输电线路运行故障无人机定位及准确性测试
2024-06-04 06:32:02山西昊翔能源集团有限公司郑建松
电力设备管理 2024年7期
山西昊翔能源集团有限公司 郑建松
无人机技术快速发展,将其应用于输电线路运行故障定位时,能够提高故障定位精度,即便遇到恶劣天气也仍然保持较高的故障识别率,因此该项技术在输电线路运行故障定位中具有推广价值。基于此,本文重点研究无人机应用策略并根据仿真结果评价技术应用效果,以供参考。
1 无人机故障定位原理
输电线路故障定位时,在图像中建立坐标轴,寻找一组含有3条及以上的直线,但由于无人机搭载的相机倾斜,以及输电线路建设场地存在复杂地形,多种因素均会干扰等距识别过程,影响检测结果的准确性[1]。因此,本文在采用无人机技术定位输电线路运行故障时,辅以图像正射校正技术,原理如图1所示。
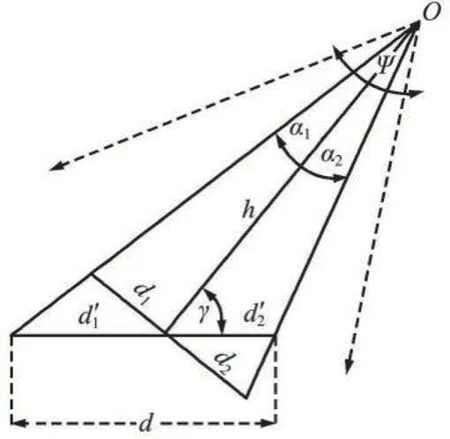
图1 图像正射校正原理图
图中:d1和d2分别为中心线路与左、右两侧线路的扭曲距离;d`1和d`2分别为中心线路与左、右两侧线路的真实距离;Ψ为无人机视野;γ为相机拔模角度。针对现场干扰因素对检测结果准确性产生的不良影响,采用不同角度和已知距离的几何关系进行消除,从而实现输电线路图像正射校正效果,提高故障定位精度。上述几项参数的关系,如公式(1)所示:
式中:a1和a2为输电线实点与焦点间的角度;h为无人机距输电线参照高度。
设定无人机距离输电线参照高度h,无人机于该处采集多幅图像后提取特征点并确定彼此间的距离,以便故障定位。将测量参考距离和参考高度与相机高度关联的反向线性函数来确定真实高度H,如公式(2)计算:
式中:D为输电线路图像中的参考距离。若要确定相机相对于中心输电线的估计x位置 和估计y位置 ,先在离线模式下建立参考坐标轴,再按照公式(3)计算确定:
式中:δ为相机围绕Z轴的旋转角度。基于视觉的定位方式受天气条件影响,若遇到大雾天气,由于雾气遮挡而导致传输线路不可见,则无法实现定位[2]。在本次研究中,采用的无人机搭载惯性测量单元附加传感器,高斯概率密度函数与传感器相关联,能够用于估计无人机的空间定位,关系式为:
公式(4)~公式(6)中:z为传感器的空间位置测量值,σ2为测量值的方差,以倒数相加的方式可确定新的测量角度估计值加权平均值和新的测量度方差σ2θ。
在确定定位参数后,能够确保遇到各类特殊天气时仍正常进行无人机故障定位,即根据定位参数确定无人机位置与输电线路位置关系。
2 无人机故障定位准确性检验
检验试验平台采用Matlab 软件搭建,底层数据采用线路状况分析信息、线路综合监测信息等,根据高效、准确的数据传输要求,依靠交换机和数据库实现传输。研究对象为郊外多个输电线塔中间段的输电线路,试验数据采用的是该部分线路在2023年1月至3月由故障检测装置采集到的运行数据,主要包含输电线路截面、额定电压、安全电流、直流电阻几项基本数据,统计结果如图2所示。
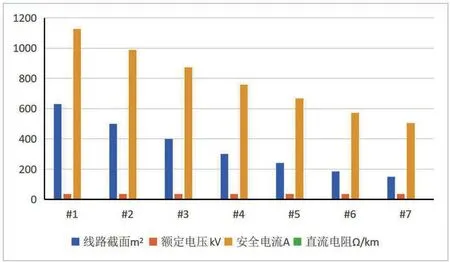
图2 试验数据统计图
试验数据库由图2中的统计数据组成,针对该部分数据进行试验操作。测试#3段输电线路在9:00~18:00时间段图像噪声过滤处理的有效性,将采集的参数代入Matlab 仿真软件已构建的数据信息模型中,向模型中输入线路状况分析信息、线路综合监测数据信息,从数据库服务器提取不同的数据信息后进行仿真,涉及的流程包含头像去模糊、Hough 变换、正射影像校正、估计距离等[3-4]。按照本文方法确定图像信息参数后,将文献[1]的输电线路故障智能定位方法的结果与之进行对比分析,评价本文方法的有效性。输电线路故障智能定位的原理是将三相电路中互相耦合的向量进行相模变化,产生独立量,再采集电流模,生成故障行波,分析波速,在Matlab 仿真软件中进行仿真,结果如图3所示。
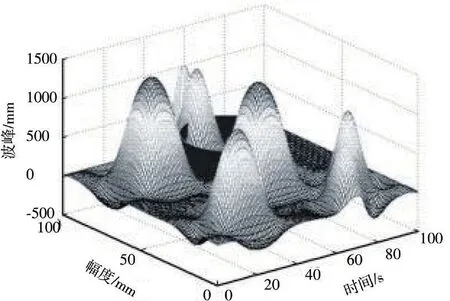
图3 故障智能定位方法仿真结果
输入数据信息类型包含线路综合监测、线路状态分析以及决策分析相关的数据信息,具体细分为分析时间、监测数据信息、波峰、幅度等,汇总数据信息后,使用故障智能定位方法仿真,建立相模变换模型,获取电流模行波速度和电流模(属于导致线路发生短路故障的关键因素),生成故障行波并进行分析。在构建等效电路图后,基于戴维南定理计算,为实现输电线路故障智能定位这一最终目标,采用拉普拉斯对等效电路进行电路换算。
从不同函数曲线呈现的三维图像来看,具有较大幅度的起伏变化,图像处理的平滑度较差,噪声变化表现不够平坦,导致此现象的主要原因在于无人机空间定位能力差、架空输电线路故障能力弱、传输线检测水平低以及图像预处理效果不良。在输电线路运行与维护时,系统的工作状态可通过系统工作站和网络服务器的运行状态予以反映,检测输电线路的过程中,数据被各节点的传输模块压缩和恢复,此操作方式有助于提高数据信息处理能力。
根据试验结果得知,本文提出的无人机故障定位检测方法除了能够高效定位输电线路故障外,还可以根据检测信息进行图像处理,处理结果具有参考意义,综合应用效果良好。本文提出的无人机故障定位检测方法的仿真结果如图4所示。
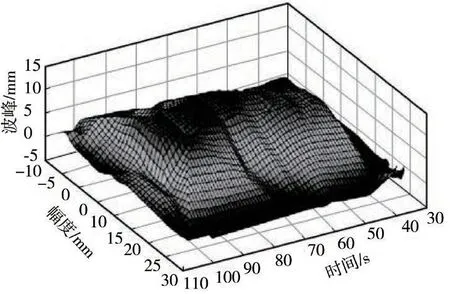
图4 本文方法的仿真结果
根据图3、图4对比分析结果可知,采用本文方法后,图像处理效果良好,噪声变化较平坦,处理结果的平滑性更优,表明按照图像预处理、传输线检测以及无人机空间定位的流程进行操作后,能够改善图像处理效果。滤波期间输入原始输电线路图,采用Sobel 检测器执行滤波操作,能够强化边缘效应,所得结果更具参考价值,说明图像过滤处理性能可靠。
为进一步检验本文算法对输电线路运行故障的检测性能,引入卷积神经网络优化YOLOv3模型和K-Means 聚类算法,根据平均精度O 判断各算法的性能。每个训练批次均包含10张图像,进行模型训练,损失函数在经过20h 的训练后不再表现出下降变化趋势。以2GB 输电线路图像为对象,采用本文方法和两种对比算法进行计算故障定位,训练次数均设为6次,确定各算法的平均精度O 值,结果见表1。
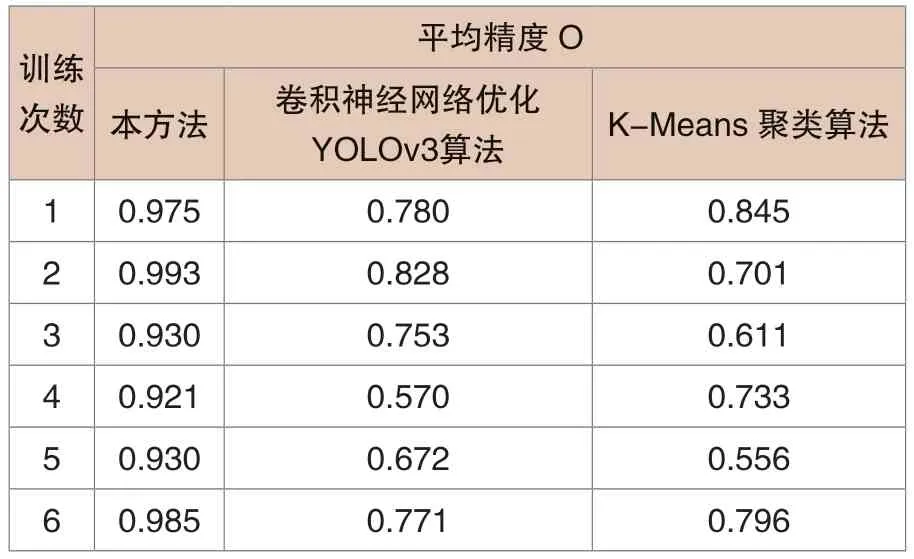
表1 各算法平均精度统计表
根据表2的对比数据可知,相同算法在不同训练次数时的平均精度O 各不相同,难以准确判断三种算法的优劣。基于此,向仿真软件中输入试验结果,根据各算法的准确性做进一步对比分析,进而检验各算法的性能,结果见表2。

表2 试验结果对比
根据表3的准确性统计结果可知,在试验次数为1次~6次时,本文方法的准确性均高于其他两种算法,在试验全过程中,本文方法的故障定位准确性最低为92%,最高为99%,均高于90%,且以第2次试验的准确性优势更为明显,远超过其他两种算法。各算法的准确性对比分析结果表明,本文算法在输电线路运行故障定位中具有良好的适用性,满足高精度、高效率的故障定位要求。
3 结语
综上所述,无人机在输电线路运行故障检测中的应用频率逐步提高,采用机器视觉立体测量技术,搭载卫星雷达,集软件和硬件的优势于一体,显著提高输电线路运行故障定位精度,并兼具安全、高效等特点,在复杂地形、交叉跨越等特殊情况下均能够有效定位输电线路运行故障。经过本文试验和对比分析,验证了输电线路运行故障无人机定位技术的有效性,在未来的技术发展中,相关人员需要进一步深化技术原理,积累经验,持续提高无人机技术在输电线路运行故障定位中的应用水平。
猜你喜欢
建材发展导向(2021年10期)2021-07-16 07:13:40
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
建材发展导向(2019年5期)2019-09-09 09:25:10
电子制作(2018年12期)2018-08-01 00:48:08
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
疯狂英语(双语世界)(2016年3期)2016-02-27 10:11:55
管理现代化(2016年5期)2016-01-23 02:10:11
学习月刊(2015年1期)2015-07-11 01:51:12
电测与仪表(2015年2期)2015-04-09 11:29:24