焊接机器人降低空闲损耗的方法研究
2024-06-03 05:45:03黄晓东李铮王凯
中国标准化 2024年5期
黄晓东 李铮 王凯
摘 要:焊接机器人的组成部分之一是焊接设备,而随着2019年10月1日欧盟发布的(EU)No 2019/1784《电焊机的生态设计要求》焊接设备空闲损耗概念的引进,焊接机器人也将迎来一次重大的技术革新。本文指出了空闲损耗状态对于焊接机器人的效率制约,从机械臂、控制系统、焊接设备、安全系统四个方面介绍了有效抵消空闲损耗的方法,其中焊接设备部分结合试验数据做了着重分析,从功率器件、主变压器磁芯、控制模块和冷却系统入手,找出了高功耗的原因,提出了相应的解决方案,对焊接机器人的绿色可持续发展有积极推动作用。
关键词:焊接机器人,空闲损耗,焊接设备,标准
DOI编码:10.3969/j.issn.1002-5944.2024.05.026
0 引 言
我国焊接机器人产业起步较晚,在焊接机器人减速器、传感器、控制器等核心技术领域与世界主要机器人生产国家美德日韩等还有很大差距。随着2023年1月欧盟(EU)No 2019/1784能效指令的强制实施,进入欧盟市场的弧焊电源必须满足空闲损耗不高于50W的指标要求[1],这对于我国焊接机器人工业发展起到了一定的制约效果,研究如何打破这种技术壁垒对于焊接机器人产业的长远发展势在必行。
焊接机器人的工作流程一般包括四个步骤。首先通过传感器系统感知焊接环境和工件状态对焊接材料特性做出合理选择;然后机器人控制系统根据预设的焊接参数规划机械臂的运动轨迹;接下来焊接设备通电,为机械臂执行焊接操作提供持续的能量输出;为确保焊接质量的稳定性[2],最后还需要通过控制系统的反馈和监控功能对整个焊接过程实时调整,形成闭环操作。本文按以上工作步骤,对每一个流程涉及到的软硬件进行了详细分解、认真分析,较全面地总结归纳了焊接机器人空闲状态时高功耗的原因和解决办法。
1 机械臂部分
机械臂是焊接机器人的骨骼和肌肉,它由多个关节连接而成,具有多自由度、柔性化[3]的运动能力。机械臂的空闲状态损耗相对较小,尤其是与实际焊接操作相比。其空闲状态下通常会有以下能量和资源的损耗。
(1)维持能耗。机械臂在空闲状态下仍需维持一定的电力供应,以保持其电子系统的运行和待命状态。
(2)热量散失。机械臂的电子元件和电机在运行过程中会产生一定的热量,即使在空闲状态下,机械臂仍需散发这些热量,以保持元件和电机的正常工作温度。
(3)气压损耗。某些焊接机器人的机械臂可能需要使用气压来驱动一些执行器或辅助设备。即使在空闲状态下,机械臂可能需要维持一定的气压供应,以保持这些设备的待命状态,这会导致气压的损耗。
为了最大程度地减少空闲状态损耗,本部分可以采取一些措施,如优化机械臂的待机模式、合理调整电力供应、定期维护和保养等,以提高能源利用效率和减少资源浪费。
2 控制系统
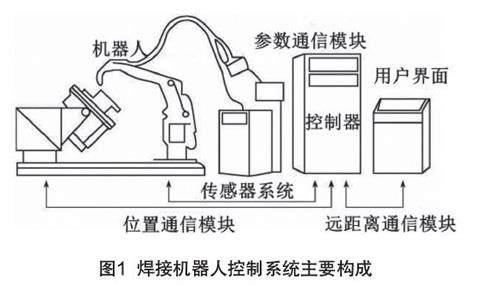
焊接机器人的控制系统是指用于控制和管理机器人的硬件和软件组件。它负责监控和调节机器人的运动、焊接参数和操作过程,以实现精确、平滑[4]的焊接操作。焊接机器人的控制系统通常由图1所示控制器、通信模块、传感器系统三个主要部分[5]构成。
(1)控制器。控制器是焊接机器人控制系统的核心部件,它负责接收和处理来自传感器和用户输入的信号,并控制机器人的运动和焊接操作。控制器通常包括硬件和软件两个组成部分,硬件部分包括主控板、输入输出接口等,用于接收和发送信号,软件部分包括控制算法、运动规划算法、路径规划算法[6]等,用于实现焊接任务的自动化控制。为减少空闲状态损耗,硬件部分可以采用功耗较小的主控板(如神经元芯片)取代传统高耗能芯片,接口用RS422串口代替RS232和RS485串口,既能实现高效率数据传输,又能解决RS485只能半双工的缺陷。软件部分则可以根据硬件的信息反馈,设计更精确的系统休眠和响应时间,工作时高效运行,空闲时迅速休眠。
(2)通信模块。建议用5G无线通信模块代替传统高能耗的CAN总线、LIN总线、Ethernet通信模式,实现高速率信息反馈的同时也极大地降低了线路传输带来的空闲状态损耗。
(3)传感器系统。传感器系统用于感知焊接环境和工件状态,以便控制系统能够做出相应的调整和决策。常见的传感器包括视觉传感器、力传感器、温度传感器等。视觉传感器可以用于检测焊缝位置和形状,力传感器可以用于检测焊接力度,温度传感器可以用于监测焊接过程中的温度变化。对空闲状态的准确感知是传感器系统实现低功耗的研究重点,相较于Honeywell霍尼韦尔传感器、Interface传感器,ABB传感器更加匹配焊接机器人复杂的传感器系统,不仅能实现实时控制,更能自动优化系统,实现控制系统的智能化。
3 焊接设备
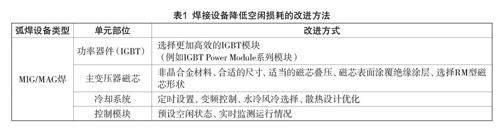
山东省产品质量检验研究院已于2022年底开展焊接设备的空闲损耗降低策略研究,项目结合了焊机能效标准GB 28736—2019和安全标准GB/ T15579.1—2013的试验方法,目前取得的成果如表1所示。
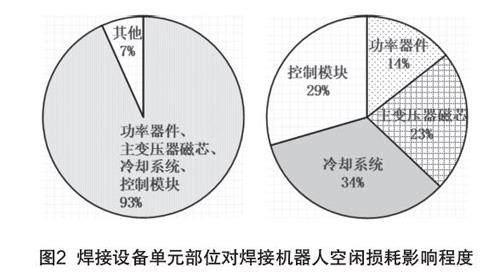
本部分研究按照实际情况进行了两组试验,第一组试验设置了其他影响单元和功率器件、主变压器磁芯、冷却系统、控制模块做为一个整体的影响单元,分析了四个单元部位做为整体对焊接机器人空闲损耗的影响程度。第二组试验对四个单元部位进行了分项研究,结果如图2所示。
试验数据显示,弧焊设备的功率器件、主变压器磁芯、冷却系统和控制模块是影响焊接机器人空闲损耗的四个主要因素,焊接设备要降低空闲状态损耗,按对焊接机器人整个系统空闲损耗贡献值从小到大可以采取以下措施。
(1)功率器件。应根据具体应用需求和设计要求进行评估和选择,在成本控制合理的基础上采购更加高效的IGBT模块,使弧焊设备空闲运行时功耗更低。
(2)主变压器磁芯。选择具有低磁滞和低损耗特性的磁芯材料,常见的磁芯材料包括硅钢片、铁氧体和非晶合金等,非晶合金材料具有更低的损耗;选择适当的磁芯形状,以最大程度地减少磁通漏磁和涡流损耗,不同形状的磁芯适用于不同的应用和功率級别;选择适当的磁芯尺寸;适当的磁芯叠压可以提高磁通密度,从而减少磁芯的尺寸和损耗;在磁芯表面涂覆绝缘涂层可以减少涡流损耗,绝缘涂层可以阻止涡流在磁芯表面形成,从而减少能量损耗。
(3)控制模块。采用智能控制系统来监测焊机的工作状态和温度,并根据实时需求调整冷却系统的运行,智能控制系统可以根据焊机的负荷和温度变化,自动调整冷却系统的运行速度和功耗,间接降低空载电流[7],避免过度冷却和能量浪费。
(4)冷却系统。使用更精确的温度传感器监测焊机的温度,并根据需要调整冷却系统的运行;采用变频控制技术来调节冷却系统的运行速度,根据焊机的工作负荷和温度需求,调整冷却系统的转速,以减少能耗;进行合理的散热设计,包括优化散热器的布局和尺寸,增加散热面积,改善热风道设计。
4 安全系统
焊接机器人的安全系统主要包括休眠模式、传感器监测、自动关机、强制关机四个部分,强制关机对整体的空闲损耗影响相对较小,可以做为省略项排除不作为研究内容,针对其他四个部分有以下几个方面的改进措施。
(1)休眠模式。将焊接机器人配置为具有休眠模式,当机器人处于空闲状态时,可以自动进入休眠模式,休眠模式可以通过降低电源供应、关闭部分电路或减少电机转速等方式实现。需要注意的是,在实际应用过程中,部分运维人员出于其他考虑不会开启休眠功能[8],应定期开展此方面培训,增强节能意识。
(2)传感器监测。使用传感器監测机器人周围的环境和工件状态。当机器人没有焊接任务时,传感器可以检测到是否有人员或物体靠近,以及工件是否准备好。根据传感器的反馈,可以决定机器人是否继续运行或进入休眠状态,保证工程时间及质量[9]的同时降低能耗。
(3)自动关机。当机器人连续一段时间没有进行焊接任务时,可以自动关机。通过设置自动关机功能,可以避免机器人长时间处于空闲耗能状态,减少能耗。
5 结 语
为满足焊接机器人正常焊接工作,空闲损耗的极大降低是本阶段解决整体损耗过高的主要关注点。通过对焊接机器人的机械臂、控制系统、焊接设备、安全系统四个方面进行分析研究,综合采取上述措施可以有效降低空闲状态的损耗,提高设备的效率和能源利用效率,减少资源浪费。在焊接机器人在实际应用中,工况更加多变且环境具有不确定性,应根据具体需求和设计要求,选择适当的措施和技术,实现最佳的能耗和功耗优化效果。
参考文献
[1]Ecodesign requirements for welding equipment pursuant:(EU)No 2019/1784[S].
[2]吴海州. 焊接机器人技术发展探究[ J ] . 内燃机与配件,2023(20):93-95.
[3]曹正.焊接机器人的发展现状和机器人焊接质量控制[J].现代制造技术与装备,2023,59(8):154-156.
[4]姚宇,张秋菊,陈宵燕,等.复杂空间曲面焊接机器人自动编程系统[J].焊接学报,2023,44(5):122-128.
[5]霍厚志,杨朔,刘龙飞,等.我国焊接机器人应用现状及关键技术概述[J].焊管,2023,46(5):1-7+28.
[6]刘徐.智能化焊接机器人的技术分析[ J ] .集成电路应用,2022,39(9):308-309.
[7]王玮,陈会岭,潘小燕,等.电焊机节能装置的设计[J].机电产品开发与创新,2012,25(3): 56-57.
[8]梁露露, 刘强, 刘绚,等.低负载率下数据中心模块化UPS的智能休眠技术研究[J ].电信工程技术与标准化2023,36(z1):84-88.
[9]吴超,崔莹莹,杨瑞,等.基于能力模型的管道环焊缝缺陷修复制约因素分析及建议[J].科技和产业,2020,20(10):209-213.
作者简介
黄晓东,本科,工程师,研究方向为电焊机、电机及其他电气产品的质量检测与标准。
(责任编辑:袁文静)
猜你喜欢
城市道桥与防洪(2022年4期)2022-07-01 06:04:12
锻压装备与制造技术(2021年3期)2021-08-13 08:40:00
制造技术与机床(2019年10期)2019-10-26 02:47:22
当代陕西(2019年8期)2019-05-09 02:22:48
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:23:10
亚太教育(2016年31期)2016-12-12 08:50:27
设备管理与维修(2016年5期)2016-03-16 02:20:41
专用汽车(2016年4期)2016-03-01 04:13:43
焊接(2016年7期)2016-02-27 13:05:07
机械制造文摘·焊接分册(2015年5期)2016-02-02 00:56:11