
膜污染的光学监测技术研究进展
2024-04-27 06:24任芝军白莹王秋稳韩金龙刘晓阳
工业水处理 2024年4期
任芝军,白莹,王秋稳,韩金龙,刘晓阳
(1.河北工业大学能源与环境工程学院,天津 300401;2.天津市清洁能源利用与污染物控制重点实验室,天津 300401)
膜技术广泛应用于海水淡化、工业废水回用、饮用水水质提升、垃圾渗滤液处理等领域。我国膜产业总产值预计2025年达到5 000亿元,2035年达到8 000亿~10 000亿元〔1〕。在膜工艺运行过程中,进水中的污染物会沉积在膜表面和(或)膜孔上,致使膜通量下降,这种膜污染现象是膜技术实际应用的固有瓶颈〔2〕。为更好地理解和改善膜污染问题,需要对膜过滤过程进行实时监测。传统的实时监测技术主要从通量、跨膜压差以及滤液水质着手,这些参数只能表示膜污染结果,不能提供污染物的位置、成分、含量等具体信息,且难以达到早期预警的效果〔3〕。对此,研究人员开发了具有原位、无损、快速等优势的多种光学实时监测技术,用于观测膜污染过程中膜片、膜-进料液界面和流体主体的动态变化,并给出污染物的化学组成、空间分布等信息。这些技术的监测结果不仅能用于膜污染的早期预警,还能为膜系统运行参数的调整和清洗操作的优化提供理论指导,延长膜片使用寿命。
近年来发展较快、具有膜污染实时监测潜力或应用的光学技术,包括穿透膜直接观察(Direct observation through the membrane,DOTM)、光学相干断层扫描(Optical coherence tomography,OCT)、激光共聚焦显微成像(Confocal laser scanning microscopy,CLSM)等显微成像技术,三维荧光(Excitation-emission matrix,EEM)和拉曼光谱等分子光谱技术以及粒子图像测速技术(Particle image velocimetry,PIV)。这些技术均可结合具有光学窗口或光学透明度的膜池(在实际工业应用中,可将该模拟池放置在膜系统的旁路中)或者采用光纤探头实现在线监测。笔者阐述了这些光学实时监测技术及其衍生技术的工作原理,并介绍了各技术在膜污染领域的典型应用和最新进展,进一步分析了它们的优势和局限性,讨论了如何克服其在实际应用中的限制,对于深入了解和控制膜污染具有重要意义。
1 光学显微成像技术
1.1 穿透膜直接观察(DOTM)技术
1998年,联合国教科文组织膜科学与技术中心首次开发了DOTM技术。其通过配备有透射和反射光路的光学显微镜和图像记录设备,在微米尺度上,从滤出液侧对横流过滤系统中透明平板膜表面不同位置处附着的颗粒进行连续、原位观察,获得颗粒物的沉积、吸附和扩散情况。H. J. TANUDJAJA等〔4〕利用DOTM技术观测油水乳液过滤过程中膜面污染物的沉积程度,结合ImageJ软件计算膜-进料液界面处的表面覆盖率,并采用通量步进法,确定临界通量。随后,该课题组利用上述方法,确定了油水乳液膜分离过程中,不同进料条件(黏度和双分散性〔5〕、油浓度和盐度〔6〕)和操作条件(错流速度和间隔物〔7〕)下的临界通量,并进一步揭示了不同临界通量所对应的膜污染机制。考虑到部分膜污染物与透明膜之间对比度不够高,H. LI等〔8〕将光学显微镜与荧光光源、滤光片等组件相结合,并通过荧光染色提高污染物与膜的对比度,成功地监测了不同错流速率下染色细菌在膜表面的沉积和去除过程,发现随着错流速率的增加,微生物聚集体形成,临界通量升高且大于理论值。
把观察方向从膜片的下方改为膜片的上方或侧面对膜片进行观察,称为膜面直接可视化技术(Direct visualization on the membrane,DVO),可以对膜面污染层的横截面进行观测,量化污染层厚度。Y.MARSELINA等〔9-10〕将通过DVO得到的管式膜图像投影到带有附加比例的屏幕上,量化滤饼层高度,观察到不同横流速度下滤饼侵蚀和膨胀机制的差异性。A. VALENCIA等〔11〕利用DVO观察膜污染过程中膜横截面的变化情况,并用图像处理程序分析颗粒沉积速度和滤饼层沉积量,发现膜的孔径、孔密度等几何形状参数显著影响了初始沉积层和滤饼层的形成,从而影响跨膜压差。
综上所述,DOTM和DVO不受进料悬浮液的影响,能够非侵入性地分别从膜片下方和上方/侧面在线观察膜片以及膜片-进料液界面区域中所有污染物的附着情况,是研究膜污染的沉积动力学、污染层厚度和压实情况的有力手段。此外,结合图像处理技术,DOTM或DVO还能够确定膜过滤系统的临界通量,辅助优化膜分离过程的操作参数。然而,由于其技术原理的局限性,DOTM和DVO空间分辨率较低,不能捕捉小尺寸污染物(<1 µm)的运动形态,也不能提供污染物的成分信息。此外,DOTM和DVO分别需要透明膜和相对透明的进料溶液,才可采集污染膜图像。
1.2 光学相干断层扫描(OCT)技术
OCT是一种新兴的三维成像技术,能够以微米级别的空间分辨率表征半透明样品的内部结构,已逐步应用于膜污染表征领域。其通过分光器将近红外光源所发射的光分成两部分,一部分进入参考光路,被参考镜反向反射后,沿原路返回,另一部分沿样品光路照射到样品,被折射率不均匀的样品背向散射回来。二者相遇后产生光学干涉图案,经信号处理后获取膜面污染层的二维和三维结构〔图1(a)〕〔12〕。二维横截面图像用于可视化纵向膜面污染层的生长情况,量化污染层厚度。相较于二维图像,三维图像还可以确定污染层的形态、体积、覆盖面积和膜污染指数,目前使用较多。
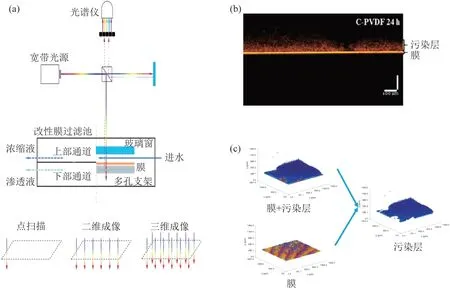
图1 OCT的基本原理(a),膜片横截面的二维扫描图像(b)和污染膜的三维OCT图像(c)Fig.1 Basic principle of OCT (a),cross-section image of the fouled membrane (b) and three-dimensional OCT image of the fouled membrane (c)
S. WEST等〔13〕首次在膜污染模拟器(Membrane fouling simulators,MFS)运行期间,利用OCT观测生物污染层的空间结构,量化采集到的三维OCT图像,得到面积覆盖率,并将其与进料通道压降相关联,探究生物污染层空间结构对进料通道压降的影响。L. FORTUNATO等〔14〕在改进的MFS中模拟螺旋缠绕膜组件,使用OCT采集盖玻片、原水侧间隔材料和膜面上生物污染的三维图像,评估不同位置生物量随时间的变化程度及其与膜通量的关联。A.BAUER等〔15〕在直接接触式膜蒸馏装置上添加光透明窗口,原位采集污染层的三维OCT图像,计算得到污染层体积和覆盖面积,并定义了Rs(污染层体积/扫描区域面积)和Rc(污染层体积/污染层覆盖面积)两个参数来表示局部和全局的污染层空间结构信息。P. W. WONG等〔16〕利用该方法获得了膜蒸馏过程中膜片横截面和表面图像,并利用MATLAB程序将膜片和污染层区分开〔(图1(b)和1(c)〕,以评估两种商业膜的防污性能〔17〕。Wentao SHANG等〔18〕将错流纳滤装置与OCT设备结合,观测牛血清蛋白溶液对4种膜的动态污染过程,解析膜面微观结构对膜污染程度的影响。OCT不仅能够较好地观测低浊度和低有机负荷系统中膜污染现象,对高浊度系统也同样有效。L. FORTUNATO等〔19〕提前关闭曝气限制膜前絮体移动,利用OCT技术成功监测了膜生物反应器中的膜污染过程,发现随着过滤时间的延长,污染层厚度增加,粗糙度降低。
综上所述,OCT适用于各种浊度条件下、毫米范围内膜片和膜-进料液界面三维空间结构的实时监测,可迅速获得沉积动力学、污染层厚度和覆盖面积等信息。但是,传统OCT的空间分辨率较低(5~20 µm),不足以描绘污染层的精细结构,且数据采集过程中,系统中动态的絮凝体会产生运动伪影,影响监测结果的准确性〔20〕。此外,OCT无法确定污染物的成分信息。目前该技术仅限于实验室研究,尚未推广到实际监测中。
1.3 激光共聚焦扫描显微镜(CLSM)技术
自20世纪90年代以来,基于荧光信号的CLSM迅猛发展。它通过待测分子或探针分子的荧光区分不同待测物种,获取数百微米范围内膜面污染物的三维图像。G. BRANS等〔21-22〕首次使用CLSM在线监测具有光透明窗口的膜过滤单元中的膜污染过程,观察荧光染色的聚苯乙烯颗粒沉降情况,研究了颗粒在双分散悬浮液中的剪切诱导扩散行为和不同工艺参数下聚合物在膜中的传递机制。类似地,H. I. BEN等〔23〕利用CLSM结合可用于原位观察的膜过滤单元,在线监测单分散荧光颗粒形成滤饼层的过程,通过颗粒沉积物的三维CLSM图像,计算获得滤饼层中颗粒的排列形态、均匀性、厚度和孔隙率。在此基础上又研究了不同进料液条件(pH、离子强度和浓度)对超滤膜污染的影响和双组分悬浮液过滤过程中滤饼层的形成过程〔图2(a)和2(b)〕〔24-25〕,研究发现,无论实验条件如何,膜-颗粒相互作用对颗粒初始沉积行为影响最大,而颗粒-颗粒相互作用主要影响滤饼层的生长。E. W. TOW等〔26〕使用CLSM和定制的膜过滤流通池,对生物污染的形成和去除过程进行原位监测,观测到胞外聚合物的产生、起皱、分层和成膜现象,发现生物污染物的去除过程主要包括生物膜的分层和撕裂,凸显了原位成像对生物污染物结构实时监测的准确性。

图2 膜面污染层的三维CLSM图像(a),由CLSM图像计算得到的膜面污染物的面积覆盖率随样品深度的变化情况(b)和污染膜LSFM成像示意(c)Fig.2 CLSM image of fouled membrane (a), vertical changes of area coverages of foulants calculated by CLSM images (b),and schematic diagram of LSFM imaging of fouled membranes (c)
将CLSM的光路进行改造,使用一定厚度的光片进行两条正交光路的照明和检测,实现对较大样品的快速成像,称为光片荧光显微镜(Light sheet fluorescence microscopy,LSFM)。相较于CLSM,LSFM具有更高的时间分辨率,是一种成本效益高且相对快速的成像手段〔27〕。Lingling CHEN等〔28〕首次建立了基于LSFM的膜污染大规模三维成像平台〔图2(c)〕,成功观测到静态吸附过程中葡聚糖在膜上的三维分布;在此基础上又开发了具有不同荧光分子分辨能力的多色光片荧光显微镜(Multi-color light sheet fluorescence microscopy,MC-LSFM),观测膜污染过程中葡聚糖、牛血清蛋白及其混合物的空间分布情况,结合ImageJ对图像进行了半定量分析,发现相较于葡聚糖,牛血清蛋白污染是渗透通量下降的主要原因〔29〕。
CLSM可迅速获取膜片-进料液界面中目标污染物分布,提供定性和定量信息,且由于荧光探针的作用,即使在低浓度下也可以观察目标污染物,实现高灵敏度测试。在CLSM基础上发展出的LSFM又可以实现对较大样品的快速成像,具有更高的时间分辨率,有助于对膜污染机理的深入探索。然而,由于CLSM和LSFM测试需要荧光标记,因此只适用于部分具有自发荧光或荧光探针的污染物,且荧光染料一般为有机大分子,在污染层中的穿透性较差,有可能会吸附在膜表面,干扰膜污染测试〔30〕。目前,该技术仍处于实验室探究阶段,尚未应用于实际监测过程中。
2 分子光谱技术
2.1 三维荧光光谱(EEM)技术
EEM是描述荧光强度随激发和发射波长变化的图谱,其谱峰位置和强度与蛋白质、腐殖质等荧光物质的化学结构和浓度有关,近年来被广泛应用于膜污染的定性和定量分析。
根据样品形态的差异,EEM可分为液相EEM和固相EEM。其中,液相EEM一般是对膜过滤前后的溶液进行测试,通过谱峰位置识别污染物组成,结合荧光指数、荧光区域积分和平行因子分析等对污染物进行定量〔31〕。根据入射角大小,液相EEM可分为直角荧光光谱(Right-angle excitation-emission matrix,RA-EEM)和正面荧光光谱(Front-face excitation-emission matrix,FF-EEM)。RA-EEM仅能表征稀释和透明样品,而FF-EEM对于混浊或不透明的样品同样适用,无需对样品进行预处理,非常适用于膜污染的实时、无损监测。Huarong YU等〔32〕利用FF-EEM表征二级出水中的溶解性有机物,对超滤装置中的膜污染现象进行早期预警,证实了FFEEM作为膜污染在线监测技术的可能性。固相EEM是使用与样品呈不同角度的激发光照射样品表面,捕获从膜面发出的荧光,识别膜面上的蛋白质、腐殖质等有机物,已成功用于膜污染原位监测。H.YAMAMURA等〔33〕通过光纤将膜面荧光信号输送至荧光分光光度计,进行膜面固相EEM信号的实时采集,对比膜面和天然有机物的荧光特性后,发现疏水蛋白质是导致不可逆污染的主要物质。Qing DING等〔34〕利用类似的方法对膜清洗过程进行固相EEM原位在线监测,发现亲水蛋白质是酸、碱、次氯酸钠等一系列化学清洗后的残留污染物。
EEM能够迅速监测膜面以及流体内的荧光有机物,并进行定性、定量分析,具有非破坏性和高度选择性。然而,众多膜污染物中,仅有小部分芳香类物质具有荧光特性,其代表性有待商榷〔35〕。因此,EEM难以对复杂进水条件下的膜污染行为进行全面监测。
2.2 拉曼光谱
拉曼光谱是一种基于非弹性散射的光谱技术。具体来讲,当入射激光打到样品上时,样品分子会使部分光子发生非弹性散射,非弹性散射光和入射光之间的频率差即为拉曼位移。拉曼光谱峰的位置和强度与样品分子中化学官能团的种类和浓度有关。
近年来,拉曼光谱因其对水不敏感、无创和指纹识别等独特优势,逐渐应用于无机和有机污染物膜污染过程的在线监测。T. VIRTANEN等〔36〕结合普通拉曼光谱和错流过滤池观察模型污染物香兰素在膜面的吸附过程,证实了普通拉曼光谱在膜污染实时监测方面的应用潜力。O. D. SUPEKAR等〔37-38〕结合拉曼显微镜和定制的反渗透膜流通池对硫酸钙的早期污染和清洗过程进行实时原位监测,得到了无机垢形成和去除的化学和空间信息。在此基础上,又利用该设备原位观测了单一和混合无机污染物(硫酸钙和碳酸钙)的膜污染行为,发现在混合污染情况下,仅监测到硫酸钙的信号,这与污染物的非均匀分布和单点光谱扫描的采样方式有关。若进行大范围拉曼显微成像,硫酸钙和碳酸钙的空间分布均可获得〔39〕。Juan TANG等〔40〕结合拉曼光谱和电化学阻抗谱原位在线监测混凝-超滤系统中带有不同电荷的助凝剂和污染物所造成的膜污染现象,其中电化学阻抗谱监测膜-进料液界面层、膜面和界面溶液层的电阻,拉曼光谱提供膜上物质的浓度信息,结果发现,助凝剂会影响膜污染形成的各个阶段,且在膜孔较小时,助凝剂侧链基团所带电荷对膜污染影响较大。
由于样品分子拉曼散射弱,仅为入射光强度的10-9~10-6,普通拉曼光谱的信号较差。表面增强拉曼光谱(Surface-enhanced Raman spectroscopy,SERS)借助金、银等金属基底的局域表面等离激元共振效应,能大幅度增加膜面污染物的拉曼散射强度(104~106倍),削弱膜面拉曼信号的干扰,在膜污染实时监测领域具有较大应用潜力。M. KÖGLER等〔41〕将金纳米颗粒通过过滤方法沉积在膜表面,作为SERS感应区,将其置于错流膜过滤系统中进行实验,将便携式拉曼光谱仪和商用探头相结合,实时监测腺嘌呤在膜表面的污染形成过程,取得了良好的测试效果(图3)。类似地,E. DUMONT等〔42〕开发了一种制备简单的固体SERS基底,与非侵入性分析装置相结合,对生物样品实现了近乎实时的监测,并可获得样品精确的空间分布信息。

图3 SERS在线监测装置示意(a)和不同浓度腺嘌呤7天内所导致的膜污染SERS光谱(b)Fig.3 Schematic diagram of the SERS online monitoring system(a) and SERS spectra of the membrane fouled by different concentrations of adenine in 7 days(b)
作为一种无创的可定性和定量的光谱技术,拉曼光谱在膜污染实时监测领域具有巨大的应用潜力。然而,由于拉曼光谱的量子效率低、灵敏度低,膜本身的拉曼信号和复杂污染物的荧光信号可能会干扰膜面污染物拉曼信号的采集和解析〔30〕。相较于普通拉曼光谱,SERS极大地提高了检测灵敏度,但其性能依赖于SERS基底的浓度、与膜面和待测污染物的亲和性以及待测污染物的空间分布,并且SERS基底的加入可能会影响膜污染的具体情况。
3 粒子图像测速(PIV)技术
自1984年首次提出,PIV技术已被广泛应用于工程领域流体流动研究。在流场中布撒示踪粒子后,PIV将脉冲激光片光源入射到所测流场区域,利用激光干涉原理和连续曝光技术将粒子图像记录在底片或CCD相机上,逐点处理图像,获得流场速度分布〔43〕。在测试过程中,示踪粒子应当具有较好的流动跟随性、微米量级的直径、与流体密度相当的密度。常用的示踪粒子有聚苯乙烯、铝、二氧化钛、玻璃球等。
PIV技术目前已用于研究膜过滤单元内的流体流动以及其对膜污染过程的影响。A. P. S. YEO等〔44-45〕利用PIV观测气泡所导致的剪切应力的时空变化情况,探究曝气对中空纤维膜污染的影响,发现在相同的曝气流量下,大数量的小气泡比小数量的大气泡能够更有效地控制膜污染。Tian LI等〔46〕利用PIV技术获取膜过滤系统内的二维速度分布,探究振动和曝气等手段控制膜污染的机理,发现振动频率比振幅能够更有效地控制膜污染。此外,PIV常常与计算流体动力学(Computational fluid dynamics,CFD)模型或者其他技术联用,研究膜系统的水动力学情况,优化膜系统构型。例如,Xuefei LIU等〔47〕为研究混凝剂对膜生物反应器中污泥流变学和膜过滤区域流体动力学的影响,开发了一种多相CFD模型,并通过PIV技术所确定的气泡流中液体流速来进行验证;同样利用该方法探究了8个设计变量(膜纤维取向、过滤槽几何形状等)对膜面剪切力的影响,以优化膜过滤单元的结构〔48〕。在此基础上,Xiaomin XIE等〔49〕提出了一种在受限旋转叶轮过滤器中测量局部速度的PIV装置,结合CFD模型分析不同工况下动态过滤模块的瞬时和平均速度场、剪切应力场和速度系数等局部水动力学特性。除此之外,C. REY等〔50-51〕利用PIV技术和原位小角X射线散射技术,分别获得浓度极化层的速度场和污染物的浓度分布,观察到了悬浮液的流变行为和粒子间吸引力在污染层的时空演化。
PIV可以迅速监测膜-进料液界面和系统内流体主体的局部速度变化,目前已成功用于长时间实时监测商业规模中空纤维膜组件的膜污染行为,但该技术的应用需有示踪粒子的配合,且不能了解到污染物的成分信息和空间分布。
4 膜污染光学监测技术的优缺点和适用范围
这些光学监测技术都具有原位、快速等特点,当与光学窗口或者光纤探头等相结合时,能够在线监测膜污染的形成过程。例如,DOTM、OCT、CLSM和拉曼光谱可以和具有光学窗口或者光学透明度的膜池相结合,获取膜面污染物的空间结构信息;PIV通过和透明测试池结合以实现局部流体流动特性的在线监测;EEM和拉曼光谱还可以通过光纤探头在线收集膜面污染物的分子信息。此外,由于检测原理和仪器结构的差异性,每种技术的适用范围各不相同,优缺点各异。笔者总结了各技术的监测区域、空间分辨率、探测深度等指标(图4)〔52-54〕,所监测的膜污染类型和膜片类型〔15,26,30,55-56〕,能否提供污染物化学组成、空间结构等信息(表1)〔30,55-56〕,以及各技术的优缺点(表2)。研究人员可根据上述信息和实际需求选择合适的技术。例如,需要识别膜面关键污染物组成并获取其空间分布信息时,可以选择CLSM或者拉曼光谱。其中,CLSM信号较好,但是主要针对蛋白质、多糖等有机污染物和微生物细胞,且需要事先知道污染物的大致组成以选择合适的荧光标记物;拉曼光谱信号较差,但是能够在无需标记的情况下,同时获取无机、有机和微生物污染物的化学信息,通过光谱“指纹”识别污染物的化学组成。需要观测广谱污染物的动态沉积过程时,在溶液相对透明且污染物尺寸较大(≥1 µm)时可选用DOTM,否则OCT技术更为适用。想要获取流体流动特性,探究曝气、流体流速、装置构型等运行条件对膜过滤性能影响时,需要选用PIV技术。
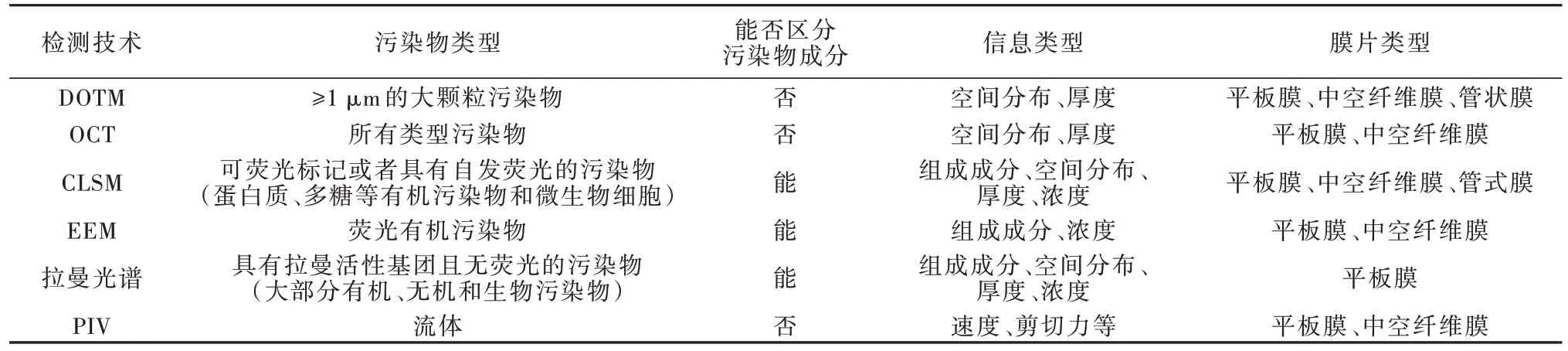
表1 应用于膜污染实时监测的光学表征技术Table 1 Optical characterization techniques applied to real-time monitoring of membrane fouling

表2 膜污染光学监测技术的优缺点Table 2 Advantages and disadvantages of optical monitoring technologies for membrane fouling

图4 光学表征技术的监测区域(a)和光学成像技术的穿透深度和空间分辨率(b)Fig.4 Fouling regions monitored by various optical technologies (a) and penetration depths and spatial resolutions of the optical imaging technologies (b)
5 总结与展望
光学监测技术具备原位、快速、无损等优势,能够对膜污染过程进行实时在线监测,获取膜过滤单元中的流体流动状态、污染层的空间结构、化学组成等信息,这对于膜污染的早期预警和膜污染控制方法的优化具有重要意义。
这些光学在线监测技术目前大都处于实验室探索阶段,在实际工程中应用较少,这可能是由于以下几点原因造成的:1)这些技术的使用往往需要与定制的流通池(配备光透明窗口)结合,不具备普适性;2)实际膜法水处理体系,特别是废水处理过程中,污染物的化学组成复杂多样,这不仅导致部分污染物信息采集不全面,也为光谱信号的解释增加了难度;3)部分仪器设备占地面积大,价格昂贵,操作复杂或者尚未进行商业化生产。在未来,可以从仪器设备的改进或者多种方法的联用技术等方面入手,改善目前光学监测技术的不足:1)将带有光透明窗口的模拟测试池接入膜过滤单元的旁路流道中,或者将光纤探头和在线监测仪器结合,以增加光学实时监测技术的普适性;2)基于半导体技术,开发芯片级光谱传感器等在线监测设备,降低设备成本,提高设备小型化程度;3)将光学、声学、CFD等多种技术相结合,整合各自的优势,提供更准确、更全面的信息。通过上述方法有望将光学监测技术由实验室探索阶段扩展到工业应用过程,改善膜污染问题,促进膜法水处理技术的发展。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
科学家(2022年3期)2022-04-11
云南化工(2021年6期)2021-12-21
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
森林工程(2018年3期)2018-06-26
橡塑技术与装备(2016年14期)2016-02-24
航天返回与遥感(2014年1期)2014-07-31
自动化博览(2014年12期)2014-02-28
郑州大学学报(理学版)(2013年3期)2013-03-11
化学分析计量(2013年1期)2013-03-11
