建立安全换道域的换道决策与规划
2024-05-23 08:33:53汪海松胡明辉黎万洪曹开斌
重庆大学学报 2024年3期
关键词:交通安全
汪海松 胡明辉 黎万洪 曹开斌


收稿日期:2022-01-11
网络出版日期:2022-05-16
基金项目:国家自然科学基金资助项目(52072053);国家重点研发计划项目(2018YFB0106100)。
作者简介:汪海松(1997—),男,硕士研究生,主要从事智能汽车路径规划与决策研究,(E-mail) 20162306@cqu.edu.cn。
通信作者:胡明辉,男,教授,博士生导师,(E-mail)minghui_h@163.com。
摘要:局部路径规划强调在微观交通场景中输出一条可行驶路径,对每一离散时刻的路径点都要求有极高的安全性和舒适性。现有的局部路径规划方法中鲜有考虑路径曲率是否连续、路径起讫点约束等物理特性的基于安全换道域的换道决策与规划方法。本研究中对典型的换道场景建立了临界安全换道角模型,对无法演变为单障碍车换道场景的双障碍车换道场景建立了安全换道域。对比了几种常用换道路径,筛选出B样条曲线法作为局部路径规划方法,利用换道时间和换道路径平均曲率确定基于安全换道域的最优换道路径,并提出了基于安全换道域的换道决策,联合Simulink和PreScan计算平台在典型换道场景下实现了所提出的换道策略的仿真验证。结果表明,所提出的换道决策和换道路径规划能够实现本车的安全换道。
关键词:交通安全;安全换道域;运动规划;规则换道决策
中图分类号:U491 文献标志码:A 文章编号:1000-582X(2024)03-016-14
换道是日常驾驶过程中常见的行为,它是驾驶员根据周围车辆的车速、车辆间距等信息综合作出的非量化决策,比跟驰行为更复杂,更容易引发交通事故和道路堵塞[1-2]。随着自动驾驶汽车的蓬勃发展,建立一个安全、准确的换道轨迹规划模型逐渐成为研究重点[3-4]。
换道决策模型可分为基于马尔科夫过程和基于规则的换道模型。Worrall等[5]于1970年首先提出基于马尔科夫过程的车辆换道模型,将随机换道行为看作同质的马尔科夫链:未来的换道决策只与当前车辆所处的交通环境有关,而与车辆的历史状态信息无关。丁杨等[6]提出一种基于高斯混合隐马尔科夫模型(Gaussian mixture model-hidden Markov model,GMM-HMM)和人工神经网络(artificial neural network,ANN)的紧急换道行为预测方法。首先利用GMM-HMM模型辨别驾驶员的换道行为,然后采用ANN预测下一时段的驾驶行为,最后再预测换道过程中的横向加速度变化率,从而判断紧急换道的危险程度。1986年,Gipps[7]提出第一个基于规则的换道模型,将障碍物、专用车道等因素归纳为具有一系列固定因素的决策树,这些固定因素被设计成一个规则集;在换道过程中,根据重要程度对每一个规则依次进行评估,最终输出是否进行换道行为。Balal等[8]基于模糊规则提出一种二元模糊推理系统来模拟高速公路上车辆的换道行为,并用NGSIM(Next Generation Simulation)数据集对模型进行了测试和验证。李娟等[9]将相对速度、间距、最迟换道距离和驾驶员性格等4个因素作为模糊推理系统的输入变量,以换道支持度为输出变量,建立了3种不同的换道规则,并以此来构建模糊推理换道模型。
换道路径规划方法主要有人工势场法和曲线拟合法。Khabit[10]于1985年首次提出人工势场法。Malone等[11]在机器人路径规划中建立虚拟力场模型,并产生随机的点集,将点相连作为优化路径。Golan等[12]引进温度场的概念,并定义障碍物温度高、目标温度低,通过对温度场求梯度实现机器人的路径规划。唐志荣等[13]利用椭圆化距离代替传统斥力势场中的实际距离,引入道路边界斥力场模型,从而在较小车道空间内获得汽车避撞局部路径。陈虹等[14]在划分车道可行区域基础上,以区域虚拟力场进行动态交通场景模拟,然后结合划分的车道区域确定各虚拟力场的作用区域。人工势场法规划的局部路径一般未考虑行驶曲率是否超限、曲率是否连续等物理条件,也没有考虑到沿着路径运行时的舒适性等要求。曲线拟合法通过在道路上选取关键点,利用曲线拟合函数,生成局部路径曲线。Park等[15]使用五次多项式曲线生成平滑路径,并利用数值优化方法优化该曲线;Zhou等[16]将3次多项式函数作为换道轨迹,但其平滑性不好;裴红蕾[17]和任玥等[18]采用五次多项式曲线獲得平滑路径;Hossein等[19]利用贝塞尔曲线插值方法,获得车辆避障路径;由于贝塞尔曲线控制灵活性较差,且不容易局部修改;Berglund等[20]通过用n次B样条基函数更换伯恩斯坦基函数改进了贝塞尔曲线,该曲线被称为B样条曲线,并应用在自动驾驶汽车的路径规划上。
针对当前研究现状,本研究聚焦于在直线道路场景下所有通行车辆均保持道路中线匀速行驶时的最优换道路径规划方法,从安全性、舒适性等方面着手,分析了典型的2种换道场景,分别建立对应的临界安全换道角模型;对比了多项式曲线、Dubins曲线、正弦曲线及B样条曲线等曲线的曲率、起讫点约束性等物理特性,筛选了B样条曲线法作为局部路径规划方法,结合安全换道角的概念提出了基于安全换道域的最优换道路径规划方法;设定了典型换道场景,并利用Simulink和PreScan实现了自动驾驶的场景仿真。
1换道场景分析
根据行车道和超车道的车辆分布数量可以初步分为单障碍车换道场景和双障碍车换道场景。
1.1单障碍车换道场景分析
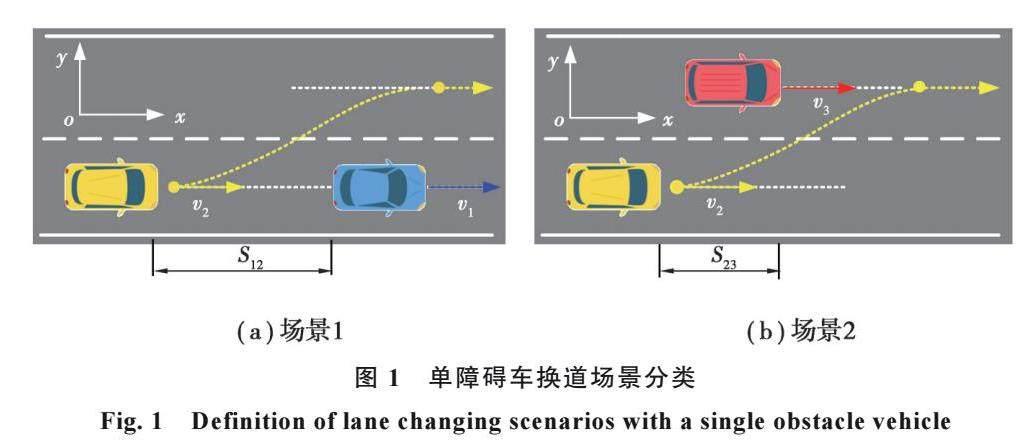
在可视范围内当本车道或目标车道仅有一辆障碍车时,称为单障碍车换道场景,如图1所示的2种换道场景,黄车为本车,蓝车和红车为障碍车,换道场景的相关定义见表1。
图1中的白色细虚线代表车道中心线,黄色虚线代表换道参考路径,2个黄色圆点表示本车的换道起点或终点,分别称为换道点和并道点。图(a)表示黄车和蓝车位于同一车道,黄车换道点距离蓝车距离为;图(b)横向上红车位于超车道(即黄车的换道目标车道),纵向上当黄车的换道点位于红车的后方时定义为正,反之为负。
1.2双障碍车换道场景分析
当本车道和目标车道各有一辆障碍车时,称之为双障碍车换道场景,如图2所示。
双障碍车就是场景1和场景2两种单障碍车换道场景的复合,黄车与红车、蓝车的相对位置()及3辆车的行车速度()大小关系对黄车的换道决策影响极大。分析可知,当蓝车和红车速度不等时,黄车总能通过一定的換道预操作(如加速、减速、匀速跟驰)将双障碍车换道场景演变为场景1或者场景2单障碍车换道场景;而当蓝车和红车速度相等时,黄车的换道空间仅取决于此时的和,尽管无法演变为单障碍车换道场景,但仍能参考场景1和场景2的结果做进一步研究。
2换道角及安全换道域
2.1单障碍车换道角建模
图3为场景1中的黄车与蓝车角碰示意图,为计算方便,将黄车的换道路径近似处理为一条直线。设置图中所有车辆的长度L为4 728 mm,宽度W为1 845 mm;所有车道宽度d为3.5 m。
设黄车换道点为A,沿着AC直线换道,定义换道角。当行驶至C点后,若黄车与行驶了路程后到达B点的蓝车的左后方刚好发生角碰,此时称![]() 为最小临界安全换道角。
为最小临界安全换道角。
据此,可得黄车从开始变道到刚好发生角碰的所经历的时间为
同样地,在类似场景2的单障碍车换道场景中,只要给定,均能绘制如图4所示的最大临界安全换道角曲面,然后通过和便可插值求得最大临界安全换道角,且通过适当减小换道角即可实现安全换道。临界安全换道角其余变化规律与场景1相似,不再赘述。
2.2安全换道域
针对场景1和场景2两种场景建立的临界安全换道角模型,适用于单障碍车换道场景或者可以演变为单障碍车换道场景的双障碍车换道场景。对于无法演变为单障碍车换道场景的双障碍车换道场景,则可以将2种临界安全换道角模型相结合,如图5所示。
根据和插值获得最小临界安全换道角,根据和可以插值获得最大临界安全换道角。那么只要实际换道角介于与之间,即可保证安全换道,故定义图5所示△ABC黄色区域为安全换道域。
然而,在安全换道角建模中,黄车在换道点后的换道轨迹被处理为沿着某直线行驶,这将导致车辆行驶至该换道点后,航向角从0突变为,同时车辆到达并道点后航向角又从突变为0。考虑到车辆的换道过程是一个连续时变过程,故这在实际中是无法实现的。因此,在所建立的安全换道域理论框架基础上,有必要进一步研究适合车辆行驶的安全换道路径曲线。
3基于安全换道域的换道路径规划
3.1B样条曲线的定义
B样条曲线基于贝塞尔曲线发展而来,具有连续性、凸包性等多种优良性质。设有一共n+1个控制点,这些控制点用于定义样条曲线的走向和界限范围。k阶B样条曲线的定义为
当阶数k>1时,k阶B样条基函数是由2个k-1阶的B样条基函数构成,当时,由于是常数,故是关于u的一次函数。照此规律,k阶B样条基函数![]() 是一个关于u的k-1次函数。涉及到一共k+1个节点,k个区间,因此从到共涉及一共n+k+1个节点,即节点向量为
是一个关于u的k-1次函数。涉及到一共k+1个节点,k个区间,因此从到共涉及一共n+k+1个节点,即节点向量为
根据节点值的大小变化关系,可以进一步将B样条曲线分为均匀B样条曲线、准均匀B样条曲线及分段贝塞尔曲线。其中,当两端节点具有重复度k,如,则为准均匀B样条曲线,由于准均匀B样条曲线具有更加优良的性质,其用途最为广泛。
B样条曲线是贝塞尔曲线的推广,两者之间的区别在于所使用的基函数不同。以Bernstein基函数构造的贝塞尔曲线有许多优点,但是仍有不足:1)贝塞尔曲线或曲面不能做局部修改,控制多边形的一个顶点发生变化,整条贝塞尔曲线的形状便会发生变化;2)控制性较差,当控制顶点较多时,曲线的阶次较高,控制多边形对曲线的控制将明显减弱;3)虽然可以进行曲线的拼接,但是贝塞尔曲线的拼接比较复杂。B样条曲线克服了贝塞尔曲线的缺点,B样条曲线具有基函数可选择性和局部可修改性,当改变某一个顶点时不会对整条曲线的形状产生影响,具有很好的局部调节作用,而且克服了贝塞尔曲线的光滑拼接复杂的问题,B样条曲线的斜率是连续变化的,曲线非常平滑。
3.2换道路径类型筛选
换道过程所涉及的局部路径规划方法多种多样,常见的局部路径规划方法有多项式插值曲线法、Dubins曲线法、正弦曲线法、基于貝塞尔曲线法发展的B样条曲线法等。前文中已经设定黄车在换道过程中速度保持恒定,在筛选换道路径类型时,仅从路径本体讨论不同路径类型的优劣。一般来说,有以下2个要求。
1)路径曲率的倒数是车辆在该点的转弯半径。车辆在行驶过程中,方向盘只能连续渐变,不能突变,这要求路径曲率连续变化,无突变情况。
2)在车辆的换道点和并道点处,要求路径在两点的切线与车道中心线平行,以保证车辆在两点的速度方向平行于车道中心线。此外,还要求路径在两点的曲率为0,以保证此时方向盘位于原位。
图6为场景1的局部路径规划示意图。以A点(0,-1.75)为换道点,B点(50,1.75)为并道点,建立模拟换道场景,分别利用五次多项式曲线等4种局部路径规划方法得到4种局部路径及路径曲率,如图7所示。
1)五次多项式曲线同时满足了首末点曲率为0和曲率连续变化的要求。但五次多项式曲线同时规划了路径和速度信息,若考虑周边车辆的未来路径对本车的路径规划影响,则较难将这种影响量化为约束表达式,不易求得多项式系数,也就无法快速求解路径。
2)Dubins曲线的路径曲率出现了2次跳变。若车辆跟随该路径行驶,则要求车辆行驶到C点后立刻停车,然后将方向盘回正,当继续行驶到D点后又立刻停车,并将方向盘转到满足圆弧段转弯半径的角度后,再继续行驶。显然,Dubins换道路径并不符合实际行驶要求。
3)正弦曲线换道路径的路径曲率满足了连续变化的要求,但在换道点和并道点的曲率不为0,将导致车辆行驶至并道点后方向盘未在原位,后续将偏离车道中心线。故正弦曲线换道路径也不符合实际行驶要求。
4)B样条曲线几近完美地规避了上述几种换道曲线的缺陷,又保留了它们的优势,是较为理想的一种换道路径类型。
一般来说,B样条曲线的次数越低,样条曲线逼近控制点效果越好;次数越高,则曲线的导数次数也较高,那么将有很多零点存在,较多的导数零点导致原曲线存在较多的极值,使曲线出现较多的峰谷值。三次准均匀B样条曲线能够实现二阶导数连续,是最为理想的换道路径曲线。
3.3基于安全换道域的B样条曲线换道路径
图8为双障碍车换道场景,设蓝车、黄车及红车的速度关系满足,由于红车和蓝车的距离保持不变,两车将一直以该相对位置出现在场景中,故该场景无法演变为单障碍车换道场景,可以利用安全换道域模型规划直线段换道路径。很显然,直线段换道路径并不符合实际,在建立的安全换道域理论框架基础上,引入三次准均匀B样条曲线进行换道局部路径规划。
图8中,定义按照直线段行驶的换道点B为假想换道点,按照曲线段行驶的换道点A为实际换道点。根据前文,若,则△BDG定义为安全换道域,域内任选一条换道直线段BE即可保证安全换道。对于无法演变为单障碍车换道场景的双障碍车换道场景,定义换道角,从而确定假想换道线段BE。实际上,换道路径不可能是线段ABCEF,而应当是类似图8中绿色实线的换道路径ACF。理由如下:在实际路径曲线与假想换道线段长度相等的前提下,假想的换道线段BE分割了蓝车和红车所在区域,黄车跨过车道分界线C点前,只要满足实际路径曲线位于BC左边,就能保证黄车不与蓝车追尾。同理,黄车跨过C点后,只要满足实际路径曲线位于CE右边,就能保证黄车不与红车相撞。
上述的A、B、C、E、F刚好可以看作三次准均匀B样条曲线的5个控制点,所形成的换道路径曲线可满足以下要求:1)路径曲率处处连续;2)控制点B保证路径在A点的切线与AB重合,控制点E同理;3)路径经过C点,且AC部分位于BC左边,CF部分位于CE右边;4)路径在A点和F点的曲率为0;5)定义B、C、E点的坐标分别为,定义,分别计算出20条B样条曲线路径弧线段ACF的长度和对应的直线段路径ABCEF的长度,并求出两者的差值,如图9所示。
由图9可以看出,越小,两者长度差值越小。当=10 m时,两者的长度差值约为0.3 m,远远小于约195 m的路径长度。因此,可认为弧线段ACF和直线段ABCEF长度相等。至此,从理论上论证了基于安全换道域模型利用B样条曲线进行局部路径规划的可行性。
3.4最优B样条曲线换道路径
在构建B样条曲线时人为定义了5个控制点,即存在以下2个问题:1)当及保持恒定时,如何选择的距离,即假想换道点B;2)当确定了假想换道点B后,如何选择的距离,即实际换道点A。上述问题可以归纳为在一定解空间内,寻找满足特定目标函数的最优解。综合分析文中换道路径特征和相关文献[21],定义换道路径综合评价函数为
式中:代表换道路径长度子目标函数,用于反映换道全程时间;代表换道路径平均曲率子目标函数,用于反映换道过程的横向舒适性;和是权重系数,考虑到更加注重横向舒适性,两者分别取为0.3和0.7;是换道路徑序列的坐标;是第i个路径点的曲率。显然,综合评价函数值越小代表该路径性能越好。
4基于安全换道域的换道决策
以图1和图2为基本换道场景提出的换道决策如图11所示。
换道决策的流程如下。
1)首先,本车在行车道定速巡航,通过摄像头、雷达等传感器实时获取周边环境的交通车辆的位置与速度信息。当小于某个阈值时,触发换道意图。
2)接着,判断此时本车所处的换道场景,若是单障碍车换道场景,则基于安全换道域模型,利用和插值计算最小(最大)临界安全换道角,根据适当选择调整假想换道角,之后便根据和绘制综合评价函数曲面,选择最优换道路径。
3)若是双障碍车速度相等,无法演变为单障碍车换道场景,首先建立安全换道域,在2个临界安全换道角曲面插值得到最大和最小临界安全换道角,进而求得假想换道角,然后利用建立综合评价函数曲面,基于该综合评价函数曲面挑选最优换道路径。
4)若是双障碍车换道场景中的另外3种速度关系,分别讨论如下。
由于黄车速度最高、红车速度最低,黄车期望的并道点及对应的蓝车纵向位置应当在红车前方。因此,黄车和蓝车都在红车前方时黄车开始换道最佳。针对换道前和的不同,又分为如下2种情况。
(i)若,此时若触发了换道意图,红车已经不对黄车产生障碍影响,故双障碍车换道场景演变为单障碍车换道场景。
(ii)若,红车的存在会影响黄车的变道决策,设经过时间ta后黄车车头与红车平齐,则。在时间ta过程中,对蓝车和黄车做碰撞检测,若,表明黄车追上红车时未追尾蓝车,此后黄车位于红车前方,该场景演变为单障碍车换道场景。而若,表明黄车保持车速行驶会与蓝车追尾,故黄车需要做减速处理。设黄车以减速度逐步减速至时刚好与蓝车追尾,则有如下关系式:
式中,为黄车减速至过程中蓝车的行驶距离。
求解式(10)得到黄车的临界安全减速度。因此,为保证黄车在减速过程中不与蓝车追尾,则黄车实际减速度应当满足。当两者速度相等后,黄车保持![]() 的速度跟驰,直到黄车超越红车,进而再择机换道。
的速度跟驰,直到黄车超越红车,进而再择机换道。
由于红车速度最高,黄车期望的并道点在红车后方。针对和的相对大小,分为2种情况:
黄车车速最高,黄车的期望并道点在红车前方,针对和的不同,分为2种情况:
5仿真
5.1设定典型换道场景
以图11的速度关系的双障碍车换道场景为例,设初始时刻,其中分别代表本车道障碍车、本车和目标车道障碍车的初始速度,分别代表本车道障碍车、本车和目标车道障碍车的起始位置的横坐标,并定义触发换道意图的阈值。将整个换道过程划分为如下6个阶段。
5.1.1定速巡航阶段
初始条件中,未触发换道意图,此时黄车保持定速巡航,设经过时间后,黄车与蓝车的距离减小为阈值,则定速巡航阶段经历时间为
5.1.2匀减速阶段
当时,触发换道意图。首先判断追尾碰撞检测是否合格,设黄车与红车车头平齐经历时间为,则有
此时蓝车与黄车行驶的路程分别为
由于,若黄车保持匀速行驶追赶红车,将导致黄车与蓝车追尾,故黄车应当采取制动减速。设黄车以减速度逐步减速至时黄车刚好与蓝车追尾,则有
代入数值,解得。因此,只要满足,黄车与蓝车便不会追尾。在此定义减速度,当黄车减速至时,耗时为![]() :
:
则黄车和红车在此阶段的行驶距离和分别为
5.1.3匀速跟驰阶段
若黄车减速至时还未与红车的车头平齐,进入匀速跟驰阶段,以达到黄车与红车的车头平齐,设该阶段经历时间为,则
5.1.4预换道加速阶段
匀速跟驰阶段结束后,需要根据建立换道路径簇的综合评价函数曲面。由图10可知,对综合评价函数影响较低,取10 m较合适,故设假想换道点与蓝车的期望距离,并设换道前的期望速度为,期望加速度为。
5.1.5换道阶段
预换道加速阶段结束后,采用B样条曲线进行换道拟合,进入换道阶段。
5.1.6超车道定速巡航阶段
当黄车换道驶入超车道后,进入定速巡航阶段。
5.2基于PreScan和Simulink的换道场景联合仿真
借助PreScan软件构建换道场景,并利用Simulink在逻辑判断、流程控制方面的优势,实现两者联合仿真,以验证所提出的基于安全换道域的换道决策规划的安全和有效性。
基于PreScan软件建立双障碍车换道场景,场景建模效果如图12所示。
得到3辆车横纵向位置随时间的变化曲线如图13所示,黑色曲线未与红色曲线和蓝色曲线相交,即3辆车的路线在时空上没有相遇,表明本车未与2个车道的障碍车发生碰撞,验证了上述换道决策具有一定的安全性。为更加细致地描述上述换道过程,单独绘制车速、纵向位置随仿真时间的变化曲线如图14所示,其中红色实线的6个平台分别代表了本车换道的定速巡航阶段、匀减速阶段、匀速跟驰阶段、换道前加速阶段、换道阶段和超车道定速巡航阶段共6个完整阶段。仿真结果表明,所提出的换道决策和换道路径规划能够实现本车的安全换道。
6结 论
结合安全换道角的概念提出了基于安全换道域的最优换道路径规划方法,并利用Simulink和PreScan实现了自动驾驶的场景仿真,得到如下结论。
1)对于无法演变为单障碍车换道场景的双障碍车换道场景(即速度关系),可以首先建立安全换道域,在2个临界安全换道角曲面插值得到最大和最小临界安全换道角,进而求得假想换道角,设定的变化范围可以获得一簇B样条换道路径曲线,然后用式(9)建立综合评价函数曲面,基于该曲面挑选最优换道路径。
2)对于可以演变为单障碍车换道场景的双障碍车换道场景(即速度关系除之外),则黄车可以通过一定的换道预操作(如加速、减速、匀速跟驰)腾出换道空间,将其转变为单障碍车换道场景后,直接在最大或最小临界安全换道角的基础上适当调整一定角度,确定假想换道角即可安全变道。
3)B样条曲线能够实现路径曲率连续变化,无突变,并且路径在换道点和并道点处的切线与车道中心线平行,所提出的基于安全换道角的换道决策和换道路径规划能够实现本车的安全换道。
参考文献
[1] 李硕, 杨晓芳. 基于元胞自动机的竞争型换道模型[J]. 交通运输研究, 2018, 4(4): 9-15.
Li S, Yang X F. Competitive lane-changing model based on cellular automata[J]. Transport Research, 2018, 4(4): 9-15. (in Chinese)
[2] Sharma A,Zheng Z D,Bhaskara A.A pattern recognition algorithm for assessing trajectory completeness[J]. Transportation Research Part C: Emerging Technologies, 2018, 96: 432-457.
[3] Yu H T, Tseng H E, Langari R. A human-like game theory-based controller for automatic lane changing[J]. Transportation Research Part C: Emerging Technologies, 2018, 88: 140-158.
[4] 陸建, 李英帅. 车辆换道行为建模的回顾与展望[J]. 交通运输系统工程与信息, 2017, 17(4): 48-55.
Lu J, Li Y S. Review and outlook of modeling of lane changing behavior[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(4): 48-55.(in Chinese)
[5] Worrall R, Bullen A, Gur Y. An elementary stochastic model of lane-changing on a multilane highway[J]. Highway ResearchRecord, 1970, 1(308): 1-12.
[6] 于扬, 梁军, 陈龙,等. 基于高斯混合隐马尔科夫模型与人工神经网络的紧急换道行为预测方法[J]. 中国机械工程, 2020, 31(23): 2874-2882.
Yu Y, Liang J, Chen L, et al. Vehicle emergency lane-changing behavior prediction method based on GMM-HMM and ANN[J]. China Mechanical Engineering, 2020, 31(23): 2874-2882.(in Chinese)
[7] Gipps P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414.
[8] Balal E, Cheu R L, Sarkodie-Gyan T. A binary decision model for discretionary lane changing move based on fuzzy inference system[J]. Transportation Research Part C: Emerging Technologies, 2016, 67: 47-61.
[9] 李娟, 曲大义, 刘聪. 基于模糊推理的驾驶员换道模型[J]. 济南大学学报(自然科学版), 2017, 31(5): 408-413.
Li J, Qu D Y, Liu C. Lane-changing models research based on fuzzy inference[J]. Journal of University of Jinan (Science and Technology), 2017, 31(5): 408-413.(in Chinese)
[10] Khatib O. Real-time obstacle avoidance for manipulators and mobile robots [J]. The International Journal of Robotics Research, 1986, 5(1): 90-98.
[11] Malone N, Chiang H T, Lesser K, et al. Hybrid dynamic moving obstacle avoidance using a stochastic reachable set-based potential field[J]. IEEE Transactions on Robotics, 2017, 33(5): 1124-1138.
[12] Golan Y, Edelman S, Shapiro A, et al. Online robot navigation using continuously updated artificial temperature gradients[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1280-1287.
[13] 唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报(自然科学版), 2018, 40(6): 174-182.
Tang Z R, Ji J, Wu M Y, et al. Vehicle path planning and tracking based on an improved artificial potential field method, Journal of Southwest University (Natural Science Edition), 2018, 40(6): 174-182.(in Chinese)
[14] 陈虹,申忱,郭洪艳,等. 面向动态避障的智能汽车滚动时域路径规划[J]. 中国公路学报, 2019, 32(1): 162-172.
Chen H, Shen C, Guo H Y, et al. Moving horizon path planning for intelligent vehicle considering dynamic obstacle avoidance[J]. China Journal of Highway and Transport, 2019, 32(1): 162-172.(in Chinese)
[15] Park B, Han W Y. Polynomial curve-based longitudinal motion planning for safe deceleration[C]// 15th International Conference on Control, Automation and Systems (ICCAS), October 13-16, 2015, Busan, South Korea. IEEE, 2015: 1186-1189.
[16] Zhou J, Zheng H, Wang J, et al. Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments[J]. IEEE Transactions on Vehicular Technology, 2020, 69(2): 1291-1308.
[17] 裴红蕾. 智能汽车换道避障路径规划与跟踪方法[J]. 中国安全科学学报, 2018, 28(9): 26-32.
Pei H L. Method of path planning and tracking for intelligent vehicle obstacle avoidance by lane changing[J]. China Safety Science Journal, 2018, 28(9): 26-32.(in Chinese)
[18] 任玥, 郑玲, 张巍,等. 基于模型预测控制的智能车辆主动避撞控制研究[J]. 汽车工程, 2019, 41(4): 404-410.
Ren Y, Zheng L, Zhang W, et al. A study on active collision avoidance control of autonomous vehicles based on model predictive control[J]. Automotive Engineering, 2019, 41(4): 404-410.(in Chinese)
[19] Hossein T N N, Mita S, Long H. Multi-sensor data fusion for autonomous vehicle navigation through adaptive particle filter[C]// 2010 IEEE Intelligent Vehicles Symposium, June 21-24, 2010, La Jolla, CA, USA. IEEE, 2010, 752-759.
[20] Berglund T, Brodnik A, Jonsson H, et al. Planning smooth and obstacle-avoiding B-spline paths for autonomous mining vehicles[J]. IEEE Transactions on Automation Science and Engineering, 2010, 7(1): 167-172.
[21] 周慧子, 胡學敏, 陈龙. 面向自动驾驶的动态路径规划避障算法[J]. 计算机应用, 2017, 37(3): 883-888.
Zhou H Z, Hu X M, Chen L, et al. Dynamic path planning for autonomous driving with avoidance of obstacles[J]. Journal of Computer Applications, 2017, 37(3): 883-888.(in Chinese)
(编辑 罗敏)
猜你喜欢
企业文化·下旬刊(2016年11期)2017-01-14 05:29:22
中小企业管理与科技·上旬刊(2017年1期)2017-01-06 13:38:53
建筑建材装饰(2016年13期)2017-01-04 11:30:05
青春岁月(2016年22期)2016-12-23 16:34:20
青春岁月(2016年22期)2016-12-23 15:58:54
中国高新技术企业(2016年31期)2016-12-22 09:16:43
中国新技术新产品(2016年22期)2016-11-29 06:33:02
商(2016年13期)2016-05-20 10:23:42
中国科技博览(2016年12期)2016-05-09 03:50:42
中国科技博览(2016年6期)2016-04-25 13:46:55