
ERCP训练模型的现况与问题及未来发展设想
2024-04-29 09:44:16李锦阳王玮琛谢婉莹陈晓晓谭淞文何超刘威熊力
中国普通外科杂志 2024年3期
李锦阳,王玮琛,谢婉莹,陈晓晓,谭淞文,何超,刘威,熊力
(1.中南大学湘雅二医院 普通外科,湖南 长沙 410011;2.中南大学湘雅药学院,湖南 长沙 410013)
内镜逆行胰胆管造影术(endoscopic retrograde cholangiopancreatography,ERCP)是一种常用的胆胰外科诊治技术。由于其操作难度系数大、学习曲线比其他内镜操作技术更长[1]。操作医生的熟练度与插管成功率和术后并发症的发生率均直接相关[2]。术后并发症危害较严重。所以,ERCP 的操作训练就十分重要。
目前ERCP 的操作训练所使用的模型类型按训练学习顺序分类主要有四类:计算机模拟模型、机械模拟操作模型、离体动物操作模型、活体动物操作模型[3-4]。以上四类操作模型有各自的优点,但均不能满足所有的训练环境的需求和训练目的。因此本文在总结上述模型的优缺点同时,创新性提出ERCP 训练的“五阶段法”—将不同模型联合,根据操作者自身的需求以及训练条件的限制,分阶段使用不同模型进行训练。旨在解决ERCP 训练学习周期长、难度大等问题。同时还提出,建立元宇宙训练模型联合AI 反馈操作实时数据,加强每一次训练细节的可视度,精细化调整训练方案。有潜力成为ERCP 训练模型迭代的新方向。
1 ERCP及相关操作
1968 年,第一次报道使用内镜完成乳头插管的操作。随着前视镜器械的发明应用,促进了ERCP 相关技术理论的成型,ERCP 这个名字首次出现于1974 年墨西哥举办的世界大会专题研讨会,是指将内窥镜和X 射线影像技术结合的一种手术方法,具体是先在患者的体内引入1 个内窥镜,从胃进入十二指肠,找到十二指肠乳头后打入造影剂,在X 射线下可以清晰地看到胆胰管的具体情况[5]。
由于ERCP 手术操作难度系数大、学习时间长、术后并发症严重[6-7],需要操作者不断训练,提高手术安全性[8]。Spyglass 子母镜,即在母镜十二指肠镜的基础上增加了子镜胆道镜,可在一定程度上降低ERCP 的操作难度和减少学习时长。在欧洲[9]、英国[10]和美国等各国都非常重视ERCP 训练[11],并且都出台了培训规范。在国内也有很多家医院对ERCP 的训练十分重视,如:在2022 年,中南大学湘雅二医院举办了ERCP 技术培训班,培训导师们示范了手术的每一步的规范操作,帮助学员们进行技术纠正和改进。要求进行ERCP 操作的医生每年需要完成对应手术数目[12]:虽然每个国家具体要求的年操作次数不一样,但均在100 次左右(图1),这也再次说明了ERCP 需要反复操作训练。传统的训练模式是学习操作者通过培训者的指令和示范操作直接在患者身上进行操作。由于学习操作者缺乏经验,容易有过度紧张的心理,导致操作不规范,这会增加患者术后并发症发生的概率,对患者可能造成不可忽视的创伤。而且事实上,很多已经通过培训却没有达到足够训练次数的操作者仍然无法独立、高效、安全完成ERCP 手术,这可能和训练操作的不规范、训练模型无法模拟出真实环境、操作者面对术中并发症时缺乏经验等有关。由此可见,适用于ERCP 训练的机会很少[13],亟需高效的训练体系。

图1 不同国家ERCP训练标准的比较Figure 1 Comparison of ERCP training standards of different countries
2 ERCP训练模型发展状况及存在的问题
2.1 模拟操作模型的现况
除了使用离体、活体动物模型以外,计算机模拟操作系统、机械模拟操作模型也是训练ERCP操作常用的训练模型。可以将计算机模拟操作模型和机械模拟操作模型统称为模拟操作模型。
在最早训练模型研发阶段,操作者要想增加ERCP 操作的熟练度和手眼协调能力,只能通过塑料或橡胶管来模拟肠道环境[14]。这种机械式模拟系统既不能还原触碰到不同组织所反馈的触感,也无法模拟肠道的蠕动,对增加操作者经验效果甚微,训练者需要制作出与真实场景更加相似的模型进行训练。2008 年,Frimberger 等[15]运用一些常见的且易获得的工具研发了机械式ERCP 训练模型—X-vision 模型,这个模型是由4 个机械模型组成,它可以模拟胰腺或胆管进行选择性插管训练,还可以根据不同排列的乳头进行支架放置训练和生物乳头括约肌切开术的训练。在后续阶段,von Delius 等[16]对X-vision 模型训 练ERCP 进行应用效果进行评估。但是这种训练模型有一些无法解决的问题,如机械模型很难模拟出人类肠道的黏膜以及平滑肌走行方向,这也是之后机械模型一直未能很好解决的一个问题。
2014 年,Nguyen 等[17]使用弹簧模型和Signorini的接触模型一定程度上解决了机械乳头无法模拟真实触感的问题。2018 年,van der Wiel 等[18]开发了一种The Boskoski-Costamagna ERCP 机械性操作训练模型,这种模型拥有体积小,便于运输且同样适配于其他内窥镜训练的特点。这增加了机械模型的灵活性,使操作者能够在更多场景和时间下进行训练。2020 年,Jirapinyo 等[19]开发了TEST box,他们创新性地使用了硅胶模拟乳头,并使模型具有可以任意改变乳头的角度、改变胆胰管开口位置、改变乳头在十二指肠内的位置等特点,很大程度上解决了机械模型无法真实模拟出人生理解剖场景的弊端。通过文献的查阅,机械模型目前主要是在十二指肠乳头的模拟上有较大的突破,但对肠道的其他环境模拟效果并不如其他模型,可以与其他模型联合使用,取长补短,增加整体模型的真实性。由于机械模型操作相对简单,通常被初学者使用训练,可以增加初学者的信心以及对ERCP 操作流程的熟悉程度。在2020 年,Meng等[20]也对机械模拟训练对初学ERCP 的影响进行了报道分析,研究指出:机械训练模型是一种适合初学者训练ERCP 的训练模型有助于提高学员的早期插管成功率,缩短学习曲线,降低对患者的潜在风险。
有关计算机模拟模型的使用最早是在1990 年,Williams 等[21]开发了第一个用于内窥镜训练的计算机模拟系统。2000 年,Bar-Meir[22]借鉴航天领域中的计算机模型模拟训练,将其运用到内窥镜的训练中,并介绍了Simbionix 和HT Medical Systems 这两种目前已经投入使用的计算机模拟模型的优点和训练成果,对计算机模拟模型寄予厚望。2003 年,Sedlack 等[23]通过比较几种训练模型的学员训练成果发现,计算机模拟操作模型可以在减少培训时长的同时得到较好的操作熟练度。2006 年,有学者[24-25]创造了计算机模拟操作训练模型,这个模型包括了模拟人解剖模型和内窥镜。学员可以通过计算机模拟操作锻炼手眼协调能力。但是价格十分昂贵,并且需要特定条件的储藏室,对操作环境的要求较高[23]。随着虚拟现实(virtual reality,VR)技术进一步发展,开始有科学家将其与内窥镜的训练结合在一起,并且对其训练结果的有效性和可靠性进行评估测试[26-28],2010 年,Bittner等[29]将计算机模拟系统和VR 相结合的技术进一步完善,开发了GI Mentor Ⅱ系统。新系统增加了训练计算机模型的真实性,为操作者提供了更真实的应力感应以及完善了训练指标的评定。由于临床上对ERCP 手术的需求量大、操作难度高、培训周期长[30],所以训练模型需要能够使操作者在短期内达到良好的训练效果[31]。Boškoski 等[30]在2019 年ERCP 训练教学中也指出,目前最新的计算机模拟系统有:Simbionix GI-MentorTM、GI-Mentor IITM和CAE Healthcare Accu TouchTM,它们都是给予假人模型和计算机模拟操作,进行病例模块预设的训练系统,但也都存在着经济成本过高和无法获得真实触感反馈等问题。解决触感以及应力反馈等问题可以将计算机模型加入体感装置,通过电磁阻抗和振动使操作者获得更多的反馈。还可以与AI学习结合,进一步增加模拟图像的真实性。
2.2 模拟操作模型存在的问题
2.2.1 机械操作模型机械操作模型作为初学者熟悉手术入路以及操作步骤是一种良好的操作模型,但机械操作模型最大的问题就是无法完全模拟出完整的肠道环境,现阶段随着技术发展,部分解决了十二指肠乳头触感真实性的问题,但仍无法完全模拟肠道蠕动以及黏膜和平滑肌等。
2.2.2 计算机模拟模型和机械模型相比,计算机模拟可以增加模型的真实性且可以将操作数据实时反馈,但大多机构并没有充足的基金用来引进计算机模拟系统,这极大程度上限制了该模型的适用场景。计算机系统模拟模型可以通过VR 等增加视觉真实性,但是其在触感模拟以及团队协作的磨合训练和面对突发状况的应急解决方案的训练上仍然无法得到较好的效果。除此之外,高昂的经费也是计算机模拟模型的局限之一。在保证模拟的视觉真实性的同时降低制作成本以及联合体感可能是未来计算机模拟模型进一步提升的方向。
2.3 活体动物操作模型的现况
目前适用于ERCP 手术操作的实验动物相对少见。在1974 年,Falkenstein 等[32]首次将狗作为ERCP 训练模型,他们认为狗具有和人类类似的胆胰系统解剖特点,是训练ERCP 较好的模型。之后也有Yandza 等[33]也将狗作为训练模型,但这引发了动物保护者协会的不满。这反映了当使用活体动物作为训练模型时,需要面对实验动物伦理问题。1989 年,Siegel 等[34]使用与人类同为灵长类动物的狒狒作为实验动物进行ERCP 的操作训练。在训练过程中发现:狒狒能够较好地模拟出人类肠道蠕动和胆胰管的解剖结构的特点。但研究灵长类动物的设施很有限,且需要高额成本,很少有实验机构能大量使用狒狒作为手术操作训练的模型。在1990 年,Gholson 等[35]首次提出,用猪来作为ERCP 训练模型。经过更多的实验发现,猪在生理模拟效果、模型的可操作性以及模型术后恢复性都十分出色,同时也解决费用昂贵的问题,为ERCP 活体动物训练模型打开了新篇章,猪成为现阶段最常用的活体模型动物。除此之外,运用活体动物模型可以评价生物安全性,为内置物进行组织相容性评价[36-37]。这些也是活体动物进行ERCP 训练的最重要的优点,可以强化操作者进行1 次完整的操作,在全程中都注意预防可能发生的并发症,对实验动物进行最大程度的利用。
2.4 活体动物模型存在的问题
2.4.1 猪实验用猪的品种有很多如约克夏猪、巴马小猪等,不同品种的猪所需要的饲养费用和胆胰管的解剖可能存在差异。可以根据不同实验的需求进行不同的选择。在将活体猪作为操作模型一段时间后,实验者发现,每一次训练就要耗费一只实验动物,其经济低廉的优点逐渐被弱化,且仍然涉及实验动物伦理问题。此外,正常生理情况下,猪的胆胰系统解剖和人类的胆胰系统解剖仍然存在着一些生理上的差别[38],如:Laukkarinen 等[39]发现由于十二指肠长度不同,无法在猪体内进行内镜插管技术,正常的十二指肠镜太短,无法到达猪十二指肠乳头;猪十二指肠乳头和幽门距离过近也增加了插管和定位的难度[40]。经查验,这可能与猪的品种有关,具体情况有待进一步验证[41]。但目前可以确定的是,不同猪的胆胰系统的解剖结构确实存在着个体差异[42]。
2.4.2 猴子在ERCP 手术操作模型的历史上也存在使用猴子作为训练模型的例子,但较为罕见,可能是因为培养猴子作为实验动物的成本较高,并且猴子的胆胰系统无法完全模拟人类的胆胰系统的解剖[43],因此很少有学者使用猴子作为动物训练模型。
2.4.3 狗狗的胆胰系统和人类相比,最大的不同在于狗的胰腺在胃的上段和胃系膜腹段背侧,呈现倒“V”形,右叶位于十二指肠系膜中段,沿着十二指肠方向延伸;左叶向脾脏延伸。Yandza 等[33]曾将狗作为实验动物模型,但其做法一直备受实验动物伦理所争议。不论是狗还是猪等其他动物均涉及实验动物伦理的问题。如何减少实验动物痛苦的同时还能完整地进行手术实验操作也是需要考虑的问题。
这些问题不仅仅是训练ERCP 活体动物模型可能遇到的问题,也是应用活体实验动物开展其他研究会遇到的痛点。因此还需要和动物学相关领域联合,继续寻找既能满足拥有和人类一致的胆胰系统解剖结构同时还具有廉价易得特点的实验动物。
2.5 离体动物操作模型的现况
由于活体动物模型需要长期的喂养以及管理,需要较高的费用。且在活体实验动物模型中可进行操作的次数十分有限,无法满足大量的训练要求。
在1997 年,由Hochberger 等[44]首次提出可以使用特定的离体猪标本作为内窥镜操作训练模型。在一定程度上解决了上述问题。同年,Hochberger等[45]提出由动物组织重建模拟十二指肠乳头组织,但仍然存在无法同步进行透视操作的弊端。2006 年,Matthes 等[40]提出把鸡心脏组织固定在十二指肠上模拟Oddi 括约肌,用猪的髂动脉或脾动脉血管模拟胆胰管。在研究中也指出离体动物训练模型所具有的特点:与活体动物有类似的生理解剖环境、避免实验动物伦理问题、进一步降低经济成本。由于猪的髂、脾动脉也不是常见易得的动物器官,还是会产生较高的成本,需进一步改进。为了更加能够模拟真实临床场景,2007 年,Maiss 等[46]通过提前将离体气管覆盖在乳头上,增加模拟真实性,再进行ERCP 操作的模拟训练模型。这增加了操作模型的真实性。2013 年,Itoi 等[47]可以在猪的离体胃或直肠中加入用氯化钠稀释的透明质酸,然后在黏膜下次重建十二指肠乳头,提高模型 使用率。2014 年,Velázquez-Aviña等[48]提出了新的猪胃十二指肠化的方法,还创新性地使用猪的气管代替髂动脉模拟胆管,在鸡心脏上覆盖了猪的食管,这样做更可以模拟真实的解剖情况。在“乳头”中放入支架和导丝,增加其稳定性和便于根据不同训练需求更换乳头模型,反复利用[48]。2016 年,Artifon 等[49]又对鸡心脏模拟十二指肠乳头的ERCP 训练模型进行教学评估,对这种模型的教学意义给予了很大的肯定,其廉价性和可以更换乳头的特点非常适用作为教学训练模型。
现在部分ERCP 操作训练仍然在使用这种离体动物模型:它可在高度模拟操作环境的同时还可以进行反复训练操作,不论是经济性还是真实性都具有不错的表现。如果想进一步发展可以和上文提到的其他模型相结合,创造出一个联合几类模型优点的混合模型。
2.6 离体动物模型现存的问题
离体动物模型虽然解决了经费高昂的问题,增加了模型可重复操作次数,但是也存在下述问题:⑴ 与活体动物模型相似,所有关于动物的实验操作都涉及实验动物伦理的问题。⑵ 缺乏真实性和不能提供ERCP 操作完整性训练。无法完整地进行ERCP 操作就无法验证手术真实的效果以及对内置物进行生物安全性和组织相容性结果的评定,更无法进一步模拟真实临床场景中可能遇到的应对措施。
3 ERCP训练模型的总结与思考
不同模型特点的总结见表1。ERCP 训练模型可以从很多方面进行评价,如Sedlack 等[23]在2003 年发布了评估表从:⑴ 模型组织是否柔软;⑵ 乳头的解剖结构;⑶ 视觉真实感;⑷ 插管真实感;⑸ 整体ERCP 操作体验等几个方面对ERCP 训练模型进行初步评估。模型的真实性主要是要在组织学、局部结构,特别是适应内镜造模的整体结构上进行评估。因此,在材料方面可以进行改进,根据之前的文献报道,可以使用3D 打印技术来模拟胆胰管,进一步增加解剖真实性[50-51]。除了3D 打印出胆胰管以外,还可以打印出乳头模型,内部运用物理弹簧模型等模拟出人十二指肠乳头的生理特性,增加机械模型的应力性和真实性。也可以将机械模型和离体动物模型相结合,创造联合模型。
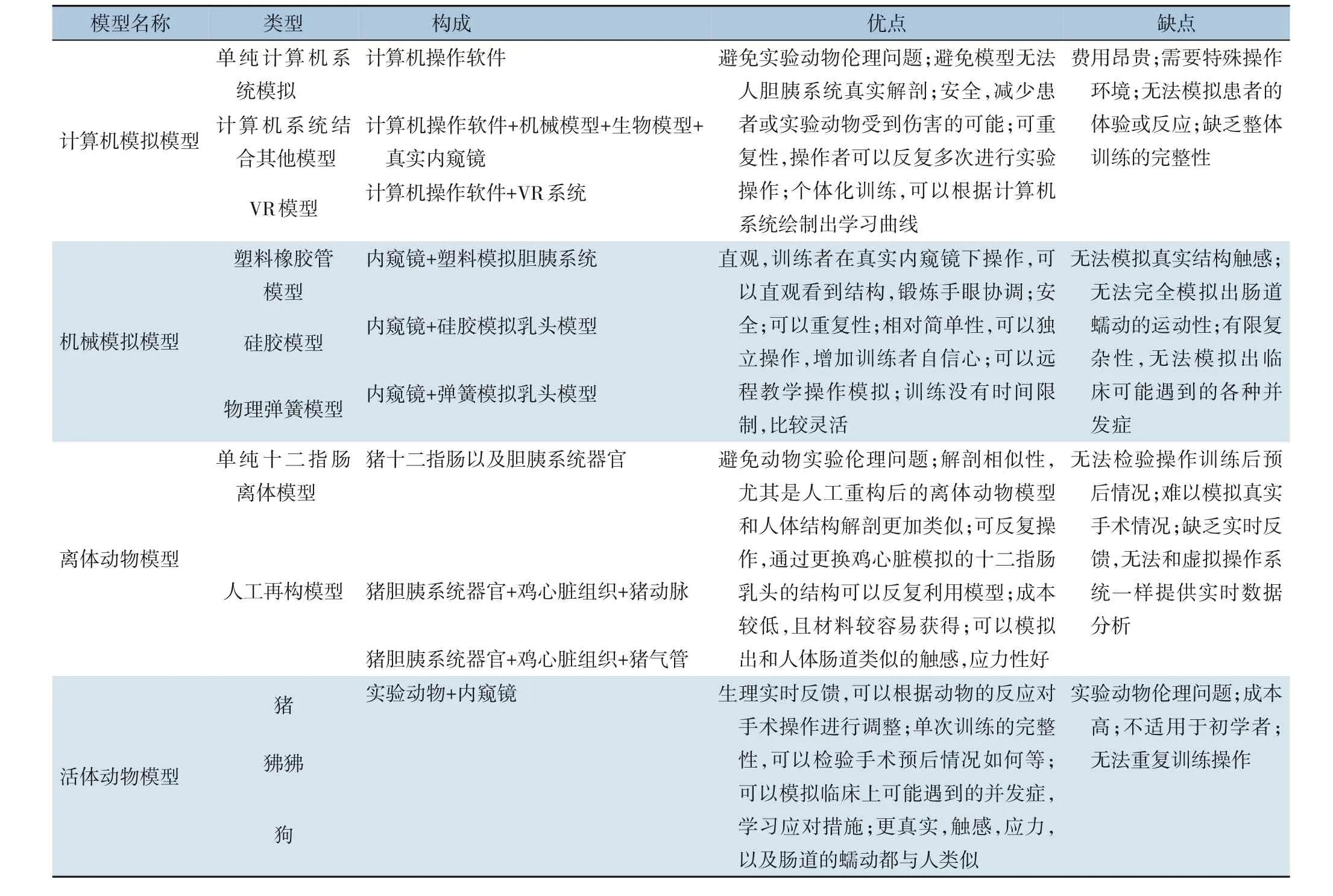
表1 各种训练模型特点总结Table 1 Summary of characteristics of different training models
4 五阶段ERCP训练法
根据具体训练要求以及可提供的经费可以选择不同的训练模型,并且根据不同模型的优势和不足以及操作者训练目标的差异选择分阶段联合训练模型的使用。笔者根据这些特点提出五阶段ERCP 训练法。
第一阶段为机械模型联合离体动物模型。适用范围:初学者、训练经费有限的机构。优点:机械模型和离体动物模型所需要的经费以及操作难度都较低,适合初学者来熟悉ERCP 具体操作流程以及不同结构的解剖位置和触感。训练目标:熟悉ERCP 操作流程,学会使用内窥镜的使用以及不同结构的解剖位置和触感。第二阶段为离体动物模型联合计算机模拟模型。适用范围:有一定操作训练基础者。优点:使用计算机模型可以进一步增加视觉模拟的真实性,同时联合使用离体动物模型以及机械模拟局部结构,使模型触觉更真实。训练目标:熟练掌握ERCP 具体操作,能够完成计算机模拟模型系统中不同适应证的操作训练。第三阶段为离体动物模型联合VR 计算机模拟模型。适用范围:有较多模拟训练经验者、经费相对充足机构。优点:VR 的视觉反馈比单纯计算机模拟视觉反馈好很多,并且可以使操作者立体地感受具体手术入路以及解剖关系,了解不同特异性个体可能产生的解剖差异性,从而减少因操作失误带来的并发症。训练目标:熟练掌握ERCP具体操作,操作过程中较少出现操作失误次数。第四阶段为活体动物模型。适用范围:熟练掌握ERCP 操作者、需要检验术后并发症效果、需要探究生物安全性、植入物的组织相容性等、能够饲养实验动物机构。优点:使用活体动物模型可以训练面对不同并发症的处理操作,更贴合真实的临床情况。还可以检验生物安全性以及组织结构相容性等特点。训练目标:熟练掌握ERCP 不同并发症的应对措施。第五阶段为活体动物模型联合AI 分析。适用范围:需要AI 评估操作评价和预测并发症发生概率、经费充足机构。优点:加入AI 分析模型可以实时反馈给操作者操作数据,以及每一次操作可能带来的并发症概率。操作者可以通过AI 分析进一步改良操作细节,减少并发症的发生。训练目标:极大程度降低因操作产生的并发症发生概率。上述五阶段ERCP 训练法的总结见表2。
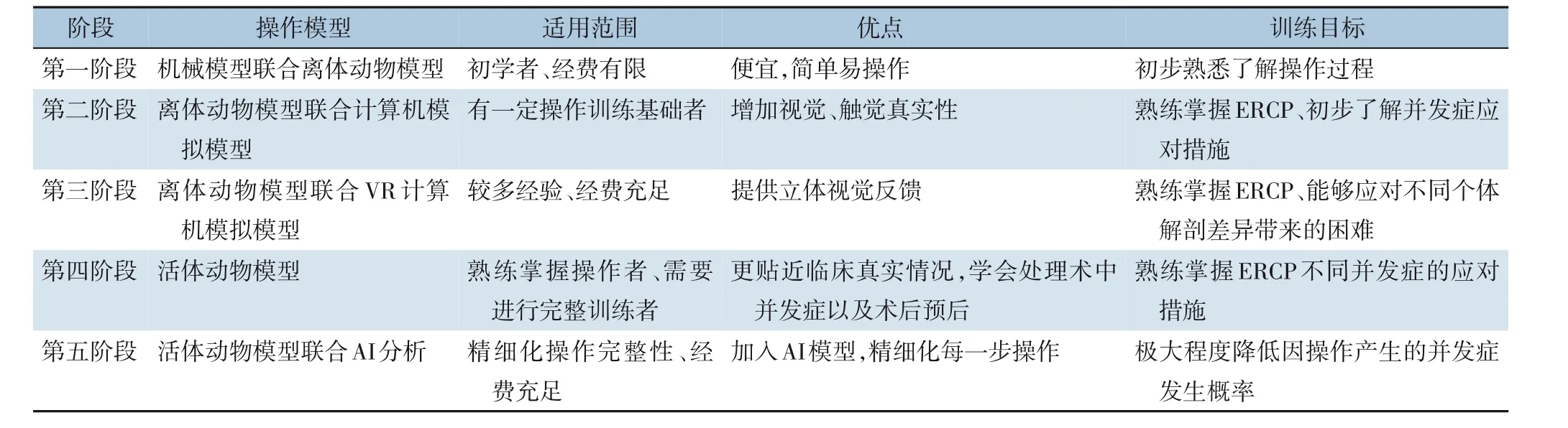
表2 ERCP五步训练法Table 2 The five-stages training method for ERCP
五阶段法的提出除了考虑到了不同模型的特点,也将全球ERCP 训练标准进行结合,因此五阶段除了具有经济实惠,对各种模型的优点进行集合的优点外,也能最大程度上符合训练学习循序渐进的特点,对不同阶段的训练者都能有较大的适配度。
5 ERCP训练模型发展的新方向
目前,元宇宙已成为虚拟世界与真实世界结合的平台,将带动社会生产力提升、生产关系变革。因此,在计算机模拟方面还可以和元宇宙相联合,研究开发在元宇宙引擎的基础上,增加能够模拟ERCP 训练操作的模块,还可以建立不同操作者个体性的训练学习曲线档案,并使用AI 分析操作者的每一次训练记录的效果和需要改进的操作,缩短学习时限,减少因为操作而产生的并发症。目前已经有工业元宇宙的AI 数字人生成与数字孪生技术运用在医学训练相关领域。
另外,寻找合适的活体动物模型也十分重要。在活体动物进行ERCP 操作后可以进一步评价手术的完成度以及预后效果,如预后出现胰腺炎并发的概率是多少,以及出现并发症的处理操作训练,更能体现一次ERCP 手术训练的完整性。也可以进一步训练各种ERCP 适应证的不同操作。因此,找到一种特殊能满足进行ERCP 手术且价格、生理解剖与人类极度类似的实验动物十分重要。但经过对实验动物学领域相关文献的查阅,仍没有发现适合动物种类。也可以通过基因编辑[52]或细胞因子诱导现成的实验动物,使其胆胰系统解剖发生改变成更能模拟人类生理状态下的解剖结构。
综上所述,目前已投入使用的ERCP 训练模型种类很多,涉及多学科交叉、技术融合创新等特点,相信在不久的将来会出现更多更出色的ERCP训练模型。
利益冲突:所有作者均声明不存在利益冲突。
作者贡献声明:李锦阳负责撰写论文、文章框架设计与修改;王玮琛、谢婉莹负责国内外研究进展调研;陈晓晓,谭淞文负责文献管理、对文章内容进行审阅批改;何超、刘威、熊力、负责拟定写作思路并指导撰写论文、最后定稿。
猜你喜欢
肝博士(2021年1期)2021-03-29 02:32:08
华人时刊(2020年21期)2021-01-14 01:33:36
保健医苑(2020年1期)2020-07-27 01:58:26
山东林业科技(2019年2期)2019-06-03 10:10:54
无线互联科技(2018年20期)2018-12-27 11:36:00
现代园艺(2017年11期)2017-06-28 11:32:46
奥秘(2016年10期)2016-12-17 13:13:11
温州医科大学学报(2016年9期)2016-10-31 07:47:26
哈尔滨医药(2015年4期)2015-12-01 03:58:01
筑路机械与施工机械化(2015年10期)2015-11-07 17:49:05
