面向无人机海上侦察任务的自适应粒度分解策略研究*
2024-04-27 12:12:25陈行军王梓蒙王义涛聂俊峰
火力与指挥控制 2024年1期
陈行军,王梓蒙,2,王义涛,聂俊峰
(1.海军大连舰艇学院作战软件与仿真研究所,辽宁 大连 116018;2.海军大连舰艇学院研究生队,辽宁 大连 116018)
0 引言
战术侦察任务是贯穿海上编队准备与实施作战全过程的关键作战保障任务之一[1],可为海上编队作战任务的顺利实施提供战场情报。依托无人机携带的多元化和可替代特征,具有自主性、灵活性和协同性等优势特点,无人机海上侦察成为未来智能化战争执行战术侦察任务的主要方式。
无人机海上侦察任务类型繁多、任务间关联关系复杂,往往需要协调多种力量,其任务分解的效率和可用性显得尤为重要。国内外诸多学者对任务分解方法开展了较为广泛的研究。耿松涛等针对联合作战电子对抗作战问题,在扩展层次任务网络(hierarchical task network,HTN)规划框架下构建了规范化电子对抗任务描述,并设计了启发式前向搜索算法解决该任务模型[2]。赵佳然等面向反应式与预测式任务分解方法存在的灵活性较差问题,提出一种混合策略的任务分解改进方法,运用TAEMS分析优化了任务分解结果[3]。段志飞等提出一种针对应急行动中应急资源异常处理方法,解决了任务分解过程中资源异常的问题[4]。赵莉等提出一种基于多Agent 技术的云计算任务分解方法,解决了当前云计算任务分解次数多、分解时间和执行时间长的问题[5]。董亚卓等提出一种基于体系结构建模的通用作战任务分解方法和战役战术任务度量指标描述方法,为典型战役战术任务分解和效能分析提供了理论基础[6]。刘乾等针对复杂作战任务分解中存在的随意性、不确定性问题,提出了一种任务分解EVA方法[7]。Padia等面向多时间线、非线性叙事结构,构建了分层任务网络以实现故事的可视化和有效分解[8]。常青等提出基于“时间维、逻辑维、活动维”的作战任务分解策略,并从时序、逻辑和功能3个方面对元任务之间的关系进行了规范化描述[9]。赵紫京郧等针对任务分解完成后任务粒度的评价问题,提出一种基于AHP-RS的任务粒度评价方法,计算了各相对性指标的主观及客观权重,完善了评价体系[10]。已有的研究成果在一定程度上优化改进了传统的任务分解方法,但仍不能完全满足任务的定量分解要求,存在对子任务间约束关系、定量关系要素、定量方法等方面研究不够深入,粒度容易固化,分解任务可操作性差等突出问题。
为有效提高复杂无人机海上侦察任务的分解,分析了海上编队战术侦察任务的基本结构,构建了无人机海上侦察任务模型。在此基础上,构建了军事领域知识图谱,提出了一种基于自适应粒度的作战任务分解方法。
1 无人机海上侦察任务建模
1.1 层次任务网络
常见的任务流程建模方法有图论法、设计结构矩阵(DSM)法和分层任务网络(HTN)法等。其中,HTN 法是基于分层抽象和领域知识的智能规划求解方法,适用于大型复杂任务的分层分解。HTN 法核心思想是设计并构建任务网络TN,建立子任务之间的相互关系,用于满足作战任务分解相关需求,如图1所示。
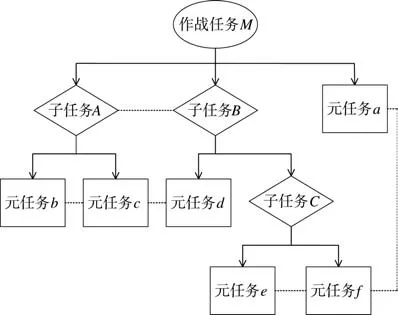
图1 HTN结构图Fig.1 HTN structure diagram
任务网络由任务和任务之间的约束条件组成,整个结构采用自上而下的树状结构。根是总体作战任务,即上级下达的作战命令,可能包含多个复杂任务,也可能是复杂任务和原子任务的组合。叶子节点是元任务,即可直接分配给编队执行的无人机海上侦察任务。例如,将海上编队战术侦察任务这一复杂任务M逐层分解,得到子任务A,B和元任务a。再将子任务B分解得到元任务d和简单子任务C。子任务C进一步分解,将其变为无人机可直接执行的元任务e、f。所有子任务分解为元任务后,即可得到整个分解过程的任务网络。连接根节点和叶子节点的中间节点是一个子任务,子任务是尚未分解和完成的任务。其部分属性与初始任务一致,为复杂任务。任务按结构和粒度也可分为3类:复杂任务、子任务和元任务[11-12]。
1.2 作战任务
在任务分解的过程中,还需考虑元任务之间的约束关系。设任务网络TN={T,S},T为任务集合,则T={T1,T2,T3,...,Tn};S为任务间关系集合。
集合T中的战斗任务Tk(k=1,…,n)被定义为一个六元组:
式中,name代表作战任务名称;function代表完成作战任务所需的性能指标集合,表示为function={a1,a2,…,ai},a1,a2,…,ai为每个战斗性能指标;aim代表作战任务的目标集合;aim={ob1,ob2,ob3,…,obi},obj表示集合中的某个任务目标,令obj={designation,location},其中,designation为目标名称,location为目标位置;starttime为上级要求的任务起始时间;deadline为上级要求执行任务的最后期限;benefit表示任务所能获得的收益。
1.3 作战任务关系
S是任务之间复杂关系的集合,这种关系可反映任务之间的协作,也可制约任务的分解过程。任务之间的关系可分为以下几类[13-15],如表1所示。
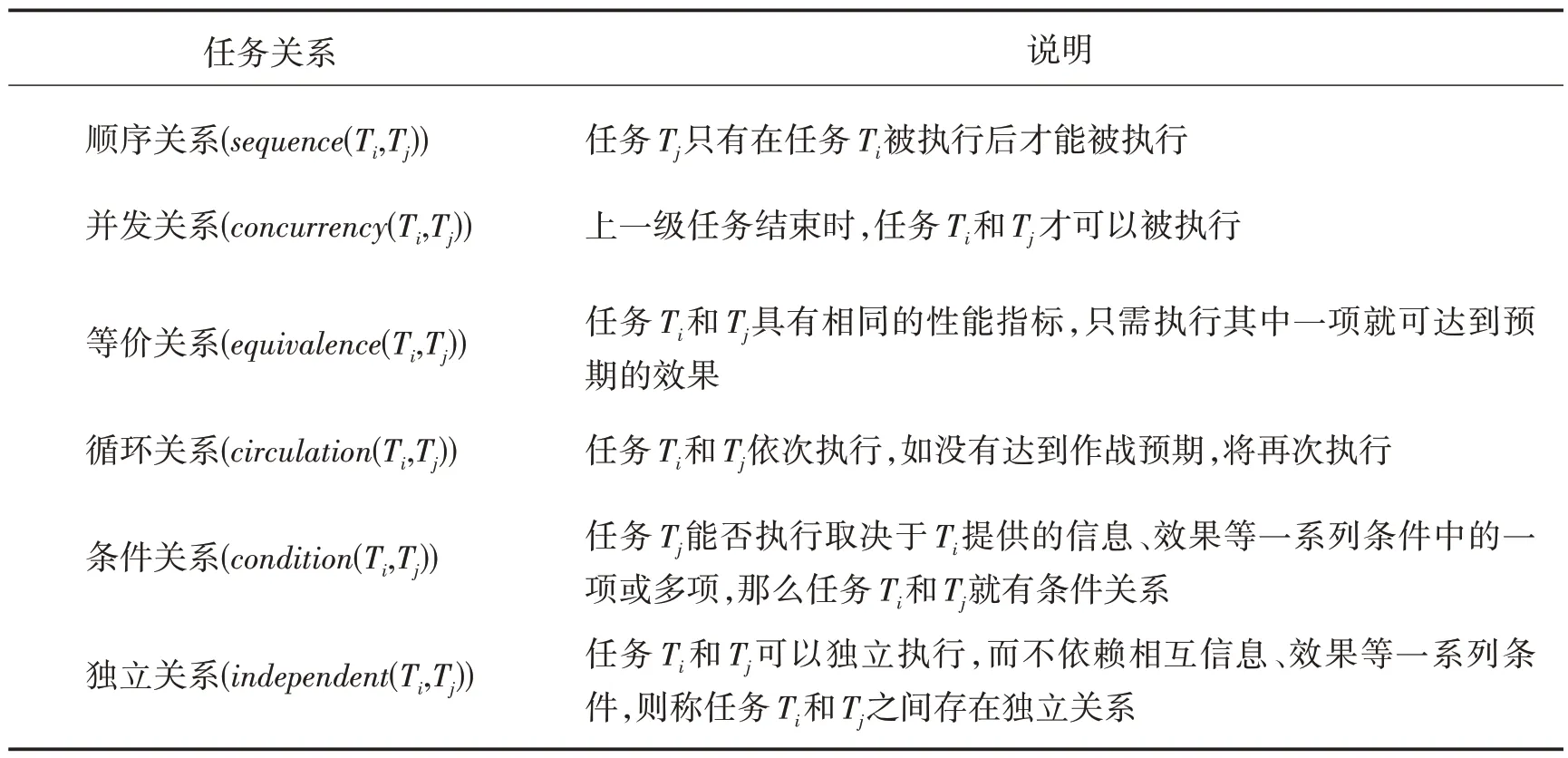
表1 作战任务关系描述Table1 Description of operational mission relationships
2 基于知识图谱的领域知识库构建
2.1 知识图谱简述
知识图谱是一种以三元组为单位的数据存储结构,能有效描述实体间关系以及实体属性信息,可将各种信息和数据整合为知识。
知识图谱是结构化的语义知识库[16],用符号形式来描述真实世界中的物体概念及相互关系。基本组成单位为“实体-关系-实体”三元组,以及实体及属性值的三元组,不同实体间通过关系相互链接,构成网状结构。如图2所示。

图2 知识图谱基本结构示意图Fig.2 Schematic diagram of the basic structure of the knowledge graph
2.2 领域知识库描述
领域知识库是知识图谱的一个分支,相较于知识图谱,领域知识库的知识覆盖范围和使用方式都聚焦于某一特定领域,因此,其对领域知识的深度和精度都有很高的要求[17]。领域知识库可被视为一个具有多个根节点的巨大任务网络,可利用领域知识图谱构建军事领域知识库,分析并处理作战命令非结构化文本数据,直接找出作战任务和武器装备之间的对应关系。
领域知识库中的任务描述与作战任务分析的初始任务描述一致,两者都是六元组形式,但不同在于领域知识库中的任务六元组缺少相关元素,使得{aim,starttime,deadline}的值是空的,而{name,function,benefit}不随具体作战任务的变化而变化,可根据专家经验提前设定。
领域知识库构建流程如下页图3 所示,图中A、B、C为初始任务,3个初始任务中的名称元素可被提取,并与存储在领域知识库中的预设元素a、b、c进行比较。若经比对发现属性一致,则初始任务A、B、C可直接被领域知识库中的相应任务a、b、c所取代,并根据初始任务中的相关属性{aim,starttime,deadline}为其赋值,同时继承领域知识库中3 个任务的关系结构。最后,输出以该任务为根节点存储在领域知识库中的任务网络,并更新初始任务网络TN0。
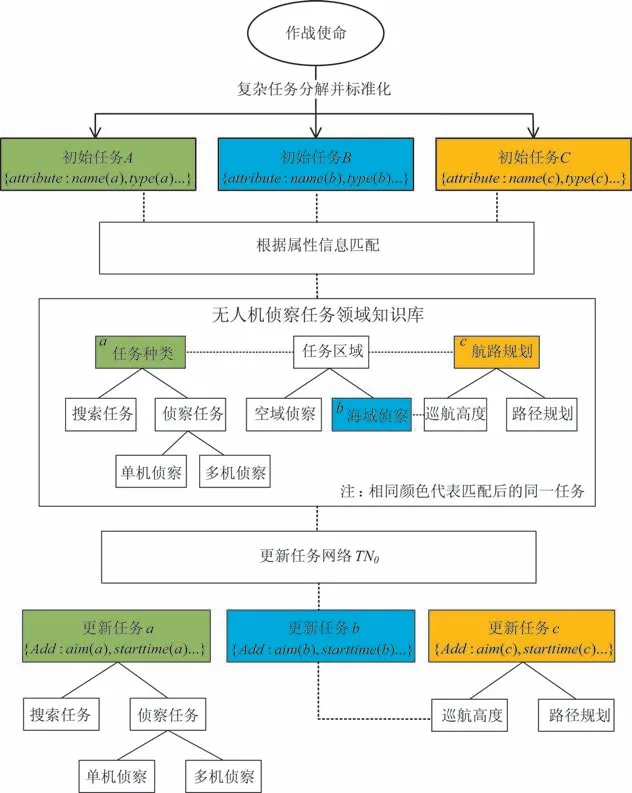
图3 领域知识库构建流程图Fig.3 Flowchart of domain knowledge base construction
3 自适应粒度任务分解策略
无人机执行海上侦察任务过程中,任务分解所需粒度一般会随作战目的、作战环境、作战资源等任务条件的变化而改变[18]。作战任务分解的粒度直接影响作战任务执行效能:任务分解粒度过小、层级过深,任务间的关联关系复杂,势必会增加任务管理难度;任务分解粒度过大,会导致任务内部复杂度高,影响作战任务执行效率。
因此,本文提出了自适应粒度(即“最适合当前作战环境的粒度”)的概念,旨在通过预先建立前提条件并用其进行剪枝,提高作战任务分解的效率。
3.1 子任务粒度分析
将某子任务表示为一个二元组(An,On)的任务结构形式,An表示该子任务的元任务集,即该子任务所包含的元任务数量及种类,On表示该子任务的元任务关系集,即所有元任务的输入、输出关系。
任务粒度量化表示为:
式中,Rt为子任务t的粒度量化指标;Ln为子任务总层级数为子任务中包含的元任务数目。
3.2 子任务关联度分析
On(Pni,Qni)表示某子任务的元任务分解关系集。其中,Pni为该元任务关系集的第i个输出元任务,即与该元任务存在输出关系的所有元素集合,Qni为第i个输入元任务集,即与该元任务存在输入关系的所有元素集合。子任务关联度量化表示为:
式中,En为子任务t的关联度量化指标;(Pni∪Qni)表示某一元任务关系集中的所有输入与输出元任务之间存在并集的元素数量;表示元任务关系集的两两组合总数,即上述交集全集的大小。
子任务关联度表达了子任务中元任务之间的关联程度,关联度越大说明子任务中的元任务关联性越强。
3.3 自适应粒度任务分解步骤
自适应粒度作战任务分解步骤如下页图4所示。
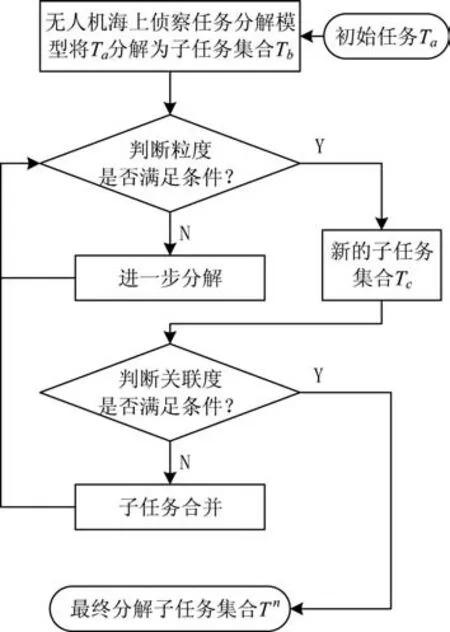
图4 自适应粒度作战任务分解方法Fig.4 Adaptive granularity combat mission decomposition method
1)构建初始作战任务Ta的初始模型,对初始复杂任务Ta进行形式化描述;
2)基于无人机海上侦察任务分解模型,结合作战环境等要素对初始作战任务Ta进行初步分解,得到一个子任务集Tb;
3)根据式(1),计算子任务集Tb的粒度值大小,若满足任务粒度阈值的条件,则进入步骤4)关联度的分析与判断;反之,将重复步骤1)、步骤2)继续分解,此时的子任务集记为Tc;
4)根据式(2),计算子任务集Tc的任务关联度,若满足关联度阈值的条件,则得到最终的子任务集T n;反之,将子任务集Tc中的子任务重新组合,并回到步骤3 对合并后的子任务集进行任务粒度分析,直到任务粒度和关联度均满足阈值条件为止,得到新的子任务集Td。
4 无人机海上侦察任务分解流程
基于自适应粒度的无人机海上侦察任务分解流程如图5所示。

图5 无人机海上侦察任务分解流程Fig.5 UAV marine reconnaissance mission decomposition process
无人机海上侦察任务分解流程可描述为:基于HTN 对无人机海上侦察任务进行分解网络建模;采用知识图谱对军事领域知识库进行构建;基于上述无人机海上侦察任务分解模型,得到一个新的子任务集;对子任务粒度进行分析与判断;对子任务关联度进行分析与判断;采用自适应粒度分解方法对无人机海上侦察任务进一步分解。
5 实例仿真
5.1 作战想定
基本想定为:某海上编队在执行远海域护航任务期间,A区域出现可疑目标。
接到上级命令如下:命令你部完成A区域侦察任务,为我编队提供实时准确和详尽情报信息,尽快查明并分析其意图,立即做好出动准备,派无人机1 架,于T时前集合完毕,并于T+20 min 前向编队指挥所报告决心。
5.2 任务分解
依据无人机海上侦察任务分解流程,可得到:
1)初始任务网络Wo= (Uo,Co):初始任务节点集Uo={uo},uo为初始任务节点,uo中只包含一个任务活动,即无人机海上侦察任务;Co为该任务的相关约束条件集,主要包括任务顺序关系、并发关系、等价关系、循环关系、条件关系等。
2)基于层次分解原则,对无人机海上编队侦察任务Wo进行分解,得到任务分网络W1=({u11,u12,u13,u14,u15,u16}),C1:u11表示明确任务,u12表示确定任务区域,u13表示确定任务完成时限,u14表示确定载荷匹配和放飞架次,u15表示航路规划,u16表示态势评估。
3)基于知识图谱构建的无人机海上侦察任务领域知识库如图6所示。

图6 无人机海上侦察任务领域知识库Fig.6 UAV maritime reconnaissance mission domain knowledge base
4)对W1进行任务粒度和关联性分析。根据式(1)可计算出子任务粒度量化指标Rt=6.25,满足5<Rt<10,符合任务粒度需求;根据式(2)可计算出子任务关联度量化指标En=0.389,满足En<1,阈值区间根据经验阈值设定。
无人机海上侦察任务规划分解结果及任务网络框图分别如图7和图8所示。

图7 无人机海上侦察任务分解结果Fig.7 Decomposition results of UAV marine reconnaissance mission

图8 无人机海上侦察任务网络框图Fig.8 Block diagram of UAV maritime reconnaissance mission network
5)对u15航路规划任务继续进行分解,得到对应的子任务网络d15=(ν31,ν32,ν33,ν34,ν35,ν36):ν31表示起飞许可,ν32表示爬升,ν33表示巡航上升,ν34表示侦察高度,ν35表示下降,ν36表示着陆。由于W1中k41、k42、k43、k44仍不满足相关性及粒度约束,需要进一步进行分解。
6)重复步骤3)和步骤4),直到所有任务分解完成并满足各种约束。
7)输出分解结果如下:h33对应的子任务网络d33=(k41、k42、k43、k44),k41表示飞行高度,k42表示飞行速度,k43表示搜索方式,k44表示航行约束条件;k41对应的子任务网络d41=(l51,l52),l51表示实用升限,l52表示悬停升限;k42对应的子任务网络d42=(l53,l54,l55,l56),l53表示最低速度,l54表示最大速度,l55表示航时巡航,l56表示航程巡航;k43对应的子任务网络d43=(l57,l58,l59,l60,l61),l57表示环扫,l58表示扇扫,l59表示纵飞侧扫,l60表示纵飞横扫,l61表示纵飞推扫;k44对应的子任务网络d44=(l62,l63,l64,l65),l62表示航路安全性约束,l63表示航油约束,l64表示最大航路总长度,l65表示环境约束。
8)结束分解流程。
5.3 结果分析
如图7 中,不同的连接线描述了复杂任务和子任务之间的层级关系及相互之间的关联性,斜杠表示该任务暂不执行,实线箭头表示不同层级任务间关系,虚线箭头表示任务之间的顺序类型。该方法将作战任务细化分解为子任务,并根据子任务的六元组信息,将作战任务能力需求和无人机性能指标相匹配,最终提取出无人机可执行的任务,实现了海上无人机侦察任务的快速自动化分解。
6 结论
本文针对无人机海上侦察任务分解问题,设计了一种作战任务分解网络建模方法,构建了子任务之间的相互关系,充分考虑了作战任务特点,提高了方法的有效性和实用性,较以往方法有一定改进;引入了基于知识图谱的领域知识库构建方法,分析并处理作战命令非结构化文本数据,直接找出作战任务和武器装备之间的对应关系;提出了自适应粒度任务分解方法,提高了任务分解效率,引入子任务粒度、子任务关联度计算方法,优化了任务分解结果;最后通过海上编队护航任务实例验证了方法的科学性和有效性。研究结果表明,该方法为无人机海上侦察任务分解提供了有效的解决途径,为今后多无人机任务规划研究提供了条件,具有较好的理论和应用价值。
猜你喜欢
粉末冶金技术(2021年3期)2021-07-28 06:26:16
南京大学学报(自然科学版)(2021年1期)2021-01-30 14:01:04
制造技术与机床(2019年6期)2019-06-25 10:17:46
水利科技与经济(2017年12期)2017-04-22 03:10:20
系统工程与电子技术(2016年12期)2016-12-24 07:19:14
中国交通信息化(2016年9期)2016-06-06 07:42:23
图书馆研究(2015年5期)2015-12-07 04:05:48
电源技术(2015年11期)2015-08-22 08:50:18
河南科技(2014年16期)2014-02-27 14:13:25
郑州大学学报(理学版)(2013年2期)2013-03-11 20:30:25