3D打印技术联合机器人导航掌侧入路微创加压螺钉内固定术治疗腕舟骨骨折
2024-04-19 08:27:06张丹龙梁少博魏巍庄岩张堃王虎
中华骨与关节外科杂志 2024年3期
张丹龙,梁少博,魏巍,庄岩,张堃,王虎
腕舟骨骨折约占腕骨骨折的80%,因该部位解剖结构及血供较为特殊,早期未得到有效治疗,会增加创伤性关节炎、无菌性缺血坏死等的发生风险,严重影响患者生活质量[1]。掌侧入路微创加压螺钉内固定术是治疗腕舟骨骨折的重要手段,可减轻桡动脉分支损伤,促进患者术后恢复,但该术式存在远端进针困难、固定效果差等问题,严重影响治疗效果[2-3]。近年来,3D 打印技术及机器人技术逐渐应用于各类骨折的临床治疗。有研究表明,个性化设计结合经皮空心螺钉内固定术治疗腕舟骨骨折的腕关节恢复优良率高达97%[4-5]。本研究通过分析3D 打印技术联合机器人导航掌侧入路微创加压螺钉内固定术治疗腕舟骨骨折的临床疗效,为提高手术治疗准确性、降低手术难度提供指导。
1 资料与方法
1.1 一般资料
纳入标准:①年龄14~60岁,精神正常、认知功能正常;②经X 线、CT 检查等证实为腕舟骨骨折,单侧患病,且就诊时间<72 h;③患者知情同意。排除标准:①存在严重内科疾病(如心脑血管病,肝、肾功能不全等)的患者;②合并恶性肿瘤的患者;③合并传染性或感染性疾病患者;④开放性骨折、陈旧性骨折、病理性骨折患者;⑤合并其他部位严重外伤者。
依据上述标准纳入2020 年4 月至2022 年12 月西安交通大学附属红会医院收治的90例腕舟骨骨折患者,采用随机数字表法分为常规手术组和机器人导航组各45例。常规手术组实施掌侧入路微创加压螺钉内固定术治疗,机器人导航组实施3D 打印技术联合机器人导航掌侧入路微创加压螺钉内固定术治疗。机器人导航组:男35例,女10例;年龄20~60岁,平均(40.1±5.3)岁;体重指数(body mass index, BMI)为18~30 kg/m2,平均(24.04±2.18)kg/m2;左侧20 例,右侧25 例;交通事故7 例,运动伤11 例,坠落伤12例,摔伤15 例。常规手术组:男33 例,女12 例;年龄18~60 岁,平均(39.8±5.2)岁;BMI 为 18~28 kg/m2,平均(23.41±2.11)kg/m2;左侧18例,右侧27例;交通事故5例,运动伤11例,坠落伤13例,摔伤16例。两组患者一般资料比较差异无统计学意义,具有可比性(P>0.05)。
本研究经西安交通大学附属红会医院医学生物科研伦理委员会审批通过(202003024),患者均签署知情同意。
1.2 手术方法
常规手术组实施掌侧入路微创加压螺钉切开复位内固定术治疗,沿桡侧腕屈肌腱经腕横纹切口,切口始于舟骨远极远端,长约3 cm,打开桡侧腕屈肌腱腱鞘并将肌腱向尺侧牵拉,桡动脉浅支远端牵拉或结扎。充分暴露腕关节囊及舟骨后,显露骨折端(在此过程中需尽可能保留韧带),将手在旋后、腕过伸位,轻度尺偏,以暴露舟状骨腰部,经患侧垫块纱布,在桡骨茎突和尺侧桡腕关节插入一个小骨撬,在直视下用骨撬撬拨复位,复位满意后在舟状骨轴线上插入导针,用微型钻头沿导针方式置入空心无头加压螺钉加压固定,当螺钉尾部全部置入骨内后包扎止血。
机器人导航组术前采用西门子SOMATOM Definition AS 128层螺旋CT扫描腕关节取旋后位,扫描范围为近指间关节至前臂中段,扫描厚度0.625 mm。将患肢CT 扫描数据进行数据分析,在舟骨中心区的矢状面、冠状面、轴面获取最佳位置并生成1.1 mm 钻孔,测定最佳螺钉长度,之后重建皮肤界面及骨骼模型,并以皮肤为界面重建5 mm 左右的导板(分为背侧、掌侧两面),导孔延续至导板外约5 cm,导板之间设定卡扣。将重建的导板文件生成3D打印模型。术中于桡骨茎突安装天玑机器人示踪器,连接天玑机器人导航系统,采集正位、侧位、舟骨位、旋前45°、旋后45°图像并上传系统,在系统中规划导针的进针点及进针深度,确认导针在舟骨中央区,利用3D打印模型,在模型上规划进针点及进针方向,在模型腕关节掌、背侧面安装相互平行的两个板卡紧,两板之间用齿状卡扣固定,进针、出针在导板上留下孔、做标记,然后将导板从模型上取下,固定于患者腕关节,利用导板上的孔确定进针点及进针方向,打入导针后透视下测量进针深度以确定螺钉长度,拧入长度合适的螺钉并进行固定。需要注意的是,在螺钉置入后需再次透视确认螺钉位置完全在舟骨内。
两组患者均采用臂丛神经阻滞麻醉,术后均进行抗感染治疗,术后24 h 指导患者进行腕关节功能训练。
1.3 随访计划及评价指标
术后1、3、6、12 个月进行随访,复查X 线片、CT检查等,观察患者骨折愈合情况。
评价指标包括:①手术时间、骨折愈合时间;②腕关节活动度:术前、术后12个月时,采用量角器测量腕关节掌屈、背伸、桡偏及尺偏活动度;③腕关节功能:术前、术后12个月时采用腕关节Mayo功能评分进行评估,包括疼痛、功能状态、活动范围、握力4项内容,每项25 分,总分100 分,90 分以上为优,80~90 分为良,60~79 分为可,低于60 分为差;④并发症发生情况。
1.4 统计学方法
采用SPSS 25.0 软件进行统计学分析,计量资料以均数±标准差表示,组间及组内比较行独立/配对样本t检验;计数资料以例数(率)表示,行χ2检验,若存在2 个期望计数≥1 且<5,则采用Fisher 精确检验。以P<0.05为差异有统计学意义。
2 结果
2.1 手术时间、骨折愈合时间比较
机器人导航组患者的手术时间、骨折愈合时间均优于常规手术组(P均<0.05,表1)。
表1 两组患者手术时间、骨折愈合时间比较(±s)

表1 两组患者手术时间、骨折愈合时间比较(±s)
组别机器人导航组常规手术组t值P值例数45 45手术时间(min)20.4±2.9 28.8±3.3 12.654<0.001骨折愈合时间(周)10.8±1.6 15.2±2.6 9.546<0.001
2.2 腕关节活动度比较
两组患者术后12 个月时腕关节各部位活动度均较术前有所改善,且机器人导航组改善效果优于常规手术组(P均<0.05,表2)。
表2 两组患者手术前后腕关节活动度比较(±s,°)
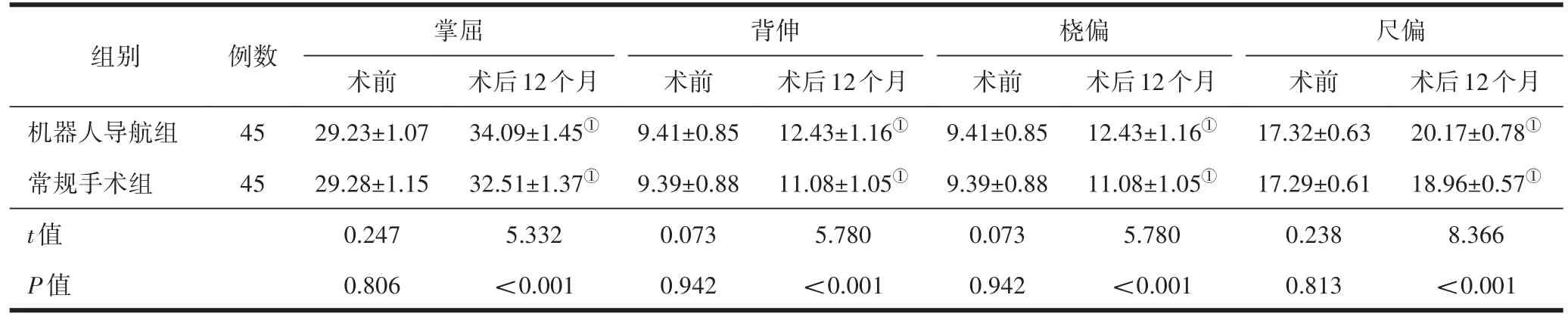
表2 两组患者手术前后腕关节活动度比较(±s,°)
注:①与同组术前比较,P<0.05。
组别例数术后12个月34.09±1.45①32.51±1.37①5.332<0.001背伸术前9.41±0.85 9.39±0.88 0.073 0.942术后12个月12.43±1.16①11.08±1.05①5.780<0.001桡偏术前9.41±0.85 9.39±0.88 0.073 0.942掌屈术前29.23±1.07 29.28±1.15 0.247 0.806尺偏术前17.32±0.63 17.29±0.61 0.238 0.813术后12个月20.17±0.78①18.96±0.57①8.366<0.001机器人导航组常规手术组t值P值45 45术后12个月12.43±1.16①11.08±1.05①5.780<0.001
2.3 腕关节功能比较
两组术后12个月时腕关节功能维度及总分均较术前有所提高,且机器人导航组提高效果优于常规手术组(P<0.05,表3)。
表3 两组患者手术前后腕关节功能比较(±s,分)
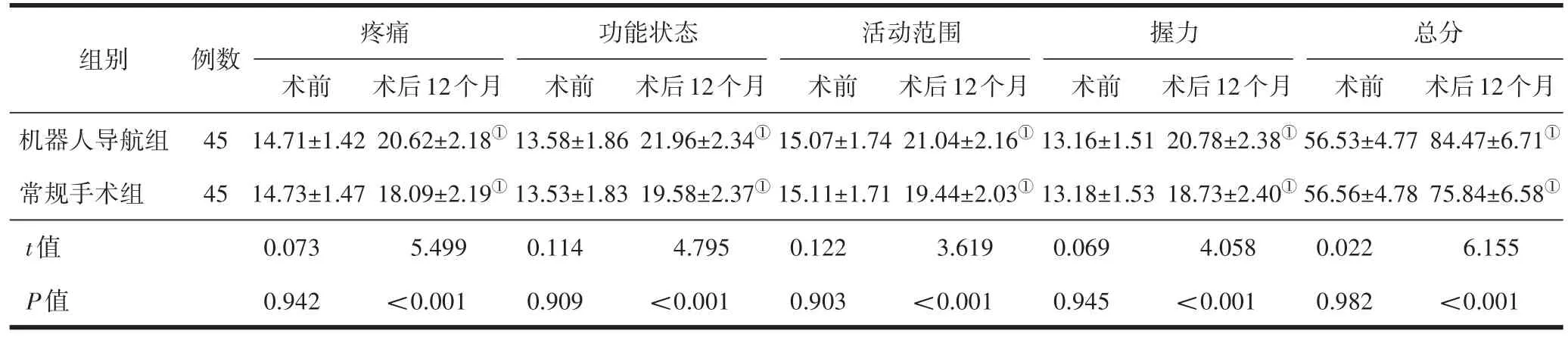
表3 两组患者手术前后腕关节功能比较(±s,分)
注:①与同组术前比较,P<0.05。
组别例数术后12个月20.62±2.18①18.09±2.19①5.499<0.001功能状态术前13.58±1.86 13.53±1.83 0.114 0.909活动范围术前15.07±1.74 15.11±1.71 0.122 0.903握力术前13.16±1.51 13.18±1.53 0.069 0.945术后12个月21.96±2.34①19.58±2.37①4.795<0.001总分术前56.53±4.77 56.56±4.78 0.022 0.982术后12个月21.04±2.16①19.44±2.03①3.619<0.001术后12个月84.47±6.71①75.84±6.58①6.155<0.001机器人导航组常规手术组t值P值45 45疼痛术前14.71±1.42 14.73±1.47 0.073 0.942术后12个月20.78±2.38①18.73±2.40①4.058<0.001
2.4 并发症
常规手术组术后随访期间出现1 例骨不愈,1 例创伤性关节炎、2 例切口感染,1 例血管神经损伤,并发症发生率为11.11%;机器人导航组仅1例出现切口感染情况,并发症发生率为2.22%。两组患者的症状均轻微,经辅助治疗后症状缓解或消失。两组并发症发生率采用Fisher 精确检验,差异无统计学意义(P=0.203)。典型病例见图1、2。
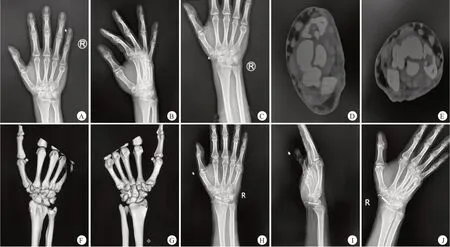
图1 患者,男,38岁,摔伤后右手腕疼痛8 h入院,诊断为右腕舟骨骨折,行3D打印技术联合机器人导航掌侧入路微创加压螺钉内固定术治疗

图2 患者,男,36岁,右手腕摔伤后疼痛8 h入院,诊断为右腕舟骨骨折,行掌侧入路微创加压螺钉内固定术治疗
3 讨论
腕舟骨骨折具有发病率高、迁延难愈等特点,其治疗关键在于促进腕舟骨解剖愈合,尽早恢复腕关节功能,降低并发症发生风险[6-7]。掌侧入路微创加压螺钉内固定术可通过螺钉固定骨折部位并对骨折端进行有效修复,疗效确切[8-9]。研究表明,掌侧入路微创加压螺钉内固定术在远极进针时导针只能与舟状骨的纵轴向背侧成角到达舟状骨的近极,这容易导致螺钉远端偏向舟状骨近极背侧,影响固定的稳定性,操作难度较大[10]。而且空心螺钉置入的位置、长度等也会影响固定效果[11]。如何提高手术精准性,准确、安全地确定空心螺钉位置是保障手术效果的关键。
3D 打印技术的发展及进步,为临床治疗腕舟骨骨折提供新的手段及思路。Schmidt 等[12]研究指出3D 打印技术可强化股骨髁内侧皮瓣舟状骨重建效果,促进术后恢复。本研究观察腕舟骨骨折患者手术相关指标发现,3D 打印技术联合机器人导航掌侧入路微创加压螺钉内固定术可有效缩短手术时间,控制术中出血量,促进骨折愈合时间。3D 打印技术是依据患者的骨折情况经计算机处理后得到3D 模型,再结合天玑机器人导航,利于操作医师判断术中进针角度、固定方式、螺钉长度等重要手术参量,且在进行3D打印导板制作时,手腕部尽量背伸尺偏,这与术中经舟骨结节导针、螺钉置入方向一致,将3D模型中内固定物的置入方式与患者体位、骨折部位等结合进行相关手术操作,提高了手术的精确性及成功率[13-14]。3D 打印技术联合机器人导航使操作医师可以清晰完整地了解骨折端细节,利于医师术前进行全面、逼真的模拟操作,进而完善手术设计,提高手术安全性及精确性,保证手术效果,更好地促进骨折愈合[15-16]。此外,3D打印技术联合机器人导航掌侧入路微创加压螺钉内固定术,在术前建立3D模型,以确定最佳置钉轨迹,并指导术中骨折复位及固定操作,在减小误差的同时,可缩短术中穿刺、透视、摆体位时间及选取螺钉时间,进而缩短手术时间[17-18];加之掌侧入路微创加压螺钉内固定术是从远端进针,避免桡动脉分支损伤,维持骨折处血供,控制术中出血量[19];而3D 打印技术联合机器人导航可提高手术的精确性及安全性,并降低手术操作的技术性难度[20]。
腕舟骨靠近排桡侧,其与桡骨形成关节,可有效维持腕关节稳定[21]。当患者发生腕舟骨骨折后,腕关节功能及活动范围受限,影响患者日常工作及生活。本研究观察腕舟骨骨折患者腕关节活动度及功能发现,3D 打印技术联合机器人导航掌侧入路微创加压螺钉内固定术可促进腕舟骨骨折患者腕关节活动度及功能改善。3D打印技术联合机器人导航掌侧入路微创加压螺钉内固定术在术前建立3D 模型,术中依据模型调整导针进针方向时可获取同一体位的不同影像学资料,利于术中精准穿刺及骨折端愈合,进而促进腕关节活动度及功能改善[22]。何雨生等[23]研究指出,3D 打印技术联合机器人导航在腕舟骨骨折内固定术中应用,可有效降低术后并发症发生率。本研究中机器人导航组的并发症发生率为2.22%,低于常规手术组的11.11%,但两组比较差异无统计学意义,分析原因可能与样本量有关,但仍可提示3D打印技术联合机器人导航掌侧入路微创加压螺钉内固定术的安全性较好,与术前通过建立3D 模型提高手术治疗的精确性、减少术中损伤等有关。
4 结论
3D打印技术联合机器人导航掌侧入路微创加压螺钉内固定术可缩短腕舟骨骨折的手术时间、降低术中出血量、促进骨折愈合、可更好地促进腕关节活动度及功能恢复,且安全性较好。
【利益冲突】所有作者均声明不存在利益冲突
猜你喜欢
中国民间疗法(2023年1期)2023-04-05 23:39:18
实用手外科杂志(2022年2期)2022-08-31 09:47:38
临床骨科杂志(2021年4期)2021-08-20 02:04:14
中国临床医学影像杂志(2019年5期)2019-08-27 02:47:56
中国临床医学影像杂志(2019年4期)2019-06-18 10:54:58
实用临床护理学杂志(电子版)(2017年40期)2017-11-03 10:57:46
上海针灸杂志(2017年7期)2017-07-24 15:55:16
中国医学装备(2016年6期)2016-12-01 06:44:26
实用手外科杂志(2015年1期)2015-08-27 01:52:10
中华骨与关节外科杂志(2014年4期)2014-04-08 02:55:54