智能巡检机器人在变电站运维管理中的实践
2024-05-22 07:24华能新能源湘乡风力发电有限公司吴可可深圳昱拓智能有限公司欧阳峰潘致堂
电力设备管理 2024年6期
华能新能源湘乡风力发电有限公司 朱 峰 吴可可 深圳昱拓智能有限公司 欧阳峰 潘致堂 洪 龙
在社会经济快速发展的背景下,人们对供电质量等各个方面提出了更高的要求,而变电站运维管理效果会直接影响到电力系统的稳定性与供电质量。灵活应用智能巡检机器人可弥补传统运维管理手段的不足,增强变电站运行的稳定性,为此应在现有研究结果的基础上,分析智能巡检机器人在变电站运维管理中的实践。
在人工智能、自动化等技术手段不断发展的过程中,智能巡检机器人应运而生,为变电站管理提供了有效支持,因此利用文献资料法等方法对智能巡检机器人在变电站运维管理中的实践进行了研究与探讨。在探究过程中先分析了智能巡检机器人与变电站,之后分析了变电站智能巡检机器人的设计,最后以某变电站为例,对智能巡检机器人的应用进行了探讨。
1 智能巡检机器人与变电站概述
1.1 智能巡检机器人
智能巡检机器人可以在无人值守的环境中,对相关设备进行红外测温以及图像识别,从而代替人工巡检工作[1]。且智能巡检机器人具备多重功能,例如高清视频监控、红外测温、智能表计识别、历史数据查询等,在变电站运维管理中的应用范围较为广泛。
1.2 变电站
变电站指的是对电压和电流进行变换并接受电能、分配电能的场所,做好变电站的运维管理工作有利于及时发现相关设备的故障,强化变电站运行安全性与稳定性。
2 变电站智能巡检机器人的设计
若想充分发挥智能巡检机器人在变电站运维管理工作中的作用,需要先做好机器人的设计工作,确保机器人符合需求。
2.1 硬件设计
2.1.1 差分式放大电路设计
智能巡检机器人在工作过程中需要通过传感器接收信号,而为了确保输入信号的有效性,需要利用差分式放大电路,对传感器接收到的信号进行前置放大处理,从而减少干扰因素对信号的影响。根据变电站运维管理工作的需求,可以选择AD620仪表放大器这种设备,同时也需要利用公式(1)计算增益效果:
公式(1)中的GA为信号放大增益效果,RG为具体的差分式放大电路。
2.1.2 可控比例放大电路设计
为了增强A/D 转换的有序性,应科学设计可控比例放大电路,通过这一电路对经过差分放大后的信号进行优化处理。同时,为了扩大系统幅值的响应范围,需要利用ADG1611实现系统的可控增益功能,并利用OP07C 精密运算放大器对微弱信号进行放大处理,从而完成AD 满量程电压与输入信号之间的相互匹配[2]。在利用OP07C 精密运算放大器完成比例放大电路的构建后,需要对输入信号进行放大处理并利用公式(2)计算放大倍数:
公式(2)中GD为放大倍数,Rf为ADG1611投切反馈电阻,k为常数。
2.1.3 带通滤波电路设计
变电站智能巡检机器人的系统需要在高压工频电场中作业,会受到强电磁干扰等因素的影响,所以在进行硬件设计时,需要利用三阶巴特沃斯有源滤波电路进行带通滤波,从而去除50Hz 以外的干扰信号。
2.1.4 人机交互电路设计
人机交互电路主要是由按键控制电路、LCD 液晶显示电路以及过限声报警电路共同构成的,在设计时需要完善按键控制电路的“开关机”“下一机号数”“上一机号数”等功能;完善LCD 液晶显示电路的显示功能;完善过限声报警电路的报警功能。
2.1.5 单片机设计
单片机在智能巡检机器人系统中发挥着重要作用,可增强系统的控制性,所以设计时需要科学选择单片机。例如,可应用具备VDD 监视器、温度传感器、片内上电复位、片内电压比较器等设施的C8051F40单片机,从而有效应对环境造成的影响。同时,应利用公式(3)计算单片机的波特率:
公式(3)中的B为波特率,C为MCU 时钟频率,A为分频系数,D为波特率计数器重载值。
2.1.6 无线通信模块设计
无线通信模块也是智能巡检机器人系统中的关键模块,可以实现主机与从机的信息共享,在设计时可选择体积小、功耗低、接口灵活、集成难度小、传输距离远的BL100无线数据传输模块,且需要根据变电站运维管理的实际需求对无线通信模块的发射功率、串行速率、通信速率等参数进行科学调整。同时,需要利用UART 串口连接系统与该无线传输模块。
2.2 软件设计
2.2.1 主程序软件设计
主程序软件设计至关重要,为此可以将从机的工作流程设计为“进入延时开机状态并进行初始化处理→完成电路模板的自检工作→利用控制模数转换器对电压信号进行A/D 转换→利用单片机对数据进行分析处理”。其次,可以将主机的工作流程设计为“进入延时开机状态并进行初始化处理→将查询从机地址信号传输到从机中,由从机进行应答→若地址没有问题则展示从机的电场值,若地址存在问题则命令从机再次发送数据并进行二次核对→若从机数据存在过限问题则自动报警”[3]。
2.2.2 A/D 转换程序设计
为了优化A/D 转换,需要对ADC0进行合理配置,即利用控制寄存器对ADC0进行干预,且需要优化A/D 转换程序。
2.2.3 电场过限报警程序设计
从实际情况来看,电压等级不同,智能巡检机器人系统的从机报警值也不同。如果对输电线路进行带电作业,需要分析系统内置的电场强度限值是否高于实际电场强度,若是,则说明带电作业是安全的;若不是,则蜂鸣器就会自动报警。并且在设计时,需要做好电场测量试验工作,试验时需要利用公式(4)计算导线所带的电荷量:
公式(4)中的T为导线所带的电荷量,C为导线电容,U为导线对地电位。
3 智能巡检机器人在变电站运维管理中的应用
3.1 某变电站概况
某变电站系统由500kV 电压、220kV 电压以及35kV 电压共同组成,其运维管理工作以人工管理为主,存在无法及时跟踪和保存巡检结果、容易造成误判等问题,严重降低了管理质量。为了改变运维管理现状,该变电站应用了智能巡检机器人,且将智能巡检机器人应用在了单站模式与集控模式当中,取得了良好的效果。
3.2 智能巡检机器人的具体应用
3.2.1 在单站模式中的应用
该变电站在开展单站模式的运维管理工作时,主要通过智能巡检机器人进行可见光巡视,即在白天通过智能巡检机器人巡视高清表计,在夜晚通过智能巡检机器人进行红外测温巡视,其中红外测温巡视又包括温度检测、表计巡视、油位读数巡视、刀闸分合判断巡视以及全面巡视等内容。在使用前期,智能巡检机器人只承担每三次巡视工作中的其中一次,在巡视误差稳定后智能巡检机器人承担多次巡检工作。
另外,该变电站在应用智能巡检机器人时,先构建了海量图像收集监理模板库、神经网络训练模型以及通用匹配模型,之后利用智能表计识别功能对各种表计数据进行采集、识别与判断,具体识别过程如图1所示。智能巡检机器人在完成数据判断工作后会根据判断结果进行提示。例如,该智能巡检机器人在2022年5月7日,对变电站刀闸C 相T 型接头2设备进行红外测温时发现,接头温度在19.67~21.63℃,温度正常,没有出现过热问题,所以没有报警。

图1 表计数据识别与判断
3.2.2 在集控模式中的应用
在该变电站的集控模式中,智能巡检机器人的巡检系统结构如图2所示,其功能主要包括配置功能、数据功能以及任务功能,其中配置功能可以进行用户管理、角色管理、台账与操作日志管理,具有较强的完整性与保密性;数据功能可以对数据进行浏览与分析,且可以进行设备告警与缺陷管理;任务功能可以进行任务制定、展示以及统计。
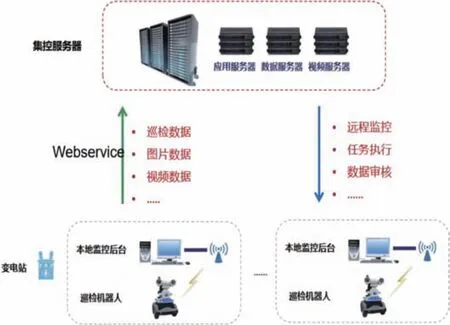
图2 智能巡检机器人的巡检系统
另外,智能巡检机器人可以进行二次识别,即根据规则推理以及高精度定位方法识别指针、条纹等表计读数,同时也可以通过数据挖掘、机器学习以及深度学习等技术分类识别数字表、刀闸的状态。此外,智能巡检机器人的巡检数据审核流程为下发任务→审核数据→缺陷管理→统计分析,其中下发任务包括制定和执行任务、审核数据包括审核站端数据与任务数据、缺陷管理包括缺陷审核与跟踪、统计分析包括设备告警与缺陷总览[4]。
3.3 智能巡检机器人的应用效果
该变电站在运维管理中运用智能巡检机器人后有效提高了管理质量,取得了良好的成效。首先,之前进行人工巡检时只能每7天巡检一次,而应用智能巡检机器人后可以每天巡检一次,有效提高了巡检频次[5]。其次,传统的人工巡检需要花费10h,而应用智能巡检机器人后可有效节约时间、减轻数据核实任务量,继而减轻运维管理人员的工作压力。此外,在高电压、高磁场环境等因素的影响下,变电站运维管理工作的安全性相对较低,而应用智能巡检机器人可有效增强运维管理的安全性。
4 结语
灵活应用智能巡检机器人可以有效地提高变电站巡检频次、减轻运维管理人员的工作压力、强化运维管理的安全性,所以应当提高对智能巡检机器人的重视程度,根据变电站的运维管理需求,优化智能巡检机器人的软硬件设计,并将智能巡检机器人应用在各个环节中,从而有效保障变电站的稳定运行。
智能巡检机器人具备智能巡检、红外测温等多重功能,可以提高变电站运维管理质量。因此,为了满足变电站运维管理需求,应做好智能巡检机器人的硬件与软件设计工作,且需要充分发挥智能巡检机器人在单站模式、集控模式等不同运维管理模式中的作用。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化·中考版(2019年10期)2019-11-25
中国交通信息化(2019年5期)2019-08-30
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
能源(2018年8期)2018-09-21
电子制作(2018年8期)2018-06-26
能源(2017年11期)2017-12-13
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年8期)2016-05-17