
基于广义塑性铰法的厂房钢结构承载力性能分析
2024-05-21 00:41何克诚
中国建筑金属结构 2024年4期
何克诚
(广西农垦设计院有限公司,广西 南宁 530000)
0 引言
分析钢框架结构的极限荷载对其设计、优化和安全性评价具有十分重要的作用。曾梓逸等[1]认为弹塑性分析是钢框架极限承载力最常用的方法。朱贺等[2]通过塑性铰法在结构极限荷载分析中,可以将每个单元划分为一或两个单元,这可以显著提高计算效率。马哲昊等[3]按照计算时所需考虑的各种因素,将塑性铰方法划分为三种类型。首先是一阶塑性铰算法,利用外部载荷与加载响应的比值特征,实现对加载增量及塑性铰的快速定位,从而实现对结构的承载能力及破坏途径的快速辨识。第二类方法是一类经典的二阶塑性铰算法,它是一种建立在递增非线性迭代解基础上的,可以较好地考虑几何非线性、初始缺陷等对结构稳定的影响,且具有较高的计算精度。第三类为近年来发展起来的广义塑性铰方法,在保持一阶塑性铰方法一阶特征的前提下,采用齐次广义屈服方程,既能实现对构件承载能力的快速计算,又能克服传统方法不能反映多重内力联合作用的缺点。鉴于此,此次研究将提出一种基于二阶广义塑性铰法的钢结构承载力计算方法以实现快捷且准确的求解。此次研究的创新点在于基于截面合成方法,构建工字形截面和H 型截面的一般广义屈服方程,采用二阶塑性方法对其进行线性迭代求解。
1 基于二阶广义塑性铰法的钢结构承载力计算
1.1 广义屈服函数齐次化的广义塑性铰法
在进行结构的解析和计算时,塑性铰法的假定是:零长度的塑性区是指仅在构件的末端段产生塑性区,其他段仍然是弹性区。横断面是平断面的假设,横断面在变形后仍然属于单平面。结构具有较小的断面尺寸和较多的支座,可使其获得较高的塑性承载能力。虽然构件的整体变形不大,但是可以产生很大的刚性位移量。载荷按一定的比例增大,所以整个结构的外部载荷可用一个载荷乘数来表达。在塑性铰方法中,首先对构件进行解析,得到刚度表达式,并对构件的载荷和变形进行计算;采用整体解析法,将各单元组合为整体,并确立载荷与位移之间的整体的刚度矩阵,从而得到整体的刚度公式。所以,在进行塑性铰法计算时,必须首先确立刚度矩阵。当构件在横断面上产生塑性铰链时,需对包含塑性铰链的构件的刚性矩阵进行修正,使之能够体现构件的力学特性。公式(1)为单元刚度矩阵。
式(1)中,A是单元的截面积,I是面积惯性矩,L是单元的长度,ψ1、ψ2、ψ3、ψ4是稳定刚度函数。基于一阶塑性铰法,广义塑性铰法考虑了不同类型内力对极限荷载的影响。基于这种方法,可以认为由受损节段的整个横截面产生的塑性铰链不仅取决于弯矩,还取决于其他内力,如轴向力。公式(2)为一阶塑性铰法的截面屈服判据。
式(2)中,f(m)表示广义屈服函数,M是构件截面弯矩,Mp是全截面塑性抗弯强度。可以看出,一阶塑性铰法根据弯矩建立截面的屈服准则,当内力的比值超过弯矩时,内力对横截面的影响可以忽略不计。但在实际工程中,大多数结构的截面都受到轴向力和弯矩的共同作用,这一点不容忽视。因此,需要考虑多个内力对截面塑性屈服的影响,这使得式(2)不适用于这种情况。为了充分考虑轴向力、弯曲力和剪切力的共同作用,采用上限承载力关系方程作为截面屈服的标准,如公式(3)所示。
式中,n表示轴力N的无量纲内力,m表示弯矩M的无量纲内力,q表示剪力Q的无量纲内力。Qp表示剪切强度。公式(4)为齐次广义屈服函数表达式。
齐次化的必要性是由于式(3)中的广义屈服函数的无量纲内力项中的轴线和弯矩将导致函数值与外部负载的比例不是恒定的。为了充分利用内外力的相对特性和增量荷载的快速计算,需要使用齐次屈服函数来消除不均匀性的影响。公式(5)为单元承载比计算表达式。
式中,Re是截面初始强度,是失效阶段原始负载的负载效应,是序前累计负荷。图1 为力点在屈服平面上的运动轨迹。
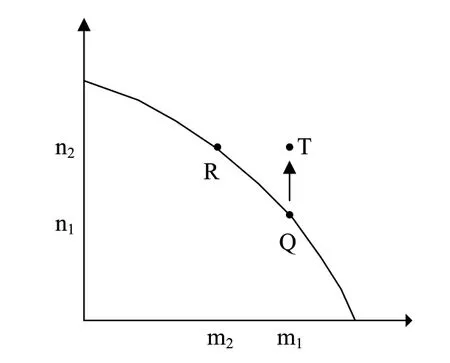
图1 屈服面力点移动路径
横截面的应力状态在曲线的Q 点处。如果轴向力从n1增加到n2,那么力必须从曲线的点Q 转移到R 位置,但假设横截面的弯曲力矩将保持不变,应力条件将从Q 转移到T,这将破坏塑性铰链段内力的平衡,从而导致计算中的误差。为此,广义塑性铰法提出了一个平衡向量,用公式(7)表示。
式(8)中,Ki是等效于荷载初始阶段的整体刚性矩阵。是载荷步进节点的位移矢量。是从单位均衡矢量中综合出总体均衡矢量。为第i加载步末的结点荷载向量。
1.2 基于二阶广义塑性铰法的钢框架结构稳定承载力分析
由于受力性能的限制,钢架的面内稳定性问题较之面外稳定性问题更为复杂,且受构件的几何非线性及初生缺陷等因素的制约。几何非线性亦指由构件弯曲变形所引起的P-δ影响及由横移所引起的P- Δ 影响。而原始缺陷,就是因为生产工艺、安装技术等原因,总会有一些诸如初偏心等的几何缺陷,以及残留应力。因此,在进行构件的极限承载力计算时,应充分考虑这两方面的影响。然而,由于忽视了上述两个影响,目前常用的广义塑性铰方法在某些情况下存在着计算精度不高的问题。二阶解析法是在计算结构内力时,将二阶效应、初值等稳定因素纳入其中的一种,也就是所谓的二阶内力[4]。考虑到多个内力共同加载时,需要使用承载力关联公式来判定塑性铰链的产生,而在此基础上构建的广义屈服函数可以有效地反映构件的屈服水平。图2 是H 形剖面的简图,并给出了H 形剖面的结构参数和内部压力。
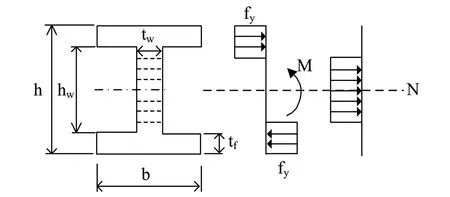
图2 H 字型截面参数及内力示意图
该截面受轴力N 和弯矩M 作用,b、h、tf和tw分别表示截面宽、高、翼缘和腹板厚度,材料屈服应力为fy。断面组合法假设,接近中性轴线的部位,腹板受到轴向力,距离中性轴线较远的部位,腹板和凸缘受到力矩,将断面上每一块矩形板的内力综合起来,以求出整个断面的承载力,进而得出在轴向力和弯矩共同作用下工字形和H 形断面的广义屈服函数。在二阶解析中,因为在刚性矩阵中包含了轴向力,使得刚性方程不能被线性地计算出来,为了处理这样的非线性问题,就必须进行递增式的非线性迭代法,在每一次迭代法之后,都会对位移进行修正,直到将不平衡力的矢量降到可以忽略的程度,才能进行下一次的递增。为了获得准确的非线性方程组,需要采用递增的方法进行迭代,但在工程中,为了保证方程组的正确性,需要尽可能减少迭代次数。鉴于此,在已有工作的基础上,拟提出一种二阶塑性有限元简化算法,并将其应用于工程实际。
2 二阶广义塑性铰法计算钢框架结构稳定承载力的结果分析
试验选择的钢架结构跨度为3.5m,柱高为4m,梁和柱采用欧洲制造的钢材。该材料具有2.1×105MPa 的弹性模量,和235 yf 屈服强度。对其进行了多种计算,得出了其承载能力及计算次数,如图3 所示。
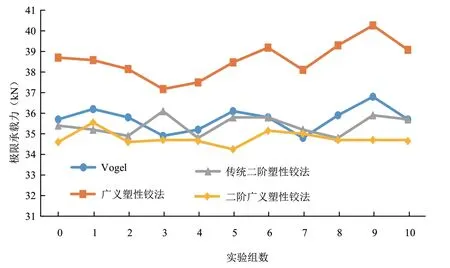
图3 不同承载力计算方法的结果
从图3 可知,广义塑性铰法与基于塑性区法的Vogel 的准确计算值相比,存在着9.12%的相对偏差,这说明广义塑性铰法并没有将稳定因子(如:几何非线性、初始化)引入到其有限元模型中,从而造成了广义塑性铰模型的过高估计。另外,所构建的二阶广义塑性铰模型与Vogel 模型的相对偏差只有0.76%,说明所构建的二阶广义塑性铰模型可以有效地综合考虑多种稳定因子,并有很高的准确性。另外,传统二阶塑性铰法和 Vogel法的相对偏差只有2.71%,同样是一种高精度的方法。然而, 传统二阶塑性铰法在进行极限承载力数值模拟时,采用了递进式的非线性迭代法,使得其数值模拟的时间较二阶广义塑性铰长达2.7 倍,且计算速度较慢。结果显示,所构建的二阶广义塑性铰法具有较高的计算效率和计算精度。表1 为不同计算方法下失效阶段单元截面内力结果。
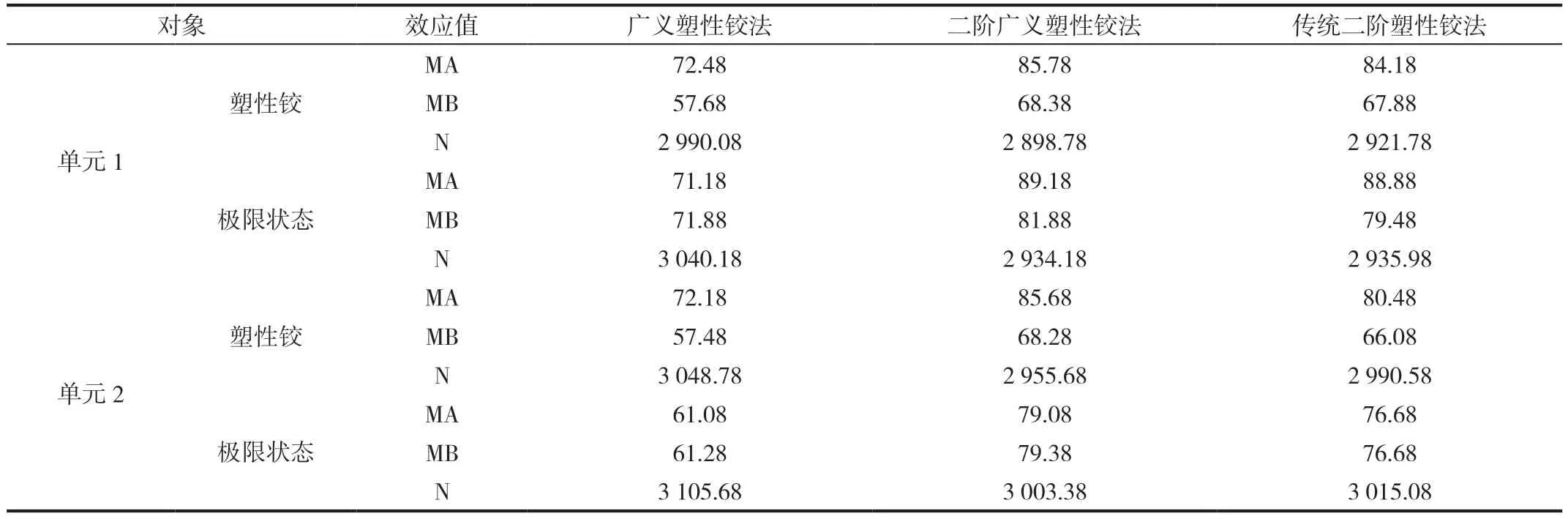
表1 不同计算方法下失效阶段单元截面内力
从表2 可知,传统二阶塑性铰法和二阶广义塑性铰法计算出来的弯矩与轴力在不同失效阶段、不同截面上都可以很好地符合,相对误差不超过4.5%。这说明建立的二阶广义塑性铰法可以准确地计算结构内力[5]。此外,在发生一次塑性铰接后,采用通用有限元方法和传统二阶塑性铰方法得到的结果相差很大,部分构件的相对偏差可达15%以上。这说明该方法在实际应用中存在着较大的偏差,从而使其与塑性区法相比具有较大的差异。由此,可以用广义塑性铰法所求的轴向作用力的增量修正刚性阵来逼近准确的非线性刚性阵,从而使所提算法在迭代过程中能迅速收敛。图4 为不同α下结构极限承载力。
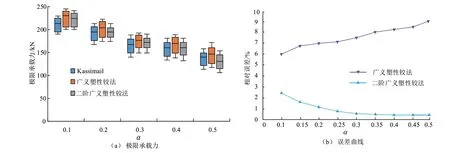
图4 不同α 下结构极限承载力
从图4 可知,结构重力对水平横向位移的二阶影响随着位移的增加而增强。由于广义塑性铰法不能考虑几何非线性和原始结构缺陷,计算误差也在上升。当α=0.5 时,相对误差超过8%,这夸大了结构的极限承载能力。但是二阶广义塑性铰的计算误差在所有情况下都小于3%,因此该方法精度更高。
3 结论
钢框架结构稳定性研究是工程领域的一个热点。塑性铰和塑性区是分析钢框架结构极限荷载的常用方法。广义塑性铰链法作为塑性铰链研究的新成果,克服了一阶塑性铰链不能考虑多种内力共同作用的问题。依据此,本次研究提出了一种二阶广义塑性铰法。结论如下:
(1)广义塑性铰法相对误差超过8%,二阶广义塑性铰的计算误差在所有情况下都小于2%,因此该方法精度更高;
(2)广义塑性铰法和二阶广义塑性铰法与基于塑性区法的Vogel 的准确计算值,差值分别为9.12%和0.76%,后者差值更小;
(3)考虑稳定荷载对结构极限的影响,二阶广义塑性铰法可以高效且准确地进行钢结构承载力计算。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
中国生殖健康(2020年8期)2021-01-18
应用数学(2020年2期)2020-06-24
城市道桥与防洪(2019年5期)2019-06-26
中国中医急症(2019年10期)2019-05-21
数学物理学报(2018年6期)2019-01-28
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
中国生殖健康(2018年3期)2018-11-06
数学年刊A辑(中文版)(2016年2期)2016-10-30
