洪涝灾害地域时空数据融合算法的性能评估与对比研究
2024-05-03 05:42李奇泽
信息记录材料 2024年3期
李奇泽
(太原学院计算机科学与技术系 山西 太原 030032)
0 引言
洪涝灾害一直是对人类生命和财产安全构成重大威胁的自然灾害之一。准确测定受灾面积有助于及时了解灾情的严重程度,有针对性地展开救援行动,并为灾后评估提供可靠的数据支持。通过对受灾面积的精准测算,政府和救援机构能够更有效地分配资源、协调救援行动,最大限度地减少灾害带来的损失,加快受灾地区的恢复重建进程。遥感卫星图像具有全面性、高空间分辨率、定期观测、自动化和多波段数据等特点,为各种应用领域提供了重要的数据支持和技术手段,同样提供了有效的手段来及时发现和跟踪洪水的形成和演变。目前洪水监测过程采用哨兵二号等数据,然而哨兵二号数据获取比较困难,在实际中多采用中分辨率成像光谱仪(moderate-resolution imaging spectroradiometer,MODIS)等获取的低空间分辨率数据,例如吴黎等[1]基于MODIS 数据对黑龙江省2013 年发生的洪涝灾害进行监测。李斌等[2]对长江中游三个湖区的水体淹没范围进行提取,并分析其洪涝特征。然而该类低空间分辨率数据分辨率较低,并且同一像元中可能包含几种不同的地物类型,实际分析过程中存在很大挑战。因此,亟需高时间分辨率与高空间分辨率图像来精确地进行洪水监测。时空融合算法为洪水监测等问题提供了解决思路,能够实现在不同空间分辨率影像之间的有效信息整合,以便用于洪水监测。
深度学习能够从大量数据中学习复杂的特征和模式,能够更有效地处理不同分辨率和时序的遥感数据,能够获取同时具备高时间和高空间分辨率的遥感卫星图像[3]。Tan 等[4]提出的基于生成对抗网络的时空融合(generative adversarial network-based spatiotemporal fusion model,GANSTFM)算法能够使用随机时刻的参考图像进行预测;Li等[5]提出的传感器偏差驱动的时空融合(sensor biasdriven spatial temporal fusion,BiaSTF)算法考虑了传感器差异;Song 等[6]提出的基于生成对抗网络的多级特征融合( multi-level feature fusion with generative adversarial network,MLFF-GAN)算法设计了编码器-解码器网络结构来提取并融合生成不同级别特征。为了解决洪水等突变区域高时空数据获取困难的问题,本文选用以上三种算法重建高时空分辨率数据,为实际洪水监测提供决策支持。
1 典型的深度学习时空融合算法
1.1 GAN-STFM 算法
GAN-STFM 算法使用预测时刻低分辨率图像与任意时刻高分辨率图像进行融合,克服对参考图像的时间限制。生成器采用编码器-解码器结构,通过编码器将输入的低分辨率图像转换为潜在空间表示,并通过解码器将潜在表示转换为高分辨率图像,并利用卷积操作来输出重建的图像。生成器编解码结构使得生成器能够有效地学习到时空信息的变化规律,并生成与输入图像相匹配的高分辨率图像。
为了提高融合结果的质量和稳定性,GAN-STFM 算法采用了多尺度判别器。该判别器利用了跳过连接方式来提取图像的特征,并结合了Sigmoid 分类器来判断生成图像的真实性。多尺度判别器能够在不同尺度上对生成图像进行全面评估,从而提高了对抗训练的效果和收敛速度。此外,为了减少模型输入的限制,GAN-STFM 算法采用了归一化技术,能够将输入数据进行适当的归一化处理,使得模型更容易学习到数据之间的相关性和模式,从而提高了融合的效果。GAN-STFM 算法网络结构如图1所示。
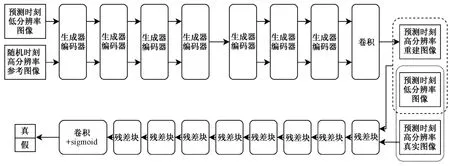
图1 GAN-STFM 算法网络结构图
1.2 BiaSTF 算法
传统的时空融合方法通常假设图像之间的变化可以直接从一个传感器转移到另一个传感器,从而实现对高时空分辨率图像的重建。此假设的前提是图像之间存在着稳定的空间和时间关系,使得可以通过简单的插值或变换方法将低分辨率图像与高分辨率图像进行匹配和融合。然而,实际情况往往更加复杂,可能会导致融合结果的失真和不准确性。因此,BiaSTF 算法考虑了不同传感器在融合过程中引入的偏差,以减轻传统方法中光谱和空间畸变之间的差异。该方法采用了一种新的基于卷积神经网络(convolutional neural network,CNN)的设计,能够有效地学习图像之间的变化信息和传感器之间的偏差。
具体来说,使用变化学习网络来学习图像之间的变化信息,它能够捕捉到不同时间或不同传感器下图像之间的变化模式,并将变化信息用于后续的融合过程;使用偏差学习网络来学习传感器之间的偏差,偏差学习网络能够提取不同传感器采集的数据间的差异,并在训练中对传感器差异进行建模和学习,从而降低了传感器偏差对融合结果的影响,提高了融合的准确性和稳健性。BiaSTF 算法的网络结构如图2 所示。
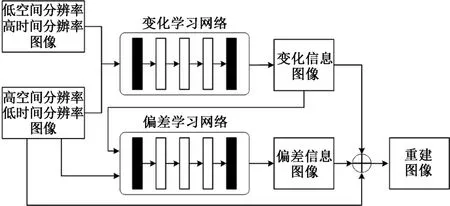
图2 BiaSTF 算法网络结构图
1.3 MLFF-GAN 算法
MLFF-GAN 算法设计了基于GAN 的编解码结构来学习图像融合的多层特征。生成器包括特征提取、特征融合和特征重建。生成器结构如图3 所示,特征提取和特征重建组成编码解码结构,以提取和重建多层次特征,从而解决高分辨率图像与低分辨率图像之间的巨大分辨率差异。编码器负责将输入的低分辨率图像转换为多层次的特征表示,而解码器则负责将多层次特征表示转换回高分辨率图像,从而实现更精确的重建。

图3 MLFF-GAN 算法生成器网络结构图
在融合阶段,引入自适应实例规范块来优化全局光谱分布。自适应实例归一化是一种用于神经网络中的归一化技术,它允许将输入的特征图与另一个样式图的统计信息进行匹配和调整,主要思想是根据样式图的统计信息来调整输入特征的均值和方差,从而实现对特征的风格转换或风格迁移。在MLFF-GAN 算法网络中,自适应实例规范块能够将不同时态的特征图之间的统计信息进行对齐和调整,从而实现对时空信息的全局融合。此外,特征融合过程中还使用注意力模块来学习小区域变化时的局部信息权值。注意力模块能够有效地捕捉到图像中重要的局部特征,并将其融合到生成的高分辨率图像中,从而提高了融合结果的质量和准确性。
MLFF-GAN 算法的鉴别器采用基本的分类神经网络,鉴别器主要任务是将生成的图像与真实图像进行区分,由多个卷积块组成,每个卷积块包含卷积层、批归一化层和LeakyReLU 激活函数,该卷积块能够有效地提取图像的特征,并将其映射到一个介于0 和1 之间的值。
2 实验
2.1 研究区域和数据集
在实验过程中,本文选择位于澳大利亚新南威尔士州北部的圭迪尔河下游集水区(lower Gwydir catchment,LGC),其占地面积为5 440 km2,该区域2004 年4 月至2005 年4 月期间共获得14 对无云的Landsat-MODIS 数据。在2004 年12 月中旬,由于洪水原因,研究区域的植被被淹没,导致湿度指数偏离正常数值。据估计,洪水及其后续淹没现象涵盖了约44%的广阔区域。此次洪水事件使得圭迪尔河地区被视为时间上更为动态的地点。洪水事件对研究人员所研究的异质性地区具有重要意义,因为它引发了时空响应的变化,从而影响了研究区的动态性和光谱特征。
2.2 评价指标
(1)均方误差
均方根误差(root mean square error,RMSE)是一种用于衡量预测图像与真实图像之间差异的指标。RMSE 的值越小,表示预测图像与真实图像之间的差异越小,融合精度越高。具体可以使用式(2)进行表示:
式(2)中,h表示图像的高,w表示图像的宽,L表示真实图像,表示重建的预测时刻图像。
(2)光谱角
光谱角(spectral angle mapper,SAM)用于衡量预测图像与真实图像之间不同波段的光谱相关程度,SAM 的值越小,两张图像越相似。具体如公式(3)所示:
式(3)中,N表示图像波段的数量,M表示图像像元的数量,yi表示真实图像的第i个像元,表示重建图像的第i个像元。
(3)结构相似度
结构相似度(structure similarity index measure,SSIM)广泛用于计算机视觉领域,通过均值、标准差和协方差来综合衡量两张图像的相似度。SSIM 的值越大,说明两幅图像在纹理结构上更相似。具体可以使用式(4)表示:
式(4)中,表示重建预测时刻图像与真实图像之间的协方差,σy和σy^分别为真实图像与预测图像的标准差,μy和μy^分别为真实图像与预测图像的均值,C1和C2是额外添加的非零常数项,避免出现分母为0 的情况。
2.3 实验过程与结果
本文针对洪水区域数据选取了GAN-STFM、BiaSTF 和MLFF-GAN 三种基于深度学习的时空融合算法,采用RMSE、SAM 和SSIM 三个评价指标对融合结果进行评估,具体结果见表1。综合评价来看,BiaSTF 算法的表现最差,而MLFF-GAN 算法的表现最佳。在各指标中:GANSTFM 算法获得了SAM 的最优值,表明重建图像与真实图像光谱之间的差异最小;而MLFF-GAN 算法的结果显示,在像素差异和结构相似性方面与真实图像的拟合度最高。

表1 融合精度评估
本文对不同算法重建图像的结果进行了进一步可视化分析,如图4 所示。分析显示:BiaSTF 算法在洪水区域边界产生了大量错误细节,重建效果明显较差;GANSTFM 算法虽然在某些区域可以较好地进行重建,但在左侧洪水大面积淹没地区表现不佳;MLFF-GAN 算法虽然在精度评估中取得了最佳结果,但在洪水区域的重建方面仍存在不足。
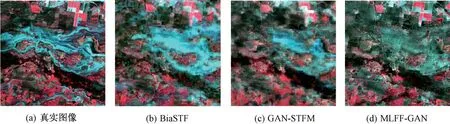
图4 三种算法重建图像比较
3 结语
高时空分辨率的遥感图像为监测洪水灾害提供了可靠的途径。为了能够获取具有高时空分辨率的遥感图像,本文选取GAN-STFM、BiaSTF 和MLFF-GAN 三种算法,以LGC 数据集为研究对象展开对洪涝灾害地域时空数据融合算法的性能评估与对比研究。结果表明三种算法可以用于洪水监测中,MLFF-GAN 算法虽然在融合精度评估方面表现最佳,但是无法有效重建洪水区域;BiaSTF 算法考虑了传感器差异,虽然能够重建洪水区域,但无法准确重建边缘细节,GAN-STFM 算法只能重建部分洪水区域。综上,进一步的研究方向可以聚焦于优化现有算法和探索混合方法,以实现更高的融合精度和洪涝灾害管理的鲁棒性。
猜你喜欢
四川党的建设(2022年8期)2022-04-28
小学生学习指导(低年级)(2020年11期)2020-12-14
数学物理学报(2019年3期)2019-07-23
娃娃乐园·综合智能(2019年6期)2019-07-10
作文大王·低年级(2018年10期)2018-12-06
家庭影院技术(2018年9期)2018-11-02
天津诗人(2017年2期)2017-11-29
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
小猕猴智力画刊(2016年5期)2016-05-14