
一种无刷直流电机驱动器的设计与实现
2024-04-27 06:54:36马昭
自动化与仪表 2024年4期
马 昭
(西安航空学院,电子工程学院,西安 710077)
有刷直流电机没有电子元件进行换相,在换相时零器件间有摩擦,产生电气接触火花、无线电信号干扰和使用寿命缩短等问题,在高温环境和恶劣环境中可能只能工作几分钟而已,这些问题就使有刷直流电机稳定性变得很差,一旦损坏几乎不能维修和制作的成本大大提高,因此很难在一些复杂领域应用及发展。而无刷直流电机采用了电力电子器件进行换相,和有刷电机的机械换相有很大区别,逆变器和转子位置检测器构成了换向器。无刷直流电机的优点更多,这些优点包括电机的体积更小、不用频繁地进行维修和检测、稳定性更高、没有电气接触火花、可工作于不良环境中、优良的转矩特性,不会再出现有刷直流电机机械换相带来的不好的问题。无刷直流电机因其良好的机械电气特性,在工业领域得到了广泛的应用[1]。
1 无刷直流电机控制系统的拓扑结构
本设计无刷直流电机控制系统的拓扑结构如图1 所示[2],主要由控制和功率部分组成。控制部分主要包括单片机控制核心、按键电路和LCD1602 显示电路,控制部分是驱动器的核心单元,主要完成电机位置检测、串口通信、LCD1602 液晶驱动显示、按键检测及PWM 控制信号的产生。功率部分是实现电机控制的能量来源,主要由直流电源输入、三相逆变电路、稳压电路、驱动电路及保护电路构成。直流电源是驱动器的直流输入部分;三相逆变电路实现将直流电逆变成三相交流电控制电机运转,采用六步换相法对电机进行控制;稳压电路将输入直流电压降压提供给驱动芯片和控制电路供电;驱动电路将单片机产生的PWM 信号放大后驱动驱动电路的开关管;LCD1602 显示电机的运行参数;保护电路通过检测电机的电流,防止电机堵转或者过载等情况异常时造成电机和驱动器损坏。
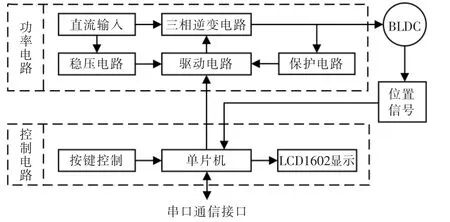
图1 无刷直流电机驱动器拓扑结构Fig.1 Brushless DC motor driver topology
2 无刷直流电机闭环控制策略
无刷直流电机功率电路高频开关过程会产生高频干扰,微分环节会加剧对系统影响,因此采用PI 调节器实现对无刷电机的速度闭环控制,其控制结构框图如图2 所示。

图2 无刷直流电机闭环控制结构Fig.2 Structure diagram of brushless DC motor closed-loop control
控制器接收上位机发送的速度给定指令,该速度值和HALL 传感器计算转速做差得到误差信号,经PI 运算后得到PWM 占空比,经过功率电路控制电机,从而实现对电机转速闭环控制。
无刷直流电机在启动、停止或者输入较大突变时,易产生较大偏差,积分环节可能短时间积累较多误差,引起电机转速出现较大超调,严重会出现电机失控,本设计采用积分分离方法改善电机稳定性[3]。积分分离控制算法为
式中:u(k)为PI 调节器的输出;kp为比例系数;error(k)为速度给定和反馈误差;β 为积分项开关系统;T 为采样周期。
当|error(k)|>ε 时,采用P 比例控制,避免产生较大超调;
当|error(k)|≤ε 时,采用PI 比例积分控制,可保证具有较高的转速控制精度[4]。
3 硬件电路设计
3.1 功率主电路和电流检测电路
无刷直流电机驱动器的功率主电路如图3 所示。图中由6 个N 沟道MOSFET 构成的三相全桥逆变电路,通过按照一定规律控制6 个开关管栅源极间电压控制开关管的导通与关断,可以实现将直流电压逆变成三相交流电,从而实现电机的运动控制。控制开关管的占空比,实现输出电压控制,从而调节电机转速。
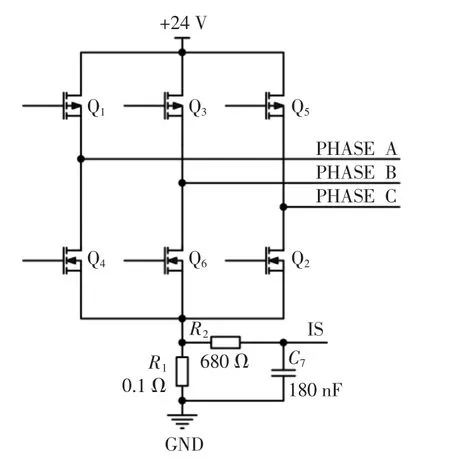
图3 无刷直流电机驱动器主电路Fig.3 Main circuit of brushless DC motor driver
由于电机电流一定会流经上管和下管功率开关管,因此电机绕组的电流检测通过在下管对地之间串接低阻值具有一定功率的检测电阻实现,电流流经电阻时,电阻两端会产生电压降,该电压经过图中R2和C7构成的一阶低通滤波器后IS 信号提供给电流保护单元,实现对电机的过流保护,该方法简单有效。本设计采用串联0.1 Ω/2 W 的功率电阻实现对电机的电流检测。
3.2 驱动电路
单片机产生的PWM 控制信号功率较小,不足以驱动MOSFET 导通和关断,采用集成半桥驱动芯片IR2104,该芯片可以同时完成一对上下桥臂的驱动控制。本设计采用3 片IR2104 芯片驱动三相全桥上的功率MOS 管。其驱动电路原理图如图4所示。

图4 无刷直流电机驱动器驱动电路Fig.4 Brushless DC motor driver circuit
图中C4是自举电容,D1是给自举电容充电的快速二极管。D1使用快恢复二极管1N4148,当下管Q4导通时,+12 V 电压通过二极管D1、电容C4及Q4构成的回路给电容C4充电,提供给上管驱动的电压。当下管关断时,C4电压提供给上管导通的驱动电压,电容C4放电[5]。通过R19和R31为MOSFET栅极与IR2104 的输出之间的驱动电阻,该电阻阻值可以调整开关管开通和关断速度,本设计选择10 Ω 驱动电阻。R27和R35为MOSFET的泄放电阻,防止静电击穿和MOSFET 误导通。此设计使用的MOSFET 为AOD2610,60 V/46 A,导通电阻10.7 mΩ,具有较低的导通电阻,可以降低驱动器的导通损耗。
3.3 控制电路
驱动器的主控制采用STC89C52RC 单片机,具有丰富的外设、高速性能、低功耗和较高的抗干扰和抗静电能力,能够满足驱动器的设计要求。
4 系统软件设计
4.1 HALL 转速获取程序
PWM 捕获中断是用来检测霍尔信号变化及转速、方向等信息的更新。当霍尔引脚接口输入电平发生变化时产生霍尔中断。在霍尔中断服务函数中,首先读取霍尔信号的电平,获取当前转子所在扇区,然后通过与上次霍尔中断的霍尔编码即转子位置进行比较,判断无刷电机转子的转动方向,再通过计算捕获寄存器的值来计算电机转子转速,PWM 捕获中断流程如图5 所示。

图5 PWM 捕获中断流程Fig.5 PWM capture interrupt flow chart
4.2 定时器控制PI 中断程序
主程序中定义全局变量T_cnt,1 ms 定时器中断加一,通过对这个变量进行判断,以调用不同的控制子函数,使转速的控制周期为0.1 ms。无刷电机速度环通过速度环PI 计算进一步获得PWM 占空比驱动信号。无刷直流电机转速控制流程图如图6所示。
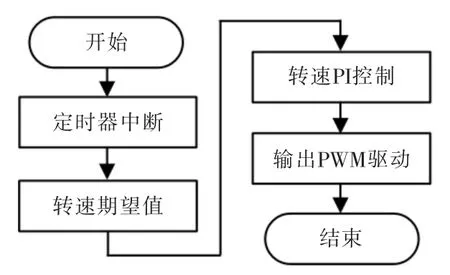
图6 定时器控制PI 中断流程Fig.6 Timer controlling PI interrupt flow chart
4.3 串口中断程序
驱动器支持串口指令控制方式,串口接口用来接收串口指令,实现对电机的正转、反转、停止、转速设定等功能,通过判断数据帧的帧头和帧尾,数据和校验,然后更新相关的控制指令,其流程如图7所示。

图7 串口中断流程Fig.7 Serial interrupt flow chart
5 试验分析
为验证设计结果正确性,制作试验电路板焊接元器件,搭建硬件试验平台,主要包括直流电源、无刷电机驱动板和测试电机,实物样机如图8 所示。
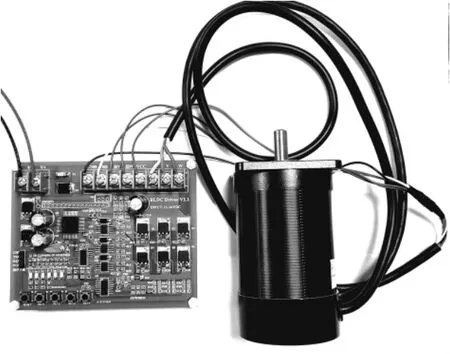
图8 实验样机平台Fig.8 Experimental prototype platform
无刷直流电机驱动器输入直流电压28 V,通过上位机串口发送串口数据指令,启动电机,设定转速为3000 r/min,用示波器测量驱动器的输出三相电压波形,如图9 所示。

图9 驱动器输出电压波形Fig.9 Driver output voltage waveform
由图9 可以看出,三相输出电压波形相位依次相差120°,波形一致,周期为10 ms,各相电压幅值为28 V,电压波形良好。
6 结语
本文介绍了无刷直流电机驱动器的结构及控制策略,设计了无刷直流电机驱动器的硬件电路,并对软件工作流程进行了详细介绍,最终进行PCB制板焊接并搭建了无刷直流电机驱动器实物,通过对测试电机进行功能测试和闭环测试,得到了试验波形,通过试验波形分析,该设计能够实现无刷直流电机驱动器控制,达到了设计要求。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
莆田学院学报(2021年5期)2021-11-13 06:36:38
电脑爱好者(2020年6期)2020-05-26 09:27:33
甘肃科技(2020年20期)2020-04-13 00:30:22
电子制作(2017年1期)2017-05-17 03:54:12
光学精密工程(2016年5期)2016-11-07 09:06:04
电测与仪表(2016年1期)2016-04-12 00:35:12
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
上海电机学院学报(2015年3期)2015-02-28 14:29:52
