压电驱动的快速刀具定位台自抗扰控制研究*
2024-04-14 07:37:24胡高峰逯俊体
制造技术与机床 2024年4期
胡高峰 逯俊体
(①天津职业技术师范大学机械工程学院,天津 300222;②天津市高速切削与精密加工重点实验室,天津 300222)
快速刀具定位台是为超精密车削加工而研发设计的,通过压电驱动完成传动,利用自身所具有的高响应频率、高刚度及高精度等特性,驱动刀具在运动方向快速微进给,能够实现复杂面形工件或结构的精密加工[1]。由于压电材料本身具有的迟滞和蠕变特性会严重影响控制精度,因此,制定有效的控制策略以实现高精度的驱动和定位控制具有极为重要的实际价值。
国内许多学者对于压电驱动器的控制有较多的研究,总结起来主要有3 种控制方法[2],即迟滞逆模型前馈补偿控制、闭环控制以及结合迟滞逆模型的复合控制。根据具体情况选择适当的输入电压,并利用定位台获取输出位移,以建立准确的迟滞模型描述定位台的运动特性,进而应用多种控制策略,例如自抗扰控制,以提升定位台的控制精度,同时消除或减小其受到迟滞非线性特性的影响。国外采用类似的控制策略来提高压电驱动器的控制精度。综合起来,用于快速刀具定位台迟滞建模的模型主要有PI 模型、KP 模型、Duhem 模型等[3]。
本文的主要研究内容是对比单频输入时迟滞逆模型的前馈补偿控制和自抗扰控制方法的动态响应及跟踪误差,分析了两种控制方法的均方根误差(root-mean-square-error,RMSE)和相对误差(relative-error,RE),实验验证了自抗扰控制策略的优越性。
1 快速刀具定位台及其模型
1.1 快速刀具定位台的组成
快速刀具定位台控制系统实验装置由上位机、Dspace(MicroLabBox)、压电陶瓷驱动电源(芯明天E01.D1)、主动隔振台、电子显微镜和快速刀具定位台(P92.X70C)组成,如图1 所示为定位台的测试系统,为了减小因结构和机构振动而引起的数据误差,将主动隔振台固定在气动隔振光学平台上[4]。快速刀具定位台的技术参数见表1。
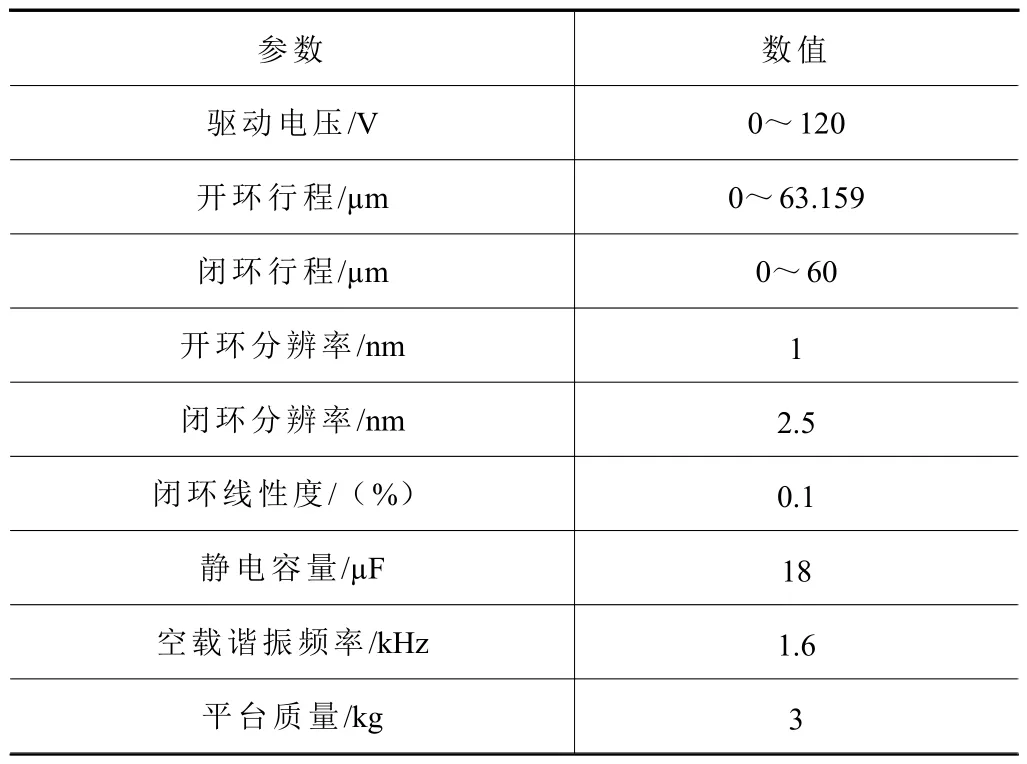
表1 压电驱动的快速刀具定位台的技术参数

图1 快速刀具定位台的测试系统
1.2 快速刀具定位台的数学模型
压电驱动的快速刀具定位台包括电气和机械两部分[5],如图2 所示。

图2 快速刀具定位台的电气和机械模型
图2 中,kamp为建模时的增益,R0为驱动电路的等效电阻,vh为由于迟滞所产生的电压值,H(q)、Tem代表压电效应,是一种具有变压比的机电换能器,CA表示与变压器并联的总压电陶瓷的电容之和,PCA 中的总电荷为q,流过电路的电流为,存储在线性电容CA中的电荷表示为qc,电荷qp是由于压电效应从机械部分转换的电荷,vA是转换的电压,FA为电气部分的转换力,x为机械部分的输出位移,m、bs、ks分别为运动机构的质量、阻尼系数、刚度[6]。
定位台的模型一般是由迟滞模型和线性模型共同表示,如图3 所示。

图3 快速刀具定位台的动态模型
图3 中的vin(t)为控制输入电压,w(t)为迟滞模型的输出,x(t)为定位台的位置输出,P(vin(t))表示迟滞非线性函数,G(s)表示为线性部分函数。
定位台的数学模型表达式为
1.3 快速刀具定位台模型辨识
定位台线性部分可由输入阶跃信号得出,即
其中:s为Laplace 算子,线性模型输出与实验数据结果如图4 所示。

图4 线性模型预测与实验数据图
PI 迟滞模型的表达式具有简洁的特点,且其逆模型便于求取,在实际应用中对于控制器的合理设计至关重要。基于其对表达迟滞特性方面具有突出的优点,PI 模型在系统补偿上的应用比较广泛[7]。
PI 迟滞算子的数学表达式可表示为
式中:bi为可调权重系数,且bi>0,r为基本迟滞单元pr[x]的阈值,迟滞单元pr[x]的表达式为
式中:y(t) 为输出信号;x(t)为输入信号。
n个不同阈值、不同权重系数的间隙算子叠加成为PI 迟滞算子,即
根据具体输入信号,选择合适的间隙算子和阈值的数量,并根据式(1)~式(4)得到与实验迟滞曲线拟合最佳的间隙算子权值[8]。
式中:H*(V(t)) 为PI 迟滞模型曲线;L(V(t))为实验时定位台的动态定位曲线。
对于PI 迟滞逆模型的逆算子,按照式(5)做相应的变换:
实验采用10 Hz 时的实验数据对Prandtl-Ishlinskii 迟滞模型的参数辨识,即对定位台施加10 Hz频率的电压信号作为输入,采集相应的输出位移数据。随后,通过分析输入电压信号和输出位移信号,可推导出相关参数。
由式(4)可知,x(t)为输入信号,选择输入信号为
记录定位台的定位数据,形成定位台的动态定位曲线L(V(t)),取16 个间隙算子叠加得到PI 迟滞模型对实验曲线进行拟合,由式(6)得到最佳间隙算子权值见表2。
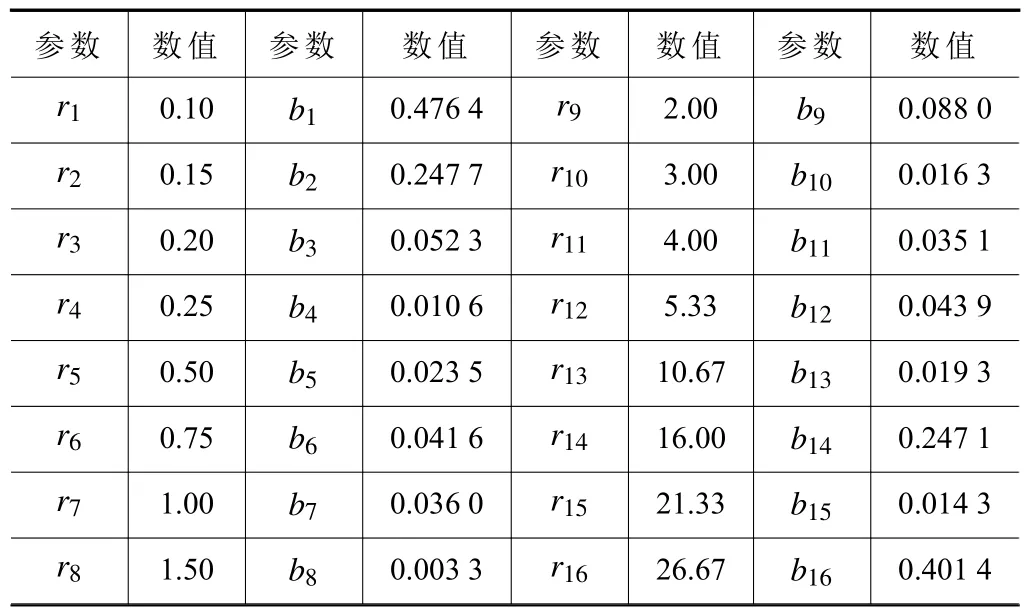
表2 定位台PI 迟滞模型参数辨识值
同理,取16 个PI 迟滞算子的逆算子线性叠加得到PI 迟滞逆模型,定位台PI 迟滞逆模型参数值由式(7)得出,见表3。辨识所得拟合迟滞模型曲线与实际迟滞模型曲线对比如图5 所示。利用RMSE 和RE 描述定位台的建模误差指标见表4。
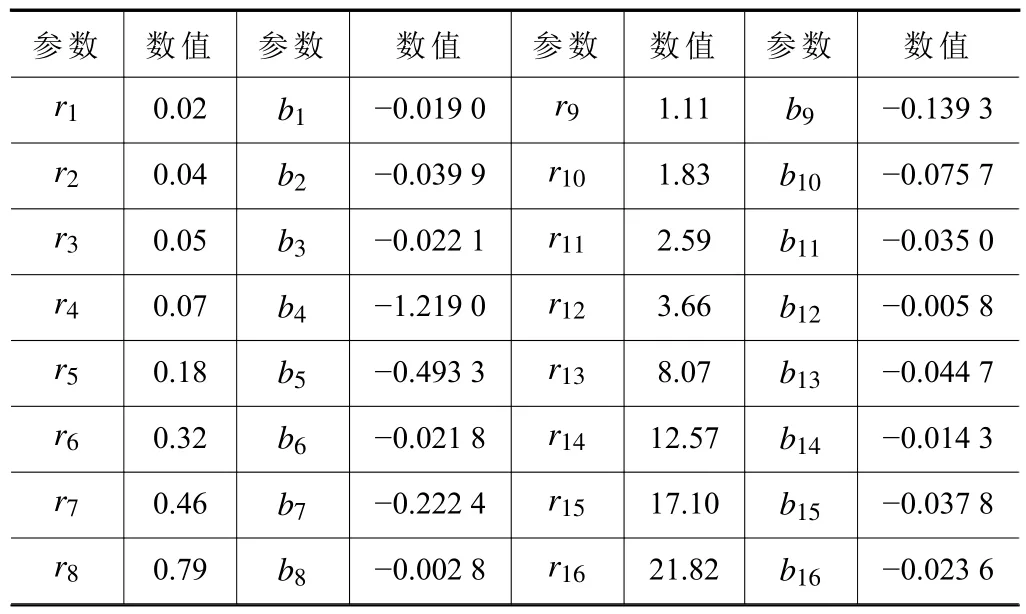
表3 定位台PI 迟滞逆模型参数辨识值

表4 定位台的建模误差

图5 拟合迟滞模型曲线与实际迟滞模型曲线对比图
由表4 建模误差可得,PI 模型拟合的迟滞曲线较实测数据拟合曲线的均方根误差和相对误差更小,即拟合迟滞模型的RMSE和RE分别比实际模型小0.211 4 μm 和0.285 8%,因此PI 模型可以较好地拟合迟滞曲线。
2 快速刀具定位台的自抗扰控制设计
根据系统的控制要求,设计四阶扩张状态观测器,对于外界影响导致的扰动d(t),可考虑到总扰动中。式(1)可变换为[9]:
式中:y为对应的输出位置,f为系统的总扰动。
2.1 扩张状态观测器与控制律的设计
考虑到四阶受控系统,令
设观测值为zi,当总扰动已知时,所设计的观测器为
式中:L为可变增益,即
控制律可设计为
式中:u为定位台的输入电压;当系统总扰动可被估计时,有
5.情境扮演式教学。情境扮演式教学是指在教学过程中,扮演不同警务工作人员和场景,突出礼仪技能的运用,在训练中教师要对学生进行充分引导,并留有足够的发挥空间,让学生自由发挥,增强学生身临其境的实际感受,激发他们在不同情境下的创造性,帮助学生掌握礼仪规范的教学方法。重点是教师应及时将情境扮演过程中所反映出来的问题归纳总结,做出引导和指导,便于学生整体把握。如此不但有利于学生牢固掌握所学的警察礼仪规范知识,还有利于他们将理论内化后更好地运用于实际之中。
系统动态模型变换为串级积分器形式,则控制量uc的表达式可变换为
式中:yr为定值;ki为可调控制参数[10]。
2.2 自抗扰控制作用下定位系统的闭环稳定性
考虑到系统的迟滞特性,闭环系统模型为
式中:e0i=xi-zi,(i=1,···,4)为观测器的估计误差。
令
代入式(18)则有
对于此解,存在常数ki>0,i=1,2,3使跟踪误差收敛,即,则跟踪误差有界。从而可得出对于有界的输入信号,系统输出信号同样有界,即定位闭环系统是稳定的。
3 定位台系统跟踪控制对比实验
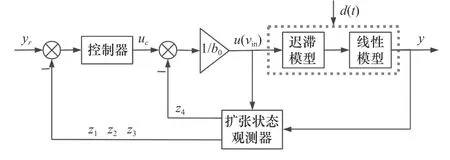
图6 定位台闭环控制系统结构图
根据控制器参数化和优化的方法,应满足以下条件
式中:ωc、ω0分别为控制器和观测器的带宽。
采用均方根误差(RMSE)和相对误差(RE)两种量化指标,定量比较自抗扰控制与逆模型前馈控制的控制效果。
3.1 迟滞逆模型前馈补偿控制实验
对定位台输入10 Hz 的单频正弦波信号,采集定位台的输出位移与期望位移对比来验证前馈补偿控制器的控制效果,并绘制实验位移输出曲线,图7 分别为前馈控制下10 Hz 时定位台的期望输出位移和实际输出位移对比图和误差曲线图。

图7 前馈补偿控制时间-位移响应曲线图
通过前馈补偿实验可以得到,实际位移与期望位移存在一定的误差,即均方根误差RMSE为1.155 7 μm,相对误差RE为2.111 4%,对于实测迟滞曲线有较好的提升效果,表明了前馈补偿控制对于迟滞特性具有较好的补偿。
3.2 定位系统自抗扰控制实验
为了达到控制变量的效果,参考输入同样为10 Hz 的单频信号,分别采用正弦输入信号、三角波输入信号、方波输入信号进行自抗扰控制实验验证其控制效果。
选择10 Hz 正弦波输入信号:
10 Hz 三角波输入信号:
10 Hz 方波输入信号:
通过仿真实验可以得到,如图8 所示自抗扰控制时间-位移曲线图。

图8 自抗扰控制时间-位移响应曲线图
为了更直观地比较应用自抗扰控制对定位系统的控制精度,图9 给出了自抗扰控制时间-位移跟踪误差曲线图。逆模型前馈控制及自抗扰控制各输入信号的控制误差见表5。

表5 逆模型前馈控制及自抗扰控制各输入信号的控制误差

图9 自抗扰控制时间-位移跟踪误差曲线
从实验图可以得出,升降曲线在大部分阶段基本一致,表明在单频输入信号下,自抗扰控制能够较有效地减小迟滞特性,然而在逆模型前馈补偿控制下,误差曲线整体呈现较大幅度。相比之下,经过自抗扰控制后,误差曲线的幅度显著减小;从控制误差表的数据可以得出,自抗扰控制的系统均方根误差较逆模型前馈补偿控制下降了1.137~1.137 5 μm;对比系统相对误差,自抗扰控制较逆模型前馈补偿控制明显更小、更稳定。
4 结语
(1)通过实验进行对比分析,自抗扰控制较逆模型前馈补偿控制具有更高的控制精度,但逆模型前馈补偿控制对比未进行控制的实验迟滞环,其控制精度也十分明显。
(2)从跟踪控制实验数据中得出,自抗扰控制RMSE和RE都有明显的下降,即控制误差相对较低、精度更高,说明在单频输入信号下,自抗扰控制较逆模型前馈补偿控制有更好的优越性。
(3)在刀具定位台高控制精度的场合下,基于自抗扰补偿控制算法更能满足要求。
猜你喜欢
数学物理学报(2021年2期)2021-06-09 08:54:26
应用数学(2020年2期)2020-06-24 06:02:44
制造技术与机床(2019年11期)2019-12-04 05:50:14
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
宇航计测技术(2018年3期)2018-09-08 02:21:36
制造技术与机床(2017年7期)2018-01-19 02:29:55
物联网技术(2017年7期)2017-07-20 14:09:05
数学物理学报(2016年3期)2016-12-01 05:36:27
发明与创新(2016年5期)2016-08-21 13:42:48
纺织导报(2014年9期)2014-10-31 00:07:58