
基于全球卫星导航系统的海洋环境监测方法研究综述
2024-04-29 13:39:22漆随平徐晓飞厉运周王军成杜珺
山东科学 2024年2期
关键词:海洋环境
漆随平 徐晓飞 厉运周 王军成 杜珺

摘要:实时、准确、可靠地监测海洋环境信息,对于海洋灾害预警预报、防灾减灾、海洋资源开发、保障海洋安全等具有至关重要的作用。近年来,随着全球卫星导航系统(GNSS)不断发展与升级,基于GNSS导航信号进行大气和海洋环境信息探测发展成为新技术新方法,并成为海洋环境监测技术研究热点,已在海洋气象监测、数值预报、科学研究等领域得到了广泛应用。系统综述了GNSS技术在海面有效波高、风速、降雨强度、水汽及潮位监测等海洋环境监测领域的应用研究现状,对新技术新方法进行了系统总结,并对未来发展趋势进行了展望,以期对相关领域的研究提供参考。
关键词:全球卫星导航系统;海洋环境;有效波高;降雨强度;海面风;水汽监测
中图分类号:P714;P228 文献标志码:A 文章编号:1002-4026(2024)02-0001-11
Review of marine environment monitoring methods based on GNSS technology
Abstract∶Real-time, accurate and reliable monitoring of marine environmental information plays a crucial role in marine disaster warning and prediction, disaster prevention and reduction, marine resource development, and ensuring marine safety. In recent years, with the continuous development and upgrading of global navigation satellite systems (GNSS), the detection of atmospheric and marine environmental information based on GNSS navigation signals has become a new method and a hot research topic in the marine environmental monitoring technology. This method has been widely applied to domains such as marine meteorological monitoring and numerical forecasting. This article systematically reviews the current research status of the GNSS technology in marine environmental monitoring, including effective wave height, wind speed, rainfall intensity, water vapor and tide level monitoring. Furthermore, this paper systematically summarizes new technologies and methods and looks forward to provide reference for the future research in related fields.
Key words∶GNSS; significant wave height; rainfall intensity; sea-surface wind speed; water vapor monitoring
我國是一个海洋大国,海洋在经济发展和国家安全中的作用愈加突显 [1-2]。海洋环境监测是关心海洋、认识海洋和经略海洋的重要保障,为政府和业务部门提供决策依据,保障海洋活动安全利益和人员生命财产安全 [3-4]。海洋资料浮标等海洋环境原位监测手段,具有可靠性高、实时准确等特点,可基本满足常规海洋监测需求[5],微波辐射计、雷达高度计和无线电探空仪等新技术也被广泛用于海洋环境监测中,但是这些技术却存在空间监测范围有限等不足,卫星遥感海洋环境监测虽然具有空间范围广等优点,但其空间分辨率较低[6-8]。
近30年,随着全球卫星导航系统(global navigation satellite system,GNSS)飞速发展,在用于全球定位、导航和授时服务的同时,开始用于监测海洋环境信息[9-13]。二十世纪九十年代,欧洲空间局学者Martín-Neira [14]首次提出利用GNSS反射信号(GNSS reflectometry,GNSS-R)反演海况信息的概念。美国及我国科学家也都相继开展了GNSS-R的实验验证和理论研究,并已将其成功应用于海面高度、有效波高和海面风场等估算 [15-20]。此外,美国科学家Bevis [21-22]提出利用GNSS直射导航信号反演大气水汽信息,形成了GNSS气象学概念,其后基于GNSS的大气水汽监测研究得到国内外众多学者的关注。
鉴于GNSS信息在海洋区域环境信息监测中的重要作用,本文综述了基于GNSS的海面有效波高、风速、降雨强度、水汽及潮位监测等方面的研究进展,并对未来发展趋势进行了展望,以期对本领域的研究人员有所借鉴。
1 GNSS有效波高反演
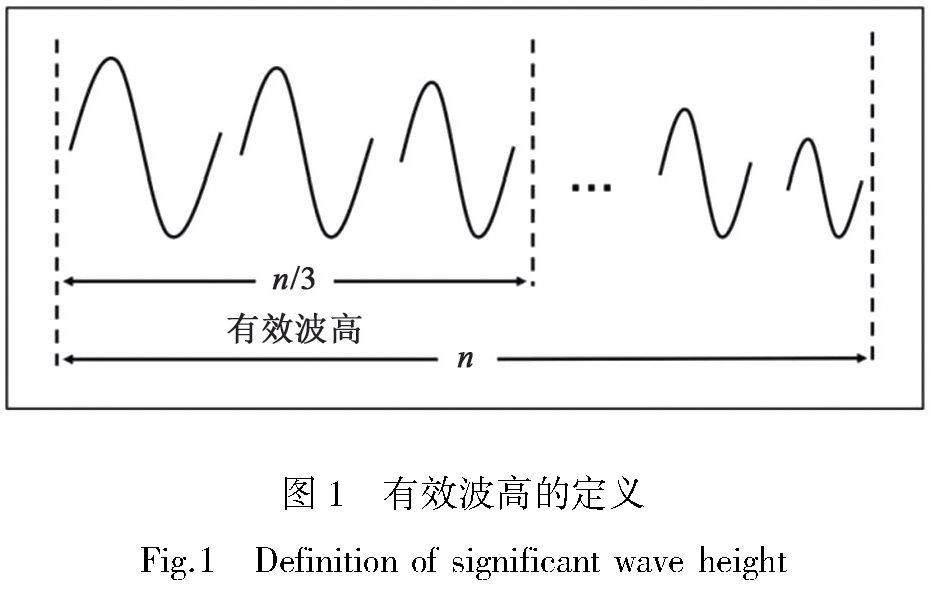
有效波高(significant wave height,HSWH)是多个海浪波高值从小到大排序后,前三分之一海浪波高值的平均值[23],如图1所示。有效波高是重要的海洋环境监测信息,它在船舶调度、航行安全及实时信息感知中具有极其重要的作用。
HSWH的变化可反映出海面粗糙度的变化,而在海面粗糙度发生变化时,GNSS反射信号的波形、极化特性、相关性和幅值等特性也随之变化。因此,利用GNSS直射和反射信号可提取出与海面粗糙度相关的特性,便可反演出HSWH信息。其中,基于干涉复数场(interferometric complex field,ICF)的有效波高反演算法是一种最为常用的方法。下面对ICF有效波高反演原理进行阐述。
利用右旋极化天线接收的GNSS直射信号时间序列和左旋极化天线接收机的GNSS反射信号时间序列,进行干涉处理,便可得到ICF函数:
式中,FDt表示直射信号波形幅度最大处的复数值,FRt表示反射信号波形幅度最大处的复数值,FIt代表ICF函数。值得注意的是,GNSS直射信号在这里主要是用来消除与海洋运动无关的项。
若将ICF相关时间τz定义为自相关函数的时间宽度,即:
ΓΔt=〈FItFIt+Δt〉z,(2)
式中,ΓΔt代表ICF自相关函数。
在海面高度服从高斯概率分布的条件下,τz与波浪方向不相关。因此,假设海面高度服从高斯概率分布,那么τz可近似为如下形式:
式中,σz为海面高度标准差,lz为海表自相关长度,θ为GNSS卫星仰角,Gr为天线增益。
因此,τF可以看作这个高斯函数的二阶矩:
其中,
k=2π/λ,(5)
式中,λ表示GNSS载波信号波长值。
Soulat[15]利用海浪谱提出了一种深海场景下有效波高反演模型:
式中,HSWH0表示有效波高偏移值,γ表示尺度因子,as和bs均为模型系数。
针对近海场景难以通过海浪谱推导出有效波高和相关事件的关系式的问题,有学者使用有效相关时间的概念,构建了一个有效波高反演经验模型[24]:
式中,a,b和c均为待定系数,其推荐参考值为a=0.003 8, b=-0.073 3, c=0.826 7。
此外,还有许多学者利用干涉图技术(interference pattern technique,IPT)和延遲多普勒图(delay Doppler maps,DDM)载噪比信息实现了海面有效波高估算[25-26]。值得注意的是,上述几种方法估算HSWH均需用到至少两个GNSS天线,右旋极化GNSS天线用来收集直射导航信息,左旋极化GNSS天线采集反射信号,使用成本相对较高。
近年来,GNSS干涉反射(GNSS interferometry reflectometry,GNSS-IR)遥感技术被提出,该技术通过分离接收到的信噪比(signal noise ratio,SNR)观测值中的反射(多径)信号分量来估计反射面特性,无需额外的左旋极化天线,使用成本相对较低。因此,有学者基于地基GNSS观测站围绕GNSS-IR技术反演HSWH信息开展了研究,并取得了一些有益成果。
2 GNSS海面风场反演
1998年,美国国家航空航天局(national aeronautics and space administration,NASA)科学家指出GPS(global positioning system)反射信号可以用于监测海面风速信息[27]。随后,美国科罗拉多大学的学者在2000年将GNSS导航信号的功率建模作为几何参数和环境参数的函数,建立了GNSS DDM二维相关功率模型[16],该模型为机载GNSS-R反演风速提供了理论基础。GNSS DDM二维相关功率模型也被称为Z-V模型,其数学表达式为[16,28]:
其中,
Zavorotny等[28]给出了归一化的海表双基雷达散射截面的详细计算公式:
式中,R代表菲尼尔反射系数,q表示散射单位向量,其水平分量和垂直分量分别为qz和q⊥,P·为概率密度函数。
围绕Z-V模型,国内外科研机构学者陆续开展了机载平台、星载平台和船载平台的GNSS-R反演海面风速研究[29-35]。此外,基于单天线GNSS-IR技术,王笑蕾等[36]详细介绍了地基GNSS-IR估算海面风速原理,证实了可以利用SNR估算海面风速。近年来随着人工智能技术的飞速发展,人工神经网络、卷积神经网络和多模态深度学习网络等机器学习算法被逐渐应用于GNSS-R海面风速反演当中,并取得了精度较高的估算结果[37-41]。
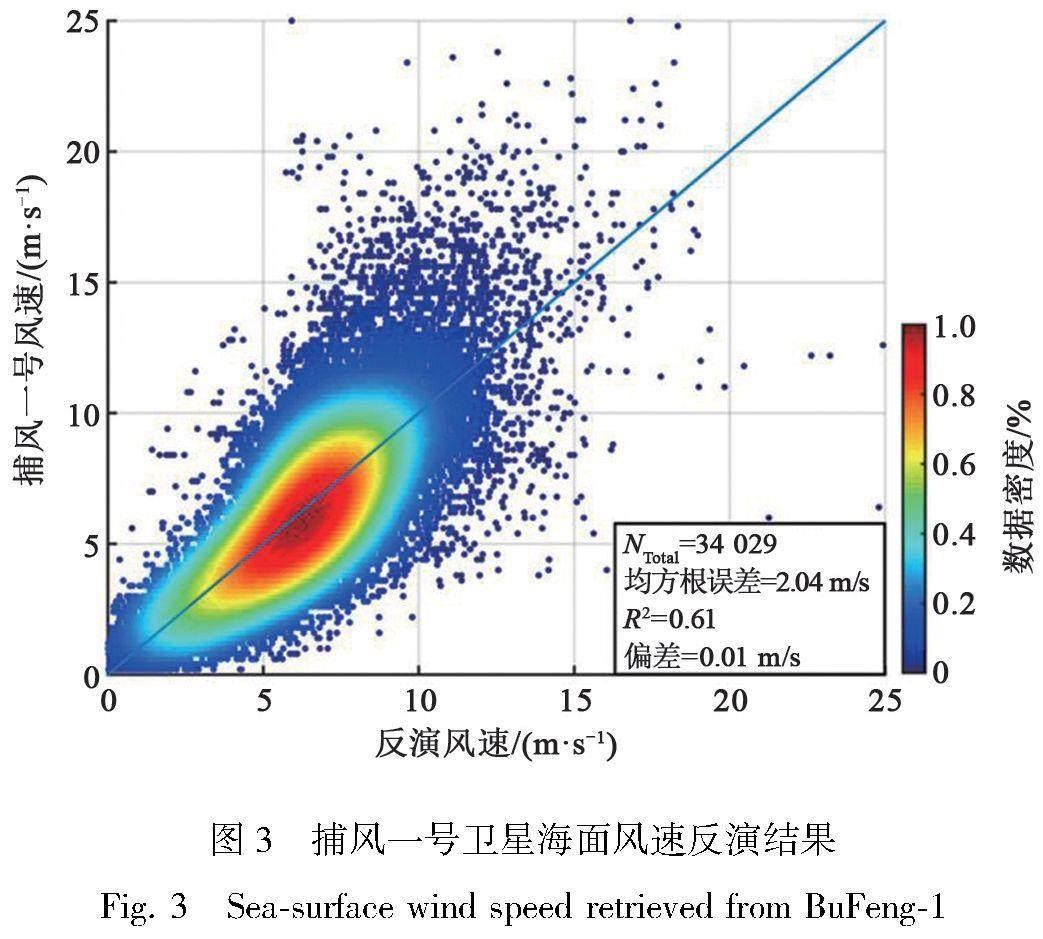
此外,为实现海洋区域大范围风速测量,英国和美国相继发射了TechDemoSat-1(TDS-1)卫星和旋风全球导航卫星系统(cyclone GNSS,CYGNSS)卫星,给海面风速反演研究带来了巨大机遇[30,38]。而我国也在近几年成功发射捕风一号A/B和风云三号系列卫星,旨在完成海洋参数反演和大气监测等任务。图3为捕风一号卫星海面风速反演结果[42]。
3 GNSS海面降雨强度反演
降雨强度信息是重要的海洋环境参数之一,也是天气预报、气象研究和航行安全的重要支撑。近年来国内外相关学者逐步开展了GNSS-R反演降雨信息研究。
Asgarimehr等[43]开创了基于GNSS-R技术获取海面降雨信息研究的先河,该研究分析了GNSS-R时延多普勒图(delayed Doppler map,DDM)数据中的降雨信息特征,证明了由于雨滴落到海表会改变海洋表面波浪,GNSS-R能够反演弱风条件下海面降雨信息。随后,Balasubramaniam等[44]利用CYGNSS DDM数据也开展了类似研究。图4给出了基于GNSS-R估算降雨强度的示意图[43]。
此外,布金伟[45]对星载GNSS-R技术反演降雨强度方法进行了系统研究,提出了三维快匹配滤波算法的DDM降噪模型,利用支持向量机、随机森林和卷积神经网络等机器学习算法实现了海面降雨强度检测,并取得了良好的估算精度。
4 GNSS海面水汽反演
基于GNSS技術解算大气可降水量(precipitable water vapor, PWV)参数的技术主要有双差网解法和精密单点定位(precise point positioning,PPP)两种[8]。由于海面多为移动平台,无法满足双差网解的观测条件,因此其暂时无法满足海面PWV信息探测要求。而PPP技术仅需单台设备即可实现全球范围灵活作业[46],不需要额外布设基准站,模型简单,解算效率高,因而自其概念提出以来,就被广泛应用到了海面PWV信息探测 [47-48]。基于PPP技术的PWV估算及研究进展简述如下。
GNSS伪距和载波相位观测值可以写为:
其中,
式中,Psi和Lsi分别为伪距和相位观测值,ρs表示卫星端至接收机端的几何距离,t和ts分别代表接收机端和卫星端误差,Ts和Isi分别表示对流层延迟和电离层延迟,λi和Ni分别为波长和整周模糊度,bi和Bi分别为接收机端伪距偏差和相位偏差,bsi和Bsi分别表示卫星端伪距偏差和相位偏差,εPi表示伪距观测噪声与未模型化误差之和,εLi表示相位观测噪声与未模型化误差之和。
对流层延迟包括干分量和湿分量两部分,这两部分均可以表示为天顶延迟和映射函数的乘积:
Tsr=Mshr·Zhr+MswrZwr+cot eGN·cos a+GE·sin a,(14)
式中,Zhr和Zwr分别表示干延迟和湿延迟,对应的映射函数分别为Mshr和Mswr,GN表示南北向大气延迟梯度参数,GE表示东西向大气延迟梯度参数,e和a为卫星高度角和方位角。在进行PPP数据处理时,通常采用Saastamoinen模型[49]和气象数据对干延迟进行改正,仅估计湿延迟的改正数即可。
从GNSS伪距和相位观测方程出发,根据不同观测值组合方式,可以构造出不同PPP解算模型,常用的PPP模型主要有无电离层组合模型[46]和非差非组合模型[50]两种。采用精密卫星产品对轨道误差、卫星钟误差等进行改正,然后利用序贯最小二乘或卡尔曼滤波等参数估计器,便可估计出对流层干延迟Zwr,再将干延迟转换为大气可降水量(PWV):
大气可降水量=Π·Zwr,(15)
其中,
式中,Rw表示水汽气体常数,常取值为461.495 J·kg·K-1,ρv表示液态水密度,k′2和k3均为大气折射率常数,Tm表示加权平均温度。
初期的PPP技术估算PWV只能采用国际GNSS服务(international GNSS service,IGS)发布的精密卫星产品进行事后解算。为满足实时应用需求,IGS发布了PPP实时服务,许多学者针对基于实时PPP的PWV反演进行了试验验证与评估 [51-52]。随着美国GPS、俄罗斯GLONASS、欧盟Galileo和我国BDS-3星座的发展与升级,相关学者围绕多系统GNSS水汽监测开展了研究,结果表明采用多系统能够有效克服单系统解算稳定性的问题,提升水汽精度[53-55]。
5 潮位变化监测
潮位变化信息是海洋观测系统和气候变化研究的关键要素。近年来,利用GNSS-IR新型技术遥感潮位变化已成为GNSS应用领域新的研究热点之一。图5给出了GNSS-IR反演潮位原理[56],该技术通过对岸基GNSS台站SNR观测数据进行谱分析,可以估算出潮位变化信息,其算法详细介绍如下。
SNR信噪比的定义为信号振幅与噪声振幅的比值(S/N),可以用来衡量接收机接收信号的功率强弱。
(S/N)2=A2c=A2D+A2R+2ADARcos φ,(17)
式中,Ac表示叠加信号振幅,AD和AR分别为直射信号和反射信号幅值,φ为直射信号与反射信号之间的相位延迟。值得注意的是,测地型GNSS接收机一般内置抑制多路径算法,这使得直射信号幅值和反射信号幅值相差较大。因此,在数据处理时,可以采用曲线多项式拟合扣除直射信号。
进而,可以得到反射信号振幅的周期项:
(S/N)R=Acos 2πft+φ,(18)
其中,
式中,(S/N)R代表信噪比观测值反射信号分量,θh代表卫星高度角,λ表示载波波长,h表示天线至反射面的垂直距离,A为振幅,φ代表相位。
观察式(18)可以看出,频率信息f与天线相位中心知反射面的垂直距离直接相关。在实际数据处理时,可以用Lomb-Scargle谱分析方法提取出频率信息,从而通过式(19)可以得到垂直距离h。最后,可以通过下式提取出潮位变化量:
htide=h0+H0,tide-h,(20)
式中,htide表示反演得到的潮位信息,h0和H0,tide表示参考时刻垂直距离和参考时刻实测潮位值,h为测到的垂直距离。
在实际GNSS-IR数据处理时,仅能采用GNSS卫星低高度角SNR观测值,导致潮位监测的时间分辨率和估算精度受限。鉴于此,有学者通过多星GNSS融合解算或采用机器学习算法克服此不足,使得分辨率和精度得到提高 [57-59]。
6 海冰探测
海冰探测对冰情评估、气候变化研究、气候预测和海上交通决策等具有重要意义。近些年, 使用GNSS测量技术在海冰探测方面的研究取得了显著的成果。海冰探测的基本原理是利用GNSS 传输信号的反射入射特性获取海冰特性参数[60],GNSS卫星发射的直射信号极化方式通常为右旋圆极化,当GNSS卫星直射信号入射到海面时,经过海面发生反射,在较高的高度角时反射回来的信号极化方式主要为左旋圆极化。在空气、海冰和海水的界面处,电磁波的反射与入射的能量关系由菲涅尔反射系数确定。根据海水和海冰的介电常数不同,GPS 卫星信号经过不同厚度的海冰时反射信号的右旋分量和高度角的变化存在一定的关系,由此可得到海冰厚度。
早在1998年,研究者通过机载GPS反射信号得到了向前散射的GPS反射与RADARSAT的向后散射测量相关性是一致的结果, 根据发射信号特征的差异得到了海冰特征参数,在北冰洋西北部巴罗地区进行机载监测海冰实验,表明GPS信号可以提供海冰信息[61]。2003年, Wiehl等[62]建立了海冰GPS反射信号模型, 利用模型及冰表面反射的GPS信号,提取海冰内部结构及结冰过程等信息。张云等[63]利用GNSS信号的极化模型得到幅度极化比值的变化与海冰的形成和消融过程中海冰的密集程度之间的关系。文献[64-65]分别用GNSS反射信号实现了海冰厚度和海冰边界的探测,表明海冰探测已经到了技术稳定的阶段。
7 总结与展望
围绕GNSS在海面环境要素遥感中的应用,本文综述了基于GNSS直射/反射信号的有效波高估算、海面风速反演、降雨强度监测、大气水汽反演以及潮位监测研究现状与进展。总结与展望如下:
基于GNSS-R/IR的有效波高估算、海面风速反演、降雨强度监测和潮位变化监测技术较为成熟,取得了较好的反演精度。但是现有研究大多基于岸基和星基GNSS平台,后续针对海洋资料浮标、船舶等海洋观测平台上利用GNSS进行海洋环境信息探测有望成为研究热点,将突破性地拓展传统的业务化现场观测平台的观测能力,将在海洋环境业务化监测中具有广泛的应用前景。此外,联合多GNSS星座和多频率观测值提升反演分辨率和性能也应重点关注。由于利用机器学习的GNSS海面环境信息反演结果会受到训练数据样本分布的影响,因此如何进一步提升反演模型泛化能力也将是未来研究的重点。
当前基于实时精密单点定位的海面水汽反演已较为成熟,且在短临降雨预警及台风等领域进行了大量研究探索。但在海洋中实现测站空间加密困难,导致海面水汽信息的时空分辨率受限。因此,未来应联合多种水汽探测技术,解决高失控分辨率水汽获取问题。此外,GNSS水汽信息在海洋领域的应用场景依然偏少,如何进一步拓展水汽应用场景至关重要。
此外,我国的北斗三号全球系统正式开通,除提供全球导航定位和授时服务外,还为用户提供短报文通信和精密单点定位增强服务等多种特色服务。因此如何充分利用北斗三号的优势,挖掘北斗系统在海面环境信息遥感中的应用将是未来科学的重要工作。
参考文献:
[1]“中国海洋工程与科技发展战略研究”项目综合组. 世界海洋工程与科技的发展趋势与启示[J]. 中国工程科学, 2016, 18(2): 126-130. DOI: 10.3969/j.issn.1009-1742.2016.02.019.
[2]王军成, 孙继昌, 刘岩, 等. 我国海洋监测仪器装备发展分析及展望[J]. 中国工程科学, 2023, 25(3): 42-52. DOI: 10.15302/J-SSCAE-2023.07.024.
[3]王军成. 新一代海洋监测技术:综合智能观测浮标[J]. 智能系统学报, 2022, 17(3): 447.
[4]王军成, 厉运周, 杨英东, 等. 海洋资料浮标姿态信息测量技术研究现状及发展趋势[J]. 海洋与湖沼, 2023, 54(5): 1239-1247. DOI: 10.11693/hyhz20230300054.
[5]LI Y Z, WANG J C. Technical development of operational in situ marine monitoring and research on its key generic technologies in China[J]. Acta Oceanologica Sinica, 2023, 42(10): 117-126. DOI: 10.1007/s13131-023-2207-5.
[6]漆随平, 厉运周. 海洋环境监测技术及仪器装备的发展现状与趋势[J]. 山东科学, 2019, 32(5): 21-30. DOI: 10.3976/j.issn.1002-4026.2019.05.002.
[7]姚宜斌, 趙庆志. GNSS对流层水汽监测研究进展与展望[J]. 测绘学报, 2022, 51(6): 935-952.
[8]张克非, 李浩博, 王晓明, 等. 地基GNSS大气水汽探测遥感研究进展和展望[J]. 测绘学报, 2022, 51(7): 1172-1191.
[9]宁津生, 姚宜斌, 张小红. 全球导航卫星系统发展综述[J]. 导航定位学报, 2013, 1(1): 3-8. DOI: 10.16547/j.cnki.10-1096.2013.01.005.
[10][ZK(#]杨元喜, 任夏, 贾小林,等. 以北斗系统为核心的国家安全PNT体系发展趋势 [J]. 中国科学:地球科学, 2023, 53(5): 917-927.
[11]白伟华. GNSS-R海洋遥感技术研究[D]. 北京: 中国科学院研究生院(空间科学与应用研究中心), 2008.
[LM]
[12]万玮, 陈秀万, 彭学峰, 等. GNSS遥感研究与应用进展和展望[J]. 遥感学报, 2016, 20(5): 858-874. DOI: 10.11834/jrs.20166228.
[13]金双根, 张勤耘, 钱晓东. 全球导航卫星系统反射测量(GNSS+R)最新进展与应用前景[J]. 测绘学报, 2017, 46(10): 1389-1398. DOI: 10.11947/j.AGCS.2017.20170282.
[14]MARTN-NEIRA M. A pasive reflectometry and interferometry system (PARIS) application to ocean altimetry[J]. Environmental Science, 1993,17(4): 331-55.
[15]SOULAT F, CAPARRINI M, GERMAIN O, et al. Sea state monitoring using coastal GNSS-R[J]. Geophysical Research Letters, 2004, 31(21):L21303. DOI: 10.1029/2004gl020680.
[16]ZAVOROTNY V U, VORONOVICH A G. Scattering of GPS signals from the ocean with wind remote sensing application[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(2): 951-964. DOI: 10.1109/36.841977.
[17]周兆明, 符养. 渤海GNSS-R机载测风试验及其反演结果[J]. 武汉大学学报(信息科学版), 2008, 33(3): 241-244.
[18]杨东凯, 张益强, 张其善, 等. 基于GPS卫星信号的海面风场遥感方法研究与实现[J]. 遥感信息, 2006, 21(3): 10-12. DOI: 10.3969/j.issn.1000-3177.2006.03.004.
[19]WANG X L, HE X F, ZHANG Q. Evaluation and combination of quad-constellation multi-GNSS multipath reflectometry applied to sea level retrieval[J]. Remote Sensing of Environment, 2019, 231: 111229. DOI: 10.1016/j.rse.2019.111229.
[20]WANG X L, HE X F, SHI J, et al. Estimating sea level, wind direction, significant wave height, and wave peak period using a geodetic GNSS receiver[J]. Remote Sensing of Environment, 2022, 279: 113135. DOI: 10.1016/j.rse.2022.113135.
[21]BEVIS M, BUSINGER S, HERRING T A, et al. GPS meteorology: remote sensing of atmospheric water vapor using the global positioning system[J]. Journal of Geophysical Research: Atmospheres, 1992, 97(D14): 15787-15801. DOI: 10.1029/92jd01517.
[22]BEVIS M, BUSINGER S, CHISWELL S, et al. GPS meteorology: mapping zenith wet delays onto precipitable water[J]. Journal of Applied Meteorology, 1994, 33(3): 379-386. DOI: 10.1175/1520-0450(1994)033<0379: gmmzwd>2.0.co;2.
[23]张云, 肖盛, 姜丽菲,等. 基于多变量机器学习的CYGNSS有效波高反演模型 [J/OL]. 北京航空航天大學学报.[2024-01-29].https://bhxb.buaa.edu.cn/bhzk/article/doi/10.13700/j.bh.1001-5965.2023.0265
[24]邵连军, 张训械, 王鑫, 等. 利用GNSS-R信号反演海浪波高[J]. 武汉大学学报(信息科学版), 2008, 33(5): 475-478.
[25]ALONSO-ARROYO A, CAMPS A, PARK H, et al. Retrieval of significant wave height and meansea surface level using the GNSS-R interference pattern technique: results from a three-month field campaign[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(6): 3198-3209. DOI: 10.1109/TGRS.2014.2371540.
[26]王诗博, 李颖, 秦凌宇. 基于延迟多普勒图像的GNSS-R有效波高反演方法[J]. 光学精密工程, 2022, 30(8): 1011-1017. DOI: 10.37188/OPE.20223008.1011.
[27]GARRISON J L, KATZBERG S J, HILL M I. Effect of sea roughness on bistatically scattered range coded signals from the Global Positioning System[J]. Geophysical Research Letters, 1998, 25(13): 2257-2260. DOI: 10.1029/98gl51615.
[28]ZAVOROTNY V U, GLEASON S, CARDELLACH E, et al. Tutorial on remote sensing using GNSS bistatic radar of opportunity[J]. IEEE Geoscience and Remote Sensing Magazine, 2014, 2(4): 8-45. DOI: 10.1109/MGRS.2014.2374220.
[29]CLARIZIA M P, RUF C S, JALES P, et al. Spaceborne GNSS-R minimum variance wind speed estimator[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(11): 6829-6843. DOI: 10.1109/TGRS.2014.2303831.
[30]FOTI G, GOMMENGINGER C, JALES P, et al. Spaceborne GNSS reflectometry for ocean winds: first results from the UK TechDemoSat-1 mission[J]. Geophysical Research Letters, 2015, 42(13): 5435-5441. DOI: 10.1002/2015gl064204.
[31]CARDELLACH E, FABRA F, NOGUS-CORREIG O, et al. GNSS-R ground-based and airborne campaigns for ocean, land, ice, and snow techniques: application to the GOLD-RTR data sets[J]. Radio Science, 2011, 46(06): 1-16. DOI: 10.1029/2011RS004683.
[32]王迎强, 严卫, 符养, 等. 利用机载GNSS反射信号反演海面风速的研究[J]. 海洋学报(中文版), 2008, 30(6): 51-59. DOI: 10.3321/j.issn: 0253-4193.2008.06.006.
[LM]
[33]周旋, 叶小敏, 于暘, 等. 基于GNSS-R的海面风速探测技术研究[J]. 电子与信息学报, 2013, 35(7): 1575-1580. DOI: 10.3724/SP.J.1146.2012.01396.
[34]杨东凯, 刘毅, 王峰. 星载GNSS-R海面风速反演方法研究[J]. 电子与信息学报, 2018, 40(2): 462-469. DOI: 10.11999/JEIT170490.
[35]高涵, 白照广, 范东栋. 基于BP神经网络的GNSS-R海面风速反演[J]. 航空学报, 2019, 40(12): 323261. DOI: 10.7527/S1000-6893.2019.23261.
[36]王笑蕾, 何秀凤, 陈殊, 等. 地基GNSS-IR风速反演原理及方法初探[J]. 测绘学报, 2021, 50(10): 1298-1307. DOI: 10.11947/j.AGCS.2021.20200586.
[37]LIU Y X, COLLETT I, MORTON Y J. Application of neural network to GNSS-R wind speed retrieval[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(12): 9756-9766. DOI: 10.1109/TGRS.2019.2929002.
[38]LI X H, YANG D K, YANG J S, et al. Analysis of coastal wind speed retrieval from CYGNSS mission using artificial neural network[J]. Remote Sensing of Environment, 2021, 260: 112454. DOI: 10.1016/j.rse.2021.112454.
[39]ASGARIMEHR M, ARNOLD C, WEIGEL T, et al. GNSS reflectometry global ocean wind speed using deep learning: development and assessment of CyGNSSnet[J]. Remote Sensing of Environment, 2022, 269: 112801. DOI: 10.1016/j.rse.2021.112801.
[40]高涵, 白照廣, 范东栋. 基于BP神经网络的GNSS-R海面风速反演[J]. 航空学报, 2019, 40(12): 193-201.
[41]喻婷. 基于机器学习的星载GNSS-R海面风速反演模型研究[D]. 南京: 南京信息工程大学, 2023.
[42]JING C, NIU X L, DUAN C D, et al. Sea surface wind speed retrieval from the first Chinese GNSS-R mission: technique and preliminary results[J]. Remote Sensing, 2019, 11(24): 3013. DOI: 10.3390/rs11243013.
[43]ASGARIMEHR M, ZAVOROTNY V, WICKERT J, et al. Can GNSS reflectometry detect precipitation over oceans?[J]. Geophysical Research Letters, 2018, 45(22): 12. DOI: 10.1029/2018gl079708.
[44]BALASUBRAMANIAM R, RUF C. Characterization of rain impact on L-Band GNSS-R ocean surface measurements[J]. Remote Sensing of Environment, 2020, 239: 111607. DOI: 10.1016/j.rse.2019.111607.
[45]布金伟. 星载GNSS-R技术反演海面降雨强度及风速和浪高方法研究[D]. 徐州: 中国矿业大学, 2022.
[46]ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of Geophysical Research: Solid Earth, 1997, 102(B3): 5005-5017. DOI: 10.1029/96jb03860.
[47]范士杰. GPS海洋水汽信息反演及三维层析研究[D]. 武汉: 武汉大学, 2013.
[48]陈冠旭, 刘焱雄, 柳响林, 等. 船载GNSS探测海洋水汽信息的影响因子分析[J]. 武汉大学学报(信息科学版), 2017, 42(2): 270-276. DOI: 10.13203/j.whugis20150028.
[49]SAASTAMOINEN J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites[M]//HENRIKSEN S W, MANCINI A, CHOVITZ B H, eds. The Use of Artificial Satellites for Geodesy. Washington, D. C.: American Geophysical Union, 2013: 247-251. DOI: 10.1029/gm015p0247.
[50]張宝成. GNSS非差非组合精密单点定位的理论方法与应用研究[J]. 测绘学报, 2014, 43(10): 1099. DOI: 10.13485/j.cnki.11-2089.2014.0155.
[51]LI X X, DICK G, GE M R, et al. Real-time GPS sensing of atmospheric water vapor: precise point positioning with orbit, clock, and phase delay corrections[J]. Geophysical Research Letters, 2014, 41(10): 3615-3621. DOI: 10.1002/2013gl058721.
[52]WU Z L, LU C X, HAN X J, et al. Real-time shipborne multi-GNSS atmospheric water vapor retrieval over the South China Sea[J]. GPS Solutions, 2023, 27(4): 179. DOI: 10.1007/s10291-023-01519-0.
[53]PAN L, GUO F. Real-time tropospheric delay retrieval with GPS, GLONASS, Galileo and BDS data[J]. Scientific Reports, 2018, 8(1): 17067. DOI: 10.1038/s41598-018-35155-3.
[54]李宏达, 张显云, 廖留峰, 等. 利用GPS/BDS/GLONASS/Galileo组合PPP反演大气可降水量[J]. 测绘通报, 2020(6): 63-66.
[55]LU C X, LI X X, NILSSON T, et al. Real-time retrieval of precipitable water vapor from GPS and BeiDou observations[J]. Journal of Geodesy, 2015, 89(9): 843-856. DOI: 10.1007/s00190-015-0818-0.
[56]王杰, 何秀凤, 王笑蕾, 等. 小波分析在GNSS-IR潮位反演中的应用[J]. 导航定位学报, 2020, 8(2): 82-89. DOI: 10.16547/j.cnki.10-1096.20200214.
[57]WANG X L, HE X F, ZHANG Q. Coherent superposition of multi-GNSS wavelet analysis periodogram for sea-level retrieval in GNSS multipath reflectometry[J]. Advances in Space Research, 2020, 65(7): 1781-1788. DOI: 10.1016/j.asr.2019.12.023.
[58]陈殊, 何秀凤, 王笑蕾, 等. 基于小波分析的多模多频GNSS-MR潮位反演[J]. 大地测量与地球动力学, 2022, 42(4): 365-370. DOI: 10.14075/j.jgg.2022.04.007.
[59]游高冲, 郭杭, 罗孝文, 等. 基于LS-SVM的多系统融合GNSS-MR潮位反演[J]. 海洋学研究, 2022, 40(1): 72-80. DOI: 10.3969/j.issn.1001-909X.2022.01.008.
[60]苏东林, 陈爱新, 谢树果, 等. 电磁场与电磁波[M]. 北京: 高等教育出版社, 2009: 434-440.
[61]KOMJATHY A, MASLANIK J, ZAVOROTNY V U, et al. Sea ice remote sensing using surfacereflected GPS signals[C]// IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment. Proceedings (Cat. No.00CH37120). Honolulu, HI, USA: IEEE, 2002: 2855-2857. DOI: 10.1109/IGARSS.2000.860270.
[62]WIEHL M, LEGRSY B, DIETRICH R. Potential of reflected GNSS signals for ice sheet remote sensing[J]. Progress In Electromagnetics Research, 2003, 40: 177-205. DOI: 10.2528/pier02102202.
[63]張云, 郭建京, 袁国良, 等. 基于GNSS反射信号的海冰检测的研究[J]. 全球定位系统, 2013, 38(2): 1-6. DOI: 10.13442/j.gnss.2013.02.005.
[64]高洪兴, 杨东凯, 张波, 等. 基于GNSS卫星反射信号的海冰厚度探测[J]. 电子与信息学报, 2017, 39(5): 1096-1100. DOI: 10.11999/JEIT160765.
[65]张国栋, 郭健, 杨东凯, 等. 星载GNSS-R海冰边界探测方法[J]. 武汉大学学报(信息科学版), 2019, 44(5): 668-674. DOI: 10.13203/j.whugis20170050.
猜你喜欢
珠江水运(2017年10期)2017-06-15 23:45:15
中国高新技术企业(2017年8期)2017-06-05 22:45:08
东方法学(2017年3期)2017-05-11 00:28:32
价值工程(2017年12期)2017-05-04 23:28:20
中国市场(2016年51期)2017-04-18 12:22:26
中国科技纵横(2017年3期)2017-03-29 18:20:20
经营者(2017年2期)2017-03-25 08:58:10
建材发展导向(2016年5期)2016-10-19 13:32:07
中国科技博览(2016年7期)2016-04-25 06:57:28
中国科技博览(2016年8期)2016-04-25 06:02:18
