基于负载追踪补偿的大电流LDO 设计*
2024-04-18 05:08:34黄登华
电子技术应用 2024年3期
朱 琪,黄登华
(中国电子科技集团公司第五十八研究所,江苏 无锡 214072)
0 引言
随着5G 通信和大数据计算的迅速发展,大规模集成电路(如CPU,DSP)工作电流可达安培级别[1]。当采用LDO 为CPU/DSP 供电时,芯片内各个模块的通断将导致LDO 负载电流发生突变,从而使LDO 的输出电压产生毛刺,最终引起CPU/DSP 整体功能异常,因此如何设计具有大电流输出能力和良好瞬态性能的LDO 具有重要研究意义[2-4]。
大的电流输出能力要求LDO 具有较大面积功率管,功率管栅端寄生电容将导致LDO 环路带宽减小[5],其与提升瞬态性能需实现大带宽的要求相矛盾。目前,国内外研究者提出了在输出功率管前级插入电压缓冲器以提高功率管栅端电压摆率[6-8]和采用多环路架构[9-10]以降低静态功耗等方法来同时满足大电流LDO 对带载能力和瞬态响应性能的要求,但其存在导致电路效率降低[11]和设计结构变复杂等问题。
为了克服上述问题,本文通过对LDO 小信号模型的分析,基于TSMC 0.18 µm BCD 工艺和负载追踪补偿方式提出了一种大电流LDO 的设计技术,其可在最大6 A负载范围内确保电路具有良好的瞬态响应特性,且所设计电路在维持环路低频增益不变的情况下可抑制高频下环路节点阻抗从而降低环路补偿难度,最终实现对输出电流能力和瞬态响应性能的良好折中。
1 传统大电流LDO 架构
图1 所示为传统大电流LDO 典型架构。图1(a)中增益级数较少,单级增益较大,高增益级所引入的低频极点将提升米勒补偿的复杂度。此时还需采用大电流BUFFER 对输出功率管进行驱动,电路静态功耗较大。图1(b)中通过提升增益级数从而降低单级增益方式,实现将环路中极点挪至带宽以外的目的,最终确保电路无稳定性风险,但较多的增益级将导致电路在失调和噪声性能方面的弱化。

图1 传统大电流LDO 典型架构
2 负载追踪补偿的大电流LDO 小信号模型
本文所设计负载追踪补偿的大电流LDO 小信号模型如图2 所示。图2 中gm1和gm2代表LDO 中运放第一级和第二级跨导,R1和C1代表运放第一增益级等效输出电阻和寄生电容,R2和C2代表运放第二增益级等效输出电阻和寄生电容。本设计中输出功率管由N 型MOS 构成,其被等效为单位增益电压缓冲器X1 和电阻1/gmn串联的结构。Ro和Co代表负载电阻和输出电容。RC和CC用于实现运放第一增益级的负载追踪补偿[12-13],RZ用于实现运放第二增益级的负载追踪补偿。

图2 负载追踪补偿的大电流LDO 小信号模型
图2 中LDO 由两个高增益级和一个电压缓冲器组成,可轻易实现高环路增益以满足稳态时对电路输出精度的要求。如未采取负载追踪补偿则环路中在V1处将存在低频极点1/R1C1,在V2处将存在低频极点1/R2C2,这两个低频极点将影响高频下电路稳定性。本文将分别从定性和定量角度出发,分析负载追踪补偿如何在不影响环路低频阻抗从而维持环路低频增益不变的同时,对环路高频阻抗进行抑制从而将V1和V2处极点推向高频,最终电路在保持稳态输出精度的同时具有良好的瞬态性能。
从定性角度出发,节点V1处负载追踪补偿由电阻RC和电容CC的串联网络实现,随着工作频率的升高,RC和CC的等效串联阻抗开始降低,在高频段V1处等效对地阻抗为R1//RC。由于RC被设置为远小于R1,高频段V1处等效对地阻抗约为RC,此时V1处极点由低频1/R1C1被推向高频1/RCC1处,因此RC和CC在不改变运放第一级增益为gm1R1的前提下实现了提升高频段V1处极点频率的目的。节点V2处负载追踪补偿由前馈电阻RZ实现,在低频段X1 增益为1,流过RZ电流为零,因此低频时第二级增益可保持为gm2R2。随着工作频率上升,受输出端极点影响X1 增益开始下降,RZ两端压差不再为零,高频时V2处节点阻抗为R2//RZ≈RZ,此时V2处极点由低频1/R2C2被推向高频1/RZC2处,因此RZ在不改变运放第二级增益的前提下实现了提升高频段V2处极点频率的目的。此外RC和RZ均被设计为与输出负载相关的可变电阻,以减小负载变化对环路带宽和相位裕度的影响。
为定量分析图2 中电路补偿效果,式(1)~式(4)首先给出电路整体传输函数及各节点零极点分布表达式。
电路整体传输函数:
V1处零极点分布:
V2处零极点分布:
VO处零极点分布:
从式(2)及式(3)可知,V1和V2处均包含一个低频零极点对和一个高频极点,因此环路带宽由高频极点p1_hf和p2_hf决定,不再受低频极点p1和p2限制。
图3 所示为理想情况下,图2 中电路经补偿后各增益级传输曲线特性。经补偿后中频段V1和V2处存在低阻区域,且由于零点z1和z2的存在寄生的高频极点被推至环路带宽以外,最终相位裕度由输出极点po、p1_hf和p2_hf决定。
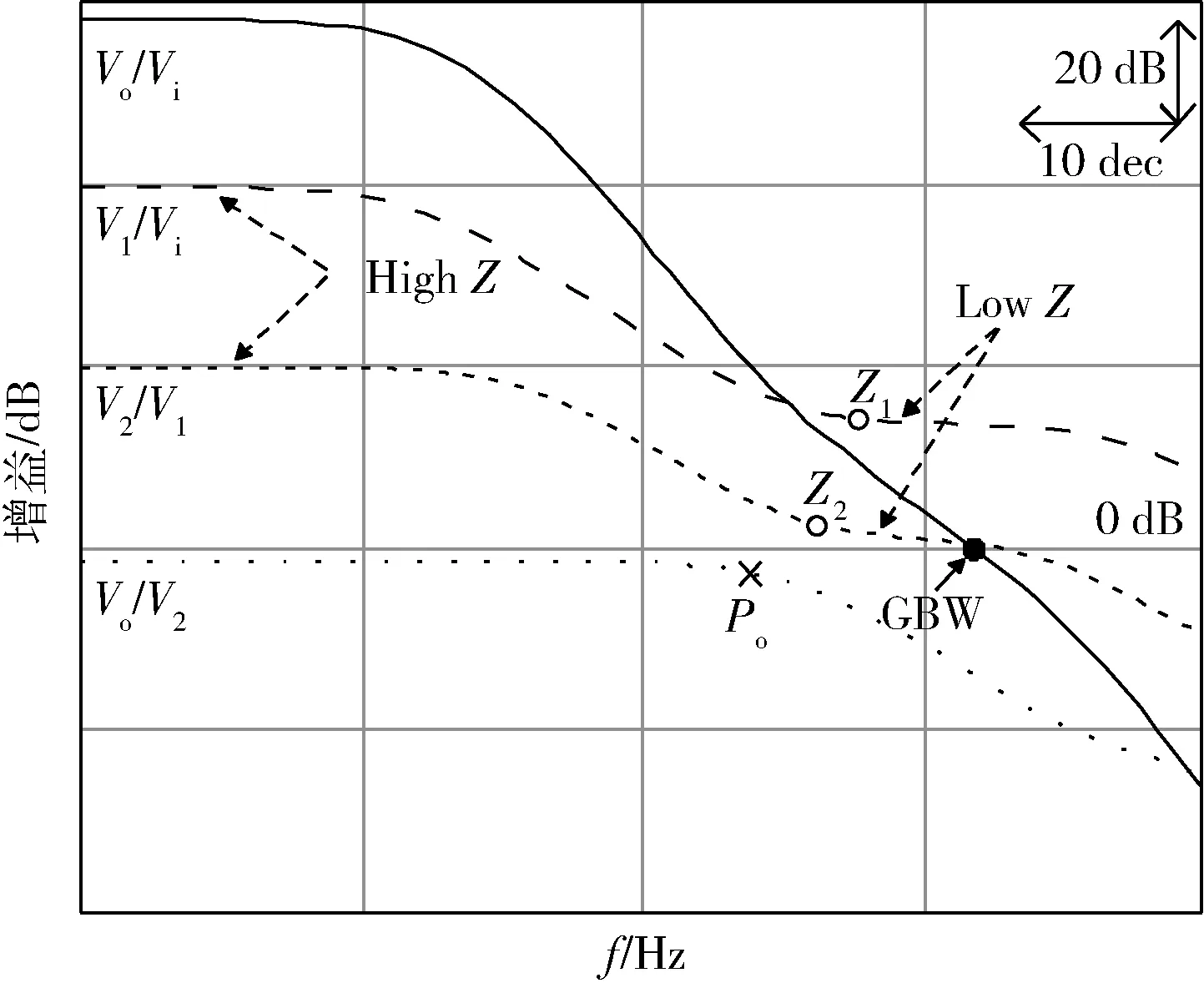
图3 理想情况下LDO 各增益级传输特性
3 负载追踪补偿的大电流LDO 电路实现
图4 为本文所提出基于负载追踪补偿的大电流LDO具体电路实现,其第一增益级为5 管运放,第二增益级为电流镜型运放,输出功率级为N 型MOS 管。电阻R2和R3用于降低电路静态功耗。电阻R1和R4用于平衡空载时电路中各节点静态工作点。电容CB在MP2漏端与栅端之间引入一条高频负反馈支路,用于提升电路在高频段的PSRR。图4 中虚线框内器件为负载追踪补偿网络具体实现,MN3代表可变电阻RC,MN2代表可变电阻RZ,负载电流信息由电流镜MN2-MN和MP1-MP2进行采样,流过MN1和MN2的电流与负载相关,合理设置MN3和MN2尺寸即可获得所需可变电阻RC和RZ。本设计中用于补偿的负载追踪可变电阻由电流镜镜像方式获得,电路鲁棒性较强,受工艺参数变动影响较小,此外MN2中电流最终流向负载,因此该补偿方式不会导致电路功耗增加。
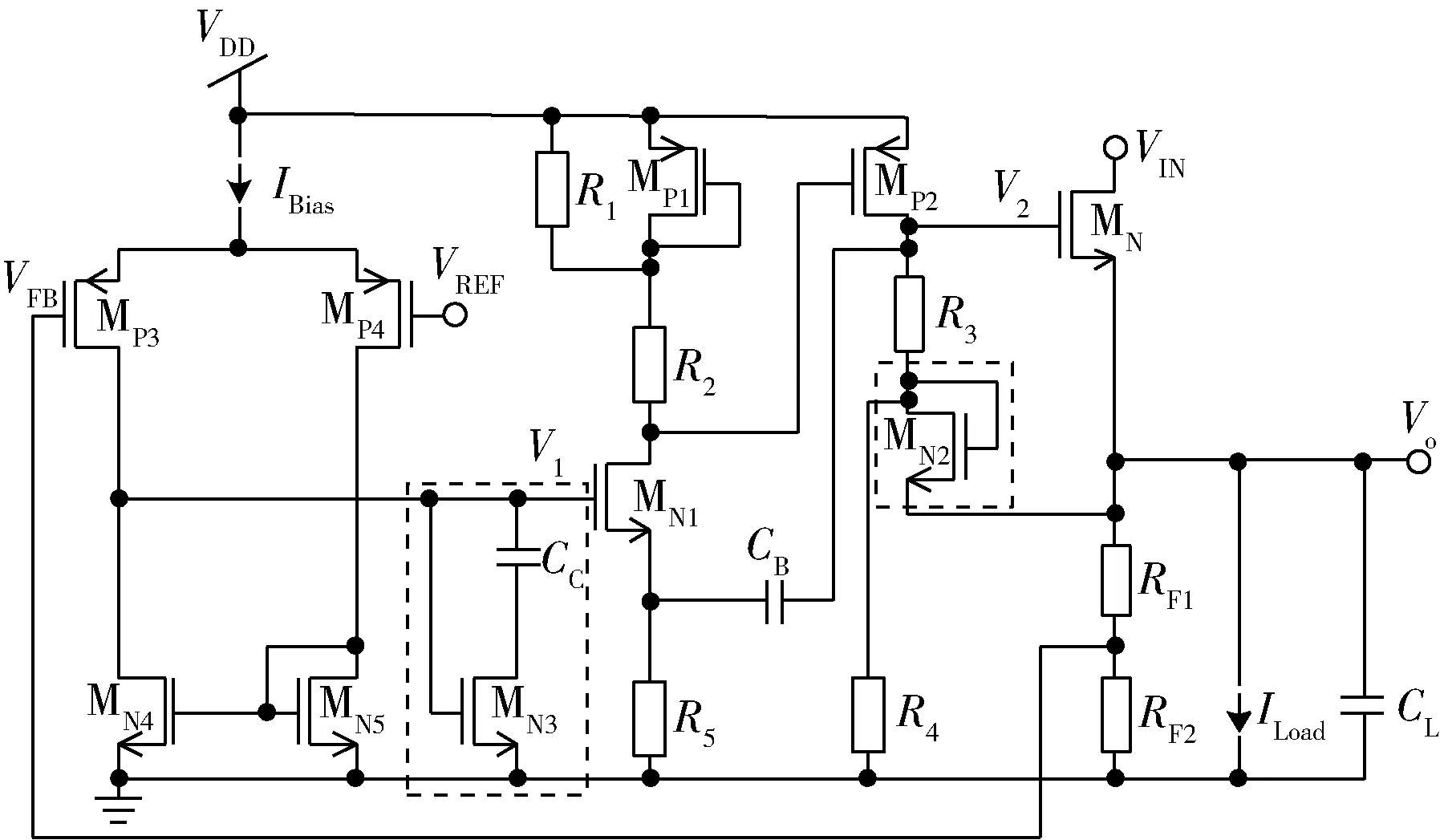
图4 负载追踪补偿的大电流LDO 结构
图5 为轻重载下LDO 各增益级频率响应曲线及其零极点分布仿真结果。随着负载电流的增大,输出极点po向高频移动,同时用于环路补偿跟随负载变化的零点z1和z2也相应向高频移动,从而达到提升带宽目的且避免了po变化对环路相位裕度的影响。

图5 轻重载下LDO 各增益级零极点分布
4 仿真与结果分析
基于TSMC 0.18 µm BCD 工艺,对本文所设计LDO进行了仿真验证,给出了整体环路AC 特性曲线、负载调整率、线性调整率、电源抑制比和负载瞬态响应仿真结果。
图6中LDO环路AC特性仿真结果表明,负载为2.2 mA时,环路相位裕度为45°,带宽为87.37 kHz。当负载增大至6 A 时,环路相位裕度为59.4°,带宽为1.48 MHz。LDO 环路具有较大带宽,且相位裕度受负载变化影响较小,电路在全负载范围内可保持稳定。

图6 LDO 环路AC 特性曲线
图7 所示为1 V 输出条件下,电路负载调整率和线性调整率仿真结果。受益于本文所提出负载追踪补偿方式并未降低LDO 环路低频增益,因此负载调整率小于0.51 mV/A,线性调整率小于0.25 mV/V,电路稳态精度较高。

图7 负载调整率和线性调整率曲线
图8 为电路电源抑制比仿真曲线,可以看出电路对电源噪声具有良好的抑制特性。在10 kHz 和1 MHz 频率时PSRR 分别为-51 dB 和-30 dB,且由于环路大带宽和图3 中CB所引入高频负反馈支路的存在,全频率范围下电路PSRR 小于-15 dB。

图8 电源抑制比曲线
图9 表明面对0~6 A,斜率为1 A/μs 的负载电流突变,输出电压下冲为36.6 mV,恢复时间为12.5 μs。输出电压过冲为35.3 mV,恢复时间为56.3 μs。电路瞬态精度较高,瞬态误差小于2.4%。

图9 LDO 负载瞬态响应曲线
表1 为本文与其他参考文献中LDO 性能对比,可知本文所设计LDO 综合性能良好,在最大输出电流能力、输出精度和电源抑制比方面均具有显著优势。

表1 本文与其他文献中LDO 性能对比
5 结论
本文提出了一种用于大电流LDO 的负载追踪补偿技术,其采用负载追踪补偿方式消除了电路输出端极点随负载变化时对环路稳定性的影响,实现了电路面对大负载电流突变时具有良好的瞬态性能,同时大的环路增益提升了电路稳态输出精度。仿真结果表明,电路可在6 A 负载范围内保持输出稳定,瞬态误差小于2.4%,负载调整率小于0.51 mV/A,线性调整率小于0.25 mV/V。
猜你喜欢
防爆电机(2020年3期)2020-11-06 09:07:36
上海公路(2018年4期)2018-03-21 05:57:46
电测与仪表(2016年2期)2016-04-12 00:24:36
中国光学(2015年5期)2015-12-09 09:00:39
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07
核科学与工程(2015年2期)2015-09-26 11:57:13
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年15期)2014-04-04 12:05:34
电测与仪表(2014年8期)2014-04-04 09:19:36