳滚动先进机械设计上,通过在排种器下方延伸一段导种滑道,降低投种高度,投种口交叉开沟器方朝后抵消前进速度,接近“零速投种”,从而减少滚动弹跳[52],如图6所示。
国外提出一种“二次投种”理论,即将排种器出口种粒运输到较低的投种高度再投种,减少种粒着床的不确定性。Garner等[53]设计的毛刷导种带柔性夹持种粒在低位实现平稳投种。陈玉龙等[54]设计一种对置带式精确投种装置,通过并列平行安装软质输送带,完成排种后对种粒的柔性包裹并精准着床,见图7。陈学庚等[55]设计气吸式排种器带式导种装置一体协同作业系统,拨指将种子顺次拨出并进入栅格,取种轮与排种轴速度匹配,种子在输送带隔板的推力和重力作用下平稳着床,试验表明:投种高度为100 mm,取种盘转速为30 r/min,粒距合格率为≥97%,提高投种质量。
5 大豆—玉米机械化耕种存在问题
随着大豆—玉米带状复合种植不断推广,通过改装单种作物耕种机具的过渡方式也逐渐趋于向复合耕种机具独立设计方向发展。在此过程机具的作业效率、作业质量有了较大的提升,但是从国内的复合耕种及发展现状来看,尚存在以下问题需要突破。
5.1 机械化秸秆还田技术应用问题
前茬秸秆处理是大豆—玉米机械化高质量带状复合种植的前提条件,其中小麦秸秆占大多数,为促进农业可持续发展,助力农业生产“碳达峰、碳中和”,截至2023年,我国秸秆机械化还田率达到86%,露天焚烧现象明显减少。通常通过旋耕与深翻方式进行机械秸秆处理,但干旱的西北及沿海盐碱地区特定的土地特性,土地耕层浅,影响还田质量,进而对后续大豆和玉米种肥机械施用有较大影响。保护性机械化耕作技术对土壤的扰动小,但随着近年来小麦生产带来的大量秸秆问题,导致秸秆粉碎度达不到要求,开沟部件大量秸秆拥堵,拖拉机牵引力功耗增加,机具通过性差,地轮被秸秆缠绕架空,由地轮传动结构的施肥播种轴失去动力,且过多秸秆覆盖使得机播出现晾籽现象。
5.2 大豆—玉米机械化施肥协同作业问题
现有小部分地区仍采用种肥机械化混施方式,需要后期多次追肥才能保证大豆—玉米的周期营养。机械化条施肥在应用上为主流方式,对于条播作物可以很好地提供生长营养,但是在大豆和玉米以穴播种为主的方式上,种子间的肥料很难被吸收,容易造成土壤的板结。在机械化穴施肥上,施肥穴定位成形是核心,西北及丘陵地区小型机具以直插式一次定位成穴为主,而在其他地区仍以排肥器—输肥管—开沟方式为主,对颗粒状肥料无法有效的约束,造成穴长和穴距稳定性较差。此外国内农机地轮驱动仍为主要驱动方式,限制了播种速度和精度,难以满足大豆—玉米复合短株距农艺要求,一些农机采用地轮+电驱动混合驱动方式,由于两种方式缺少相同参考量,引起种肥穴施驱动轴速度不协同,导致播种穴和施肥穴的位置匹配精度不高。
5.3 播种机具性能单一及种粒平稳着床问题
我国大豆—玉米带状复合种植各推广地区地形结构与土质性质有很大差别,间套作模式繁多。研发一两种类型播种机具无法满足实际需求。在播种深度上,被动机械式单体仿形应用广泛,弹簧—平行四连杆仿形结构在仿形精度和稳定性上有待提高。在大豆和玉米平稳投种研究上,国外研发的先进稳定投种着床和监控补种装置使种粒株距与均匀性有很大提高,国内仍采用投种管,受外界不确定外界因素影响较多,带式、气式投种和多传感监控补种系统仍处于试验研究状态,生产应用较少。
6 建议与发展趋势
根据以上大豆—玉米耕种机械化存在的关键技术问题,要推动大豆—玉米复合种植技术高效、优质的发展,必须对上述存在问题给予解决。
1) 应对秸秆还田应用问题,建议在未来的机械化作业中,减少被动式秸秆防堵机具,改进动土多及功耗大等主动式秸秆清理机具,在保证安全作业的条件下,结合现代大豆—玉米宽窄行带状种植等农艺技术,重视秸秆物理刚柔耦合特性与机械接触特性等基础性机理研究,加快气力式吹茬和微动土拨茬等秸秆处理技术研发与落地应用,实现“先扫后盖”轻扰低功耗作业功能,提升定向秸秆抛撒能力,减少土尘的产生。
2) 应对机械化施肥协同作业问题,建议加强大豆—玉米穴施肥装备技术研究与技术应用,达到节本增效目的。在穴施成形上采用机—电—传感结合的多定位技术,保证成穴效果。另一方面,设计与开发分层穴施装备,保证作物根系在吸肥时间节点与不同施肥层养分供应协调。不断探索“测土配方—变量施肥”智能化施肥技术,加快大豆—玉米不同田块局部肥料处方图实时检测与机具无级变量施肥系统落地。
3) 应对机具性能单一及种粒着床问题,建议通过“造改结合”,根据不同区域复合种植主推技术模式的播种农机作业需要,紧抓现有机具适配改造应用,加快西南丘陵小型间套作播种机具与其他中大型播种机具研制推广。在排种器上,国内大豆和玉米机械式排种装备发展健全,围绕“缩株保密”农艺要求展开排种器研究(如流体播种、电磁播种),形成稳定连续的种子流,设计监测补种系统实时响应保证苗全。开展多传感播深检测与实时主动式仿形研究,提高播深控制精度,将播深仿形“自适应”逐步改进成“智适应”。在大豆和玉米平稳投种研究上,国内仍然以导种管方式投种,种粒株距与均匀性不高,在借鉴吸收国外投种技术上,围绕“零速投种”和“二次投种”理念,加快大豆和玉米平稳投种着床装备开发与应用。
7 结语
大豆—玉米带状复合耕种机械化是实现粮油安全的重要保障,尽管种植农艺技术已经取得较好地验证,但复合耕种机械化发展较为缓慢,现有的大豆—玉米复合作业机具性能较为单一,在很多主推地区呈现“水土不服”。大豆—玉米耕种机械化是一个复杂工程,需农机与农艺相结合,从我国多种植区域耕种制度及地理环境出发,围绕清茬、整地、施肥机播种衔接作业环节综合考虑,设计与开发相配套的智能化机具。
参 考 文 献
[1]罗艳, 赵健, 段晓红, 等. 玉米—大豆带状复合种植模式研究初报[J]. 宁夏农林科技, 2020(12): 1-3.
[2]吴维雄, 罗锡文, 杨文钰, 等. 小麦—玉米—大豆带状复合种植机械化研究进展[J]. 农业工程学报, 2015, 31(S1): 1-7.
Wu Weixiong, Luo Xiwen, Yang Wenyu, et al. Review on mechanization of strip compound planting system of wheat-maize-soybean [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(S1): 1-7.
[3]单海勇, 刘旭杰, 张晋, 等. 旱地玉米播种施肥机械低碳化发展及有效路径[J]. 现代农业装备, 2022, 43(3): 13-18.
Shan Haiyong, Liu Xujie, Zhang Jin, et al. Low-carbon development and effective path of dryland corn sowing and fertilization machinery [J]. Modern Agricultural Equipments, 2022, 43(3): 13-18.
[4]王姣. 满足不同选择——库恩MAXIMA 2系列气吸式精量点播机[J]. 农业机械, 2013(5): 40-45.
[5]Woo S M, Uyeh D D, Sagong M S, et al. Development of seeder for mixed planting of corn and soybeans [J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 95-101.
[6]Budiharti U. Development of integrated machine for tillage, corn planter and fertilizer application [C]. IOP Conference Series: Earth and Environmental Science. IOP Publishing, 2019, 355(1): 012062.
[7]李洪昌, 高芳, 赵湛, 等. 国内外精密排种器研究现状与发展趋势[J]. 中国农机化学报, 2014, 35(2): 12-16, 56.
Li Hongchang, Gao Fang, Zhao Zhan, et al. Domestic and overseas research status and development trend of precision seed-metering device [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 12-16, 56.
[8]劳秀荣, 吴子一, 高燕春. 长期秸秆还田改土培肥效应的研究[J]. 农业工程学报, 2002(2): 49-52.
Lao Xiurong, Wu Ziyi, Gao Yanchun. Effect of long-term returning straw to soil on soil fertility [J]. Transactions of the Chinese Society of Agricultural Engineering, 2002(2): 49-52.
[9]张卓. 基于玉米大豆轮作模式的大豆精密播种技术研究及配套耕播机设计[D]. 长春: 吉林大学, 2019.
Zhang Zhuo. Research on the soybean precision seeding technology and till-planter design under corn and soybean rotation model [D]. Changchun: Jilin University, 2019.
[10]张赛. 不同耕作模式下“小麦/玉米/大豆”套作农田碳平衡特征研究[D]. 重庆: 西南大学, 2014.
Zhang Sai. Carbon balance characteristics in the triple intercropping system of wheat/corn/soybean under different farming modes [D]. Chongqing: Southwest University, 2014.
[11]胡发龙, 柴强, 甘延太, 等. 少免耕及秸秆还田小麦间作玉米的碳排放与水分利用特征[J]. 中国农业科学, 2016, 49(1): 120-131.
Hu Falong, Chai Qiang, Gan Yantai, et al. Characteristics of soil carbon emission and water utilization in wheat/maize intercropping with minimal/zero tillage and straw retention [J]. Scientia Agricultura Sinica, 2016, 49(1): 120-131.
[12]何进, 李洪文, 陈海涛, 等. 保护性耕作技术与机具研究进展[J]. 农业机械学报, 2018, 49(4): 1-19.
He Jin, Li Hongwen, Chen Haitao, et al. Research progress of conservation tillage technology and machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 1-19.
[13]Fallahi S, Raoufat M H. Row-crop planter attachments in a conservation tillage system: A comparative study [J]. Soil and Tillage Research, 2008, 98(1): 27-34.
[14]廖庆喜, 王世学, 高焕文. 免耕播种机新型锯齿防堵装置防堵机理的研究[J]. 中国农业大学学报, 2003(4): 14-19.
Liao Qingxi, Wang Shixue, Gao Huanwen. Study on anti-blocking mechanism of the sawtooth anti-blocking component for no-tillage planter [J]. Journal of China Agricultural University, 2003(4): 14-19.
[15]赵武云, 张锋伟, 吴劲锋, 等. 免耕播种机弹齿式防堵装置[J]. 农业机械学报, 2007(3): 188-190.
Zhao Wuyun, Zhang Fengwei, Wu Jingfeng, et al. Brief Report on Research Works of Eight Papers [J]. Transactions of the Chinese Society for Agricultural Machinery, 2007(3): 188-190.
[16]李文平, 王文国, 李刚, 等. 2BYF-4玉米施肥精播机的创新与应用[J]. 农业装备技术, 2017, 43(2): 18-19.
[17]谷谒白, 张云文, 宋建农. “层流型”分草曲面用于覆盖免耕播种机的研究[J]. 农业机械学报, 1994(1): 46-51.
Gu Yebai, Zhang Yunwen, Song Jiannong. A study on “laminar flow splitter” as blockage proofing device for mulching no-tillage planters [J]. Transactions of the Chinese Society of Agricultural Machinery, 1994(1): 46-51.
[18]方会敏, 史嵩, 乔璐, 等. 圆辊拨爪式防堵机构作业性能的模拟与试验[J]. 中国农机化学报, 2018, 39(12): 1-9.
Fang Huimin, Shi Song, Qiao Lu, et al. Numerical and experimental study of working performance of round roller-claw type anti-blocking mechanism [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(12): 1-9.
[19]牛萌萌, 方会敏, CHANDIO F A, 等. 秸秆分拨引导式玉米免耕防堵机构设计与试验[J]. 农业机械学报, 2019, 50(8): 52-58.
Niu Mengmeng, Fang Huimin, CHANDIO F A, et al. Design and experiment of separating-guiding anti-blocking mechanism for no-tillage maize planter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(8): 52-58.
[20]刘建, 单海勇, 刘旭杰, 等. 玉米、大豆宽窄行带条状间作施肥播种装置[P]. 中国专利: CN217657026U, 2022-10-28.
[21]施印炎, 罗伟文, 胡志超, 等. 全量秸秆粉碎条铺与种带分型清秸装置设计与试验[J]. 农业机械学报, 2019, 50(4): 58-67.
Shi Yinyan, Luo Weiwen, Hu Zhichao, et al. Design and test of equipment for straw crushing with strip-laying and seed-belt classification with cleaning under full straw mulching [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 58-67.
[22]陈威, 曹成茂, 赵正涛, 等. 气吹式防堵大豆免耕播种机设计与试验[J]. 东北农业大学学报, 2019, 50(10): 71-79.
Chen Wei, Cao Chengmao, Zhao Zhengtao, et al. Design and experiment of air blowing anti-blocking soybean notillage seedling machine [J]. Journal of Northeast Agricultural University, 2019, 50(10): 71-79.
[23]王汉羊, 陈海涛, 纪文义. 2BMFJ-3型麦茬地免耕精播机防堵装置[J]. 农业机械学报, 2013, 44(4): 64-70.
Wang Hanyang, Chen Haitao, Ji Wenyi. Anti-blocking mechanism of type 2BMFJ-3 no-till precision planter for wheat stubble fields [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 64-70.
[24]孙昌凤. 种肥对玉米种子萌发与幼苗生长的影响及施用技术研究[D]. 保定: 河北农业大学, 2005.
Sun Changfeng. Effect of the maize seeds on seed manure of characteristics of seed germination and seedling emergence and study on the method of seed manure application [D]. Baoding: Hebei Agricultural University, 2005.
[25]丁国辉. 玉米—大豆间作播种机的设计与相关参数研究[D]. 雅安: 四川农业大学, 2017.
Ding Guohui. The design and parameter study on the maize and soybean intercropping seeder [D]. Yaan: Sichuan Agricultural University, 2017.
[26]潘世强, 赵亚祥, 金亮, 等. 2BFJ-6型变量施肥机外槽轮式排肥器的设计与试验研究[J]. 中国农机化学报, 2016, 37(1): 40-42.
Pan Shiqiang, Zhao Yaxiang, JinLiang, et al. Design and experimental research of external grooved wheel fertilizer apparatus of 2BFJ-6 type variable rate fertilizer applicator [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(1): 40-42.
[27]王紫玉. 玉米变量穴施肥试验台控制系统的研究[D]. 大庆: 黑龙江八一农垦大学, 2019.
Wang Ziyu. Research of corn variable hole fertilizer test bed control system [D]. Daqing: Heilongjiang Bayi Agricultural University, 2019.
[28]胡红, 李洪文, 王庆杰, 等. 玉米行间定点扎穴深施追肥机的设计与试验[J]. 农业工程学报, 2016, 32(24): 26-35.
Hu Hong, Li Hongwen, Wang Qingjie, et al. Design and experiment of targeted hole-pricking and deep-application fertilizer applicator between corn rows [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(24): 26-35.
[29]台启磊. 可调窝眼轮式精量排肥器设计与试验[D]. 合肥: 安徽农业大学, 2020.
Tai Qilei. Design and experiment of adjustable socket-eye precision fertilizer feeder [D]. Hefei: Anhui Agricultural University, 2020.
[30]周云峰. 播种机用穴施肥器[P]. 中国专利: CN02259249.0, 2003-10-08.
[31]张俊雄, 蔺泽虹, 李伟, 等. 一种玉米正位穴深施肥精播机及其精播方法[P]. 中国专利: CN201611199767.7, 2017-05-10.
[32]李伟为. 基于WEBGIS的玉米精准施肥系统的设计与实现[D]. 长春: 吉林农业大学, 2011.
Li Weiwei. Research and design of corn precision manure system based on WEBGIS [D]. Changchun: Jilin Agricultural University, 2011.
[33]王荣本, 纪寿文, 初秀民, 等. 基于机器视觉的玉米施肥智能机器系统设计概述[J]. 农业工程学报, 2001(2): 151-153.
Wang Rongben, Ji Shouwen, Chu Xiumin, et al. General design for corn fertilizing intelligent machine vehicle system based on machine vision [J]. Transactions of the Chinese Society of Agricultural Engineering, 2001(2): 151-153.
[34]苑严伟, 白慧娟, 方宪法, 等. 玉米播种与测控技术研究进展[J]. 农业机械学报, 2018, 49(9): 1-18.
Yuan Yanwei, Bai Huijuan, Fang Xianfa, et al. Research progress on maize seeding and its measurement and control technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(9): 1-18.
[35]李洪昌, 高芳, 赵湛, 等. 国内外精密排种器研究现状与发展趋势[J]. 中国农机化学报, 2014, 35(2): 12-16, 56.
Li Hongchang, Gao Fang, Zhao Zhan, et al. Domestic and overseas research status and development trend of precision seed-metering device [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 12-16, 56.
[36]王金武, 唐汉, 王奇, 等. 基于EDEM软件的指夹式精量排种器排种性能数值模拟与试验[J]. 农业工程学报, 2015, 31(21): 43-50.
Wang Jinwu, Tang Han, Wang Qi, et al. Numerical simulation and experiment on seeding performance of pickup finger precision seed-metering device based on EDEM [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(21): 43-50.
[37]赵武云, 戴飞, 杨杰, 等. 玉米全膜双垄沟直插式精量穴播机设计与试验[J]. 农业机械学报, 2013, 44(11): 91-97.
Zhao Wuyun, Dai Fei, Yang Jie. Design and experiment of direct insert precision hill-seeder with corn whole plastic-film mulching on double ridges [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(11): 91-97.
[38]付卫强. 玉米免耕精密播种质量控制关键技术研究[D]. 北京: 中国农业大学, 2019.
Fu Weiqiang. Study on key technology of quality control for maize no-tillage drilling machinery [D]. Beijing: China Agricultural University, 2019.
[39]马旭, 马成林, 于建群, 等. 2BS-2型玉米精密播种机的研究[J]. 农业机械学报, 1998(S1): 39-44.
Ma Xu, Ma Chenglin, Yu Jianqun, et al. The study of 2BS-2 corn precision planter [J]. Transactions of the Chinese Society of Agricultural Machinery, 1998(S1): 39-44.
[40]张守勤, 马成林, 马旭, 等. 精密播种单体仿形机构的计算机仿真[J]. 农业工程学报, 1994(1): 50-55.
Zhang Shouqin, Ma Chenglin, Ma Xu, et al. Computer simulation for the parallelogram linkage of precision planter unit (PLPPU) [J]. Transactions of the Chinese Society of Agricultural Engineering, 1994(1): 50-55.
[41]赵金辉, 刘立晶, 杨学军, 等. 播种机开沟深度控制系统的设计与室内试验[J]. 农业工程学报, 2015, 31(6): 35-41.
Zhao Jinhui, Liu Lijing, Yang Xuejun, et al. Design and laboratory test of control system for depth of furrow opening [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(6): 35-41.
[42]白慧娟, 方宪法, 王德成, 等. 玉米播种机播深和压实度综合控制系统设计与试验[J]. 农业机械学报, 2020, 51(9): 61-72.
Bai Huijuan, Fang Xianfa, Wang Decheng, et al. Design and test of control system for seeding depth and compaction of corn precision planter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 61-72.
[43]黄东岩, 朱龙图, 贾洪雷, 等. 基于压电薄膜的免耕播种机播种深度控制系统[J]. 农业机械学报, 2015, 46(4): 1-8.
Huang Dongyan, Zhu Longtu, Jia Honglei, et al. Automatic control system of seeding depth based on piezoelectric film for no-till planter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(4): 1-8.
[44]Weatherly E T, Jr C G B. Automatic depth control of a seed planter based on soil drying front sensing [J].Transactions of the ASAE American Society of Agricultural Engineers, 1997, 40(2): 295-305.
[45]Hiroshi, Okamoto, Marlowe, et al. Development of seeding depth control system for conservation tillage cultivation [J]. 農業食料工学会誌, 2014, 76(1): 62-69.
[46]Suomi P, Oksanen T. Automatic working depth control for seed drill using ISO 11783 remote control messages [J]. Computers & Electronics in Agriculture, 2015, 116: 30-35.
[47]王未, 马旭, 袁锐, 等. 基于均匀设计的种子弹跳滚动位移的试验研究[J]. 吉林农业大学学报, 2006(6): 694-696, 701.
Wang Wei, Ma Xu, Yuan Rui, et al. Experimental study on displacement of seed bounce and rolling based on uniform design [J]. Journal of Jilin Agricultural University, 2006(6): 694-696, 701.
[48]马旭, 于海业, 杨海宽. 种子落于种沟后弹跳滚动位移的测定及建模[J]. 农业机械学报, 1998(S1): 62-66.
Ma Xu, Yu Haiye, Yang Haikuan. The determining and model establishing of seed bouncing and rolling displacement after impact on a furrow [J]. Transactions of the Chinese Society of Agricultural Machinery, 1998(S1): 62-66.
[49]Coetzee C J, Els D N J. Calibration of discrete element parameters and the modelling of silo discharge and bucket filling [J]. Computers & Electronics in Agriculture, 2009, 65(2): 198-212.
[50]石林榕, 吴建民, 孙伟, 等. 基于离散单元法的水平圆盘式精量排种器排种仿真试验[J]. 农业工程学报, 2014, 30(8): 40-48.
Shi Linrong, Wu Jianmin, Sun Wei, et al. Simulation test for metering process of horizontal disc precision metering device based on discrete element method [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(8): 40-48.
[51]周龙. 基于离散元法的玉米种子建模及播种过程的仿真分析与试验研究[D]. 长春: 吉林大学, 2021.
Zhou Long. DEM-based modelling of maize seeds and the simulation analysis and experimental study of the seed-sowing [D]. Changchun: Jilin University, 2021.
[52]史智兴. 精播机排种性能检测系统及关键技术研究[D]. 北京: 中国农业大学, 2002.
Shi Zhixing. Study on the detection system & key techniques for seeding quality of precision planter [D]. Beijing: China Agricultural University, 2002.
[53]Garner E B, Natarajan K. Seed meter assembly for a seeding machine [P]. US Patent: US20200120859A1, 2024-03-15.
[54]陈玉龙, 张隆梅, 兰玉彬, 等. 一种对置带式精确投种装置[P]. 中国专利: CN209930893U, 2020-01-14.
[55]陈学庚, 钟陆明. 气吸式排种器带式导种装置的设计与试验[J]. 农业工程学报, 2012, 28(22): 8-15.
Chen Xuegeng, Zhong Luming. Design and test on belt-type seed delivery of air-suction metering device [J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(22): 8-15.
猜你喜欢
今日农业(2022年16期)2022-11-09 23:18:44
中国化肥信息(2022年7期)2022-08-31 01:29:28
中国化肥信息(2022年5期)2022-08-30 01:58:26
少儿科学周刊·儿童版(2021年21期)2021-12-11 01:45:00
今日农业(2021年20期)2021-11-26 01:23:56
今日农业(2021年14期)2021-10-14 08:35:34
今日农业(2021年14期)2021-10-14 08:35:34
小天使·二年级语数英综合(2019年10期)2019-11-08 07:19:36
大灰狼(2018年6期)2018-07-23 16:52:44
下一代英才(酷炫少年)(2018年6期)2018-07-09 03:17:44