基于改进涡流搜索算法的外骨骼迭代学习控制
2024-05-24 13:18钟佩思张大卫张超王晓
计算机应用研究 2024年3期
关键词:参数优化
钟佩思 张大卫 张超 王晓


摘 要:
为提升康复外骨骼机器人的步态跟踪性能,提出一种基于改进涡流搜索算法的迭代学习控制方法。首先针对传统迭代学习控制抗扰性差和控制信息缺失问题,引入PD控制器、自适应遗忘因子、误差过渡曲线和控制信息搜索等策略,改进迭代学习控制律;其次,基于多种策略对涡流搜索算法进行改进,提出了一种改进涡流搜索算法,改进后的算法可优化迭代学习控制的PD参数;最后進行行走实验,将提出的迭代学习控制方法与现有的同类算法进行仿真和数值比较,并测试了扰动情况下的跟踪性能。实验结果表明,所提方法的误差更小,跟踪性能更强。该算法改进了迭代学习控制的不足,具有较强的抗扰性能,保证了使用时的稳定性。
关键词:迭代学习控制;涡流搜索算法;步态跟踪;外骨骼机器人;轨迹过渡;参数优化
中图分类号:TP242.6 文献标志码:A 文章编号:1001-3695(2024)03-034-0873-07doi: 10.19734/j.issn.1001-3695.2023.07.0316
Iterative learning control of exoskeleton based on improved vortex search algorithm
Zhong Peisi, Zhang Dawei, Zhang Chao, Wang Xiao
(Advanced Technology Research Center, Shandong University of Science & Technology, Qingdao Shandong 266590, China)
Abstract:
In order to improve the gait tracking performance of the rehabilitation exoskeleton robot, this paper proposed an iterative learning control method based on improved vortex search algorithm. Firstly, for the problems of poor immunity and missing control information of traditional iterative learning control, it introduced strategies such as PD controller, adaptive forgetting factor, error transition curve and control information search to improve the iterative learning control law. Secondly, it proposed an improved vortex search algorithm based on multiple strategies, and the algorithm could optimize the PD parameters of iterative learning control. Finally, it simulated and numerically compared the proposed iterative learning control method with existing similar algorithms on walking experiments, and test the tracking performance under perturbation. The experimental results show that the proposed iterative learning control method has smaller error and stronger tracking performance. The algorithm improves the shortcomings of the iterative learning control, has strong anti-interference performance, and ensures stability in use. Key words:iterative learning control; vortex search algorithm; gait tracking; exoskeleton robot; trajectory transition; para-meter optimization
0 引言
肢体康复训练是下肢残疾患者恢复肢体功能的主要方法。临床实验表明,通过康复外骨骼机器人代替人工训练可以提升训练精度、提高效率[1]。在恢复前期,病患不能自主地进行康复训练,这一时期被称为被动康复阶段,应遵循“机主人辅”原则,即通过外骨骼机器人牵引病肢进行重复的康复训练[2]。
基于训练的重复性,可将迭代学习控制(iterative learning control,ILC)作为外骨骼机器人控制方法。迭代学习控制适用于重复执行同一任务的被控系统,其目标是通过不断迭代,最终实现对参考轨迹的精确跟踪,其不依赖精确的系统数学模型,适应性强,易于实现,已被应用于工业机械臂[3]、轮式机器人[4]和康复外骨骼机器人[5,6]。但由于系统误差和外界扰动的存在,迭代学习控制存在初值偏离期望值,迭代长度不一的缺点,造成控制信息缺失,降低了控制性能,且迭代学习控制属于前馈控制,抗扰动性较差。
针对控制信息缺失问题,Zhuang等人[7]采用逐次投法设计了随机变长度控制律,相比于传统迭代学习控制提高了收敛精度,但无法保证系统的抗扰性和鲁棒性。Zeng等人[8]提出一种初值校正机制,放宽了初值一致条件,并实现了机械臂的精确跟踪,但需要在每次迭代中重新设计过渡轨迹,运算量较大。针对抗扰性差,戴宝林等人[9]提出一种带遗忘因子的迭代学习控制方法,并引入了最优化理论,计算出最优控制增益,但其使用了固定的遗忘因子,抗扰动能力欠佳。张长胜等人[10]提出一种基于改进狼群算法的自适应迭代学习策略,通过狼群算法来优化控制律的参数,有效降低了机械臂的跟踪误差,但误差的收敛速度较慢。安欣等人[11]通过粒子群算法优化控制律参数,减少了迭代次数,提高了地震波的复现精度,但对于粒子群算法的改进较少,当控制系统扰动较强或粒子群算法陷入局部最优时可能无法获取最佳参数。
综上所述,迭代学习控制的改进应以避免控制信息缺失问题和增强抗扰性为目的,并设计性能较强的优化算法对控制律参数进行寻优,以降低控制误差。为此,本文通过引入PD控制器、自适应遗忘因子、过渡曲线和控制信息搜索等策略改进了控制律,以提升抗扰性,弥补信息缺失;并基于Doan等人[12]提出的涡流搜索算法(vortex search,VS),通过建立新的候选解生成、半径更新和圆心调整机制,提出一种改进涡流搜索算法(improved vortex search algorithm,IVS),将改进后的算法应用于控制律增益参数优化,以提升控制效果。
2 改进涡流搜索算法
涡流搜索算法的原理是通过嵌套圆来模拟涡流采样策略。迭代开始前,计算初始圆心位置和初始半径。迭代开始后,涡流搜索算法通过高斯分布产生候选解,代入目标函数求得每次迭代的适应度,在每次迭代结束后将最优解作为下次迭代的圆心,并更新搜索半径[12]。涡流搜索算法的优点是参数较少,易于实现,但涡流搜索算法只通过高斯分布产生候选解,易陷入局部最优,且易提供收敛速度慢、精度低的解。本文通过改进候选解的生成、半径更新和圆心调整等策略,进一步提升优化性能。
2.1 候选解生成策略
良好的初始解生成机制可有效避免优化算法易陷入局部最优,本文提出一种基于Hammersley点集采样的候选解初始化策略。Hammersley点集基于Van der Corput序列变换而来,其优点是易于实现,且分布均匀性强于Halton序列和普通随机数序列[16],缺点是无法扩展,只能生成固定数目的样本,因此适合用于候选解的初始化策略。
研究表明,引入Lévy飞行可以更有效地探索全局空间[17]。在候选解的生成机制中引入Lévy飞行策略,在迭代前期通过Lévy飞行更新候选解,增强其全局搜索能力;当适应度满足一定条件后,通过高斯分布更新候选解,保证其局部搜索能力。具体实现形式如式(11)所示。
3 实验验证
3.1 IVS算法性能评估
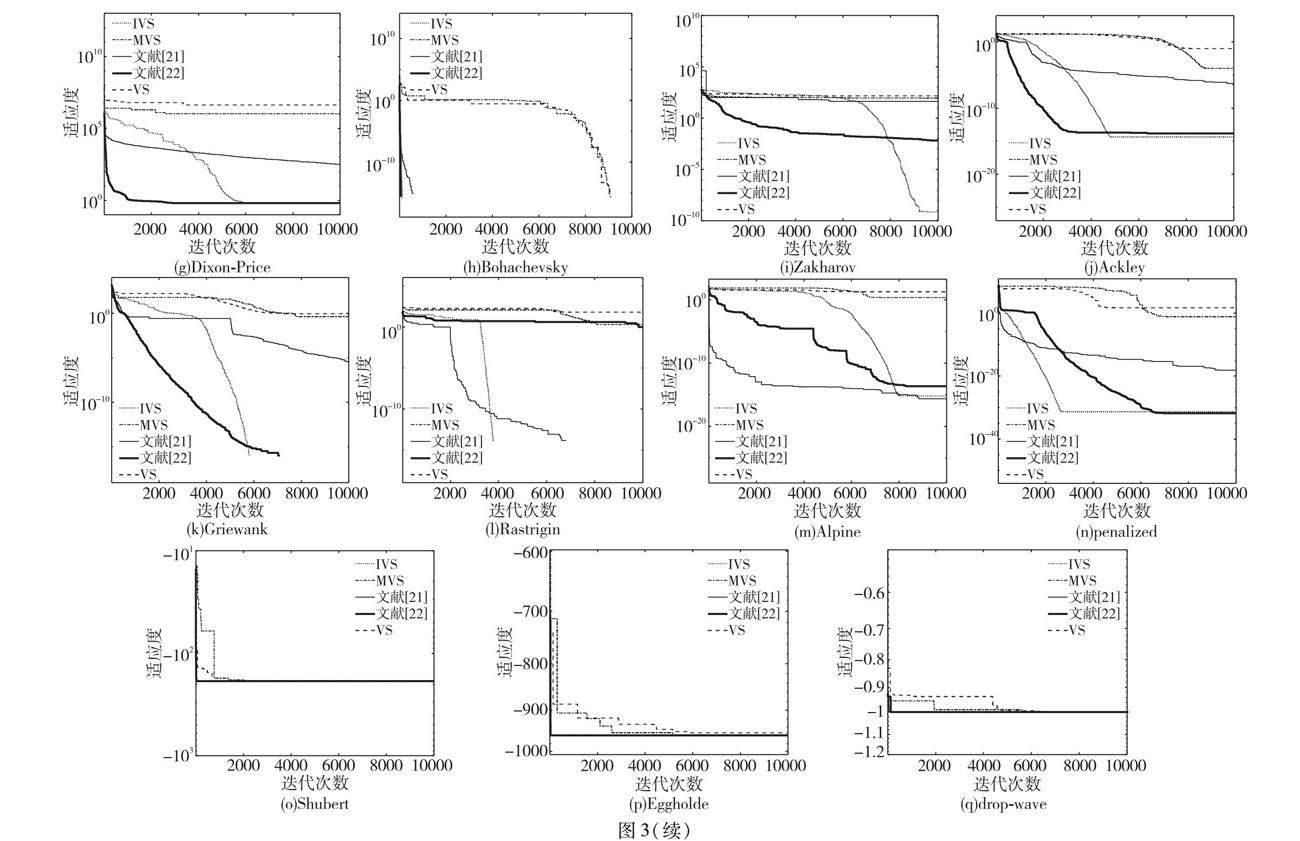
为了评估IVS算法的性能,本文使用了17个基准测试函数,包括9个单峰函数和8个多峰函数,选取标准VS算法、MVS算法[20]、文献[21,22]作为对比算法。设定种群数为50,最大迭代次数为10 000次,维度均为30维。绘制上述五种算法在17个基准函数的适应度变化,如图3所示。保持参数设置不变,五种算法在每个函数上独立运行30次,表1和2展示了各算法在单峰和多峰函数下的寻优结果。
由图3可知,IVS的收敛速度相较传统VS更快,但在多数函数上弱于MVS和文献[21]。由表1和2可知,IVS相较其他算法有着更高的收敛精度和更小的标准差。在sphere、Beale、Bohachevsky、Griewank、Rastrigin、Shubert、Eggholder和drop-wave函数上,IVS均收敛至最优,且在多数函数中以较少迭代次数收敛。综上,IVS相较于对比算法具有收敛精度高,寻优效果稳定和适用性强的优势。
3.2 控制效果评估
为验证本文算法在实际应用中的控制效果,通过外骨骼机器人进行了行走实验,如图4所示。
外骨骼机器人通过PC机作为上位机,进行控制程序编写、数据传输和指令发送,各关节角度变化由姿态传感器MPU6050测得并传至PC机。数据预处理后,拟合得到四个关节在1 s内的角度变化曲线,将其作为期望曲线,如式(17)所示。
其中:q1、q2、q3、q4分别为拟合得到的左膝、右膝、左髋和右髋关节的期望关节曲线。
选取文献[23,24]与本文算法进行跟踪性能对比。文献[23]为传统PD型迭代学习控制,与本文改进PD型迭代学习控制对比,以突出本文算法的性能优势;文献[24]则为一种新型迭代学习控制算法,将本文算法与之对比,以体现本文算法在同类迭代学习控制算法中的优势。两者实现形式如式(18)(19)所示。文献[24]高阶参数α1=1.2、α2=-0.1、α3=-0.1,初值取10,其他控制参数设置如表3所示。其中本文算法增益系数由IVS算法优化得出,需设置范围。IVS种群数取50,优化算法迭代次数取100。左膝、右膝、左髋和右髋的控制输入初值u0均取0。
对每个时间变量的误差取绝对值,从绝对值中取最大值作为当代最大误差。下肢关节的误差变化如图5所示。
本文算法在图5中存在采样点缺失,这是由于该采样点时刻误差极小,已接近或等于0,其原理等同于图3中测试函数适应度收敛至0后,后续采样点数据缺失。由图5可知,文献[23]误差最大,且存在波动;相比其他两种算法,本文算法跟踪精度在四种关节曲线上更高,在采样点缺失时刻实现了轨迹的精确跟踪。
为验证本文算法对突发外界干扰的鲁棒性和响应能力,对轨迹曲线施加扰动项,扰动项为基于Tent混沌映射产生的介于(-4,4)的随机值,跟踪效果如图6所示。
迭代学习控制效果取决于能否在较少代数内实现低误差。由图6可知,第5次迭代时误差较大,到第10次迭代时已基本实现良好的轨迹跟踪,到第20次迭代已可以准确跟踪期望曲线,说明当存在外界干扰时,控制系统能迅速响应,消除其带来的误差,以起到对穿戴者保护的作用。
在實际情况下,扰动通常伴随整个行走过程。本文以左膝和左髋为实验对象,在期望曲线中加入均值为0,标准差为0.5的高斯分布噪声干扰项,跟踪效果如图7所示。由图7可知,在整个行走周期内加入噪声干扰后,本文算法跟踪误差在较少代数内依然能收敛至较低值。左膝最大误差在第5次迭代为5.34,在第20次迭代为0.005 2;左髋最大误差在第5次迭代为1.89,第20次迭代为0.002 9。其中左膝在迭代次数较少时出现误差波动,当迭代次数增大后,误差波动逐渐消失,保证了外骨骼机器人运作时的安全性和鲁棒性。
4 结束语
本文针对传统迭代学习控制抗扰性差、初值误差和时间间隔不定等问题,改进了控制律,加入了PD控制器和遗忘因子,设计了过渡曲线和搜索机制,并基于改进的候选解更新策略、半径更新策略和圆心变异策略,设计了IVS算法,将其应用于PD控制器的参数寻优,提出了一种新的迭代学习控制方法,并用于外骨骼的步态跟踪。本文选取了几种目前已有的改进涡流算法与IVS进行对比,仿真结果表明,IVS的优化性能优于同类算法;本文亦选取了几种已有的迭代学习控制方法予以对比,证明了本文算法的跟踪性能更强。但不足的是IVS本身仍存在如传统VS算法类似的收敛速度慢的问题,未来可通过种群分组寻优等策略以加快收敛速度,从而提高其在实际工程问题中的效率。
参考文献:
[1]Azocar A F,Rouse E J. Characterization of open-loop impedance control and efficiency in wearable robots [J]. IEEE Robotics and Automation Letters,2022,7(2): 4313-4320.
[2]刘泉,谢先亮,孟伟,等. 柔性脚踝康复机器人自适应迭代学习控制 [J]. 华中科技大学学报: 自然科学版,2023,51(5): 53-59. (Liu Quan,Xie Xianliang,Meng Wei,et al. Adaptive iterative lear-ning control of flexible ankle rehabilitation robot [J]. Journal of Huazhong University of Science and Technology: Natural Science Edition,2023,51(5): 53-59.)
[3]Shi Huihui,Chen Qiang. Error-tracking iterative learning control for the constrained flexible-joint manipulator with initial errors [J]. Sustainability,2022,14(19): 12453.
[4]游东亚,崔立志,卜旭辉,等. 轮式机器人纵向滑移迭代学习轨迹跟踪控制 [J]. 电光与控制,2022,29(9): 96-101. (You Dongya,Cui Lizhi,Bu Xuhui,et al. Longitudinal slippage iterative learning trajectory tracking control of wheeled robots [J]. Electro-nics Optics & Control,2022,29(9): 96-101.)
[5]胡鸿越,胡立坤,刘贻达,等. 一种柔性下肢外骨骼控制策略研究 [J]. 仪器仪表学报,2020,41(3): 184-191. (Hu Hongyue,Hu Likun,Liu Yida,et al. Control method for the soft lower limb exosuit [J]. Chinese Journal of Scientific Instrument,2020,41(3): 184-191.)
[6]Kun Qian,Li Zhenhong,Zhang Zhiqiang,et al. Data-driven adaptive iterative learning control of a compliant rehabilitation robot for repetitive ankle training [J]. IEEE Robotics and Automation Letters,2022,8(2): 656-663.
[7]Zhuang Zhihe,Tao Hongfeng,Chen Yiyang,et al. Iterative learning control for repetitive tasks with randomly varying trial lengths using successive projection [J]. International Journal of Adaptive Control and Signal Processing,2022,36(5): 1196-1215.
[8]Zeng Chun,Shen Dong,Wang Jinrong. Adaptive learning tracking for robot manipulators with varying trial lengths [J]. Journal of The Franklin Institute,2019,356(12): 5993-6014.
[9]戴宝林,龚俊,李翠明. 带遗忘因子迭代学习控制最优增益研究 [J]. 西北工业大学学报,2019,37(5): 1077-1084. (Dai Baolin,Gong Jun,Li Cuiming. Optimal gains of iterative learning control with forgetting factor [J]. Journal of Northwestern Polytechnical University,2019,37(5): 1007-1084.)
[10]张长胜,马泽楠,李宽,等. 改进狼群算法的SCARA机械臂自適应迭代学习控制 [J]. 机械科学与技术,2020,39(8): 1177-1183. (Zhang Changsheng,Ma Zenan,Li Kuan,et al. Adaptive iterative learning control of SCARA manipulator with improved wolf pack algorithm [J]. Mechanical Science and Technology for Aerospace Engineering,2020,39(8): 1177-1183.)
[11]安欣,高峰,杨巧玉,等. 基于前馈补偿的振动台粒子群迭代学习控制算法 [J]. 振动与冲击,2022,41(1): 213-220. (An Xin,Gao Feng,Yang Qiaoyu,et al. PSO iterative learning control algorithm for shaking table based on feedforward compensation [J]. Journal of Vibration and Shock,2022,41(1): 213-220.)
[12]Doan B,lmez T. A new metaheuristic for numerical function optimization: vortex search algorithm [J]. Information Sciences,2015,293: 125-145.
[13]王文东,肖孟涵,孔德智,等. 基于人机耦合模型的上肢康复外骨骼闭环PD迭代控制方法 [J]. 机械工程学报,2021,57(21): 11-21. (Wang Wendong,Xiao Menghan,Kong Dezhi,et al. Closed-loop PD iterative control method for upper limb rehabilitation exoskeleton based on human-robot coupling model [J]. Journal of Mechanical Engineering,2021,57(21): 11-21.)
[14]陈强,陈凯杰,施卉辉,等. 机械臂变长度误差跟踪迭代学习控制 [J]. 自动化学报,2023,49(12): 1-11. (Chen Qiang,Chen Kaijie,Shi Huihui,et al. Error tracking iterative learning control for robot manipulators with varying iterative lengths [J]. Acta Automatica Sinica,2023,49(12): 1-11.)
[15]Li Xuefang,Shen Dong. Two novel iterative learning control schemes for systems with randomly varying trial lengths [J]. Systems & Control Letters,2017,107: 9-16.
[16]Wu Chenxi,Zhu Min,Tan Qinyang,et al. A comprehensive study of non-adaptive and residual-based adaptive sampling for physics-informed neural networks [J]. Computer Methods in Applied Mechanics and Engineering,2023,403: 115671.
[17]Wang Wenchuan,Xu Lei,Chau K,et al. Cε-LDE: a lightweight va-riant of differential evolution algorithm with combined ε constrained method and Lévy flight for constrained optimization problems [J]. Expert Systems with Applications,2023,211: 118644.
[18]Liu Jingsen,Li Haoran,Li Yu,et al. An enhanced vortex search algorithm based on fluid particle density transfer for global and engineering optimization [J]. Applied Soft Computing,2023,135: 110024.
[19]Gao Yong,Zhang Hao,Duan Yingying,et al. A novel hybrid PSO based on levy flight and wavelet mutation for global optimization [J]. PLoS One,2023,18(1): e0279572.
[20]李學贵,郭远涛,李盼池,等. 基于改进涡流搜索算法的支持向量机分类模型 [J]. 吉林大学学报: 信息科学版,2020,38(3): 312-318. (Li Xuegui,Guo Yuantao,Li Panchi,et al. Classification model of support vector machine based on modified vortex search algorithm [J]. Journal of Jilin University: Information Science Edition,2020,38(3): 312-318.)
[21]Toz M. Chaos-based vortex search algorithm for solving inverse kinematics problem of serial robot manipulators with offset wrist [J]. Applied Soft Computing,2020,89: 106074.
[22]Gharehchopogh F S,Maleki I,Dizaji Z A. Chaotic vortex search algorithm: metaheuristic algorithm for feature selection [J]. Evolutionary Intelligence,2022,15(3): 1777-1808.
[23]Dong Jian,He Bin,Zhang Chenghong,et al. Open-closed-loop PD ite-rative learning control with a variable forgetting factor for a two-wheeled self-balancing mobile robot [J]. Complexity,2019,2019: 5705126.
[24]Ai Qingsong,Ke Da,Zuo Jie,et al. High-order model-free adaptive iterative learning control of pneumatic artificial muscle with enhanced convergence [J]. IEEE Trans on Industrial Electronics,2019,67(11): 9548-9559.
猜你喜欢
电脑知识与技术(2016年31期)2017-02-27
筑路机械与施工机械化(2016年11期)2017-02-05
科教导刊·电子版(2016年30期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
科技视界(2016年23期)2016-11-04
计算技术与自动化(2015年4期)2016-03-25
哈尔滨理工大学学报(2015年5期)2016-01-19
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年12期)2015-06-15