
空间无人作业车无线充电系统设计
2024-04-12 07:13李嘉禄曾宪瑞马力君
电源技术 2024年3期
赵 健,李嘉禄,曾宪瑞,鲁 伟,马力君,
(1.中电科蓝天科技股份有限公司能源系统事业部,天津 300384;2.北京空间飞行器总体设计部,北京 100094)
随着我国航天技术的迅猛发展,对空间无人作业车的各方面性能提出了更高的要求,高效便捷地获取能量是其必然的发展趋势。传统的有线充电方式存在频繁插拔的物理接口,易受空间辐照的影响,具有易老化、易接触不良的特点,降低了系统的可靠性;同时空间无人作业车自主导航对正能力有限,可能需要采用额外的机械手去对接有线充电装置,增加了系统的发射成本。无线充电方式可以较好地克服上述缺点,提高空间无人作业车的供电可靠性。不同于地面环境,宇航环境条件恶劣,对无线充电系统提出了更高的设计要求,主要体现在强抗偏移能力、强抗辐照能力、强温度适应性等方面。
当前空间无人作业车无线充电技术的相关研究主要集中在国外。2018 年东京大学设计了一套用于空间无人车的无线充电系统,实现了48.6 W 以及62.1%的技术指标[1]。2020 年密歇根理工大学提出了一种用于无线充电线圈对准的视觉识别导航算法,并实现了24 W 的无线功率传输,在复杂环境下对准成功率达73%[2]。2022 年日本宇航研究机构提出了一种利用无线充电方式对空间无人车舱加热保温的方法,接收线圈置于舱板上,外面覆盖多层新型的导磁隔热材料,相比传统隔热材料系统涡流损耗大大减小,线圈间效率由54%提升至90.7%[3-4]。2020 年加拿大卡尔顿大学的学者为应对宇航空间复杂环境下系统失谐的问题,提出了一种无线充电自适应调谐方法,可使无线充电系统失谐时自适应调谐。2022年,在博世、华盛顿大学和NASA 格伦研究中心的协助下,Astrobotic 公司和WiBotic 公司设计的月面无线充电系统成功通过了测试,系统传输效率为80%~85%,可以使月球车顺利通过长达14 d 的月夜。同年在巴黎举行的第73 届国际宇航大会上,Astrobotic 公司宣布推出LunaGrid,其可以通过无线充电方式向月球车以及其他月球表面系统提供瓦级的能量。
国内有关空间无人作业车无线充电系统的研究较少,为了填补领域空缺,本文从系统的硬件拓扑以及控制策略等方面对无线充电系统展开研究,并设计了一个空间无人作业车无线充电系统的初步样机,验证设计方案的可行性。
1 无线电能传输系统拓扑
空间无人作业车无线充电系统的原理框图如图1 所示,由位于能源补给站的发射侧装置以及位于空间无人作业车上的接收侧装置组成。太阳电池板以及其他形式的能源通过电能变换装置转为直流电,再经过高频逆变电路、发射侧补偿电路以及发射线圈转换为高频磁场,接收线圈将捕获的高频磁场转换为高频交流电,再经过接收侧补偿网络、电能变换装置等为蓄电池供电。
原边高频逆变环节采用全桥逆变,具有器件应力较小且输出谐波成分小的优点,副边电能变换环节采用全桥不控整流与DC 模块级联的拓扑结构,具有结构简单、充电控制响应快速且稳定的优点。
1.1 补偿网络
由图1 可知,补偿网络是无线电能传输系统中的关键环节。文献[5]指出采用无功补偿网络补偿系统的无功功率是实现无线充电系统高效传能的关键条件之一,所以需要使系统在变负载以及变耦合工况下仍可满足零相角输入条件。串串(series-series,SS)、双边LCC(inductor-capacitance-capacitance)、双边LCL(inductor-capacitance-inductor)、LCC/S(inductorcitance-capacitance/series)、LCL/S(inductor-capacitance-inductor/series)等补偿拓扑的零相角输入频率不会受负载以及互感的影响[6-7],其中LCC-S 补偿拓扑具有输出恒压、发射线圈电流恒定、空载启动安全以及鲁棒性高等优势。因此,LCC/S 补偿拓扑更适合应用于空间无人作业车无线充电系统,LCC/S 补偿拓扑的拓扑结构图如图2 所示。
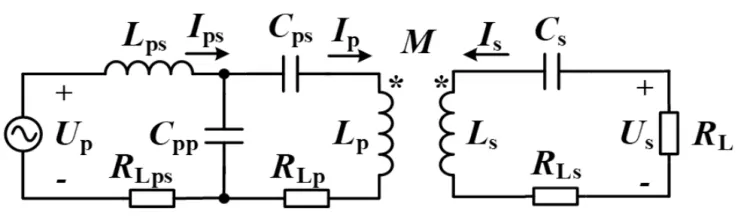
图2 LCC/S补偿拓扑图
图中:Up为原边补偿拓扑输入电压;Lps为原边串联补偿电感;RLps为原边串联补偿电感的寄生电阻;Cpp为原边并联补偿电容;Cps为原边串联补偿电容;Lp为发射线圈;RLp为发射线圈寄生电阻;Ip为发射线圈电流;Ips为原边输入电流;Ls为接收线圈;RLs为接收线圈寄生电阻;Cs为副边补偿电容;Is为接收线圈电流;RL为补偿网络的等效负载。
系统的输出功率为:
系统的传输效率为:
可以得到系统输出功效指标随负载RL以及互感M的曲面图,如图3 所示。

图3 LCC/S补偿拓扑输出功效指标随负载RL以及互感M的曲面图
由图3(a)可知,在确定互感M下,LCC/S 补偿拓扑存在最优的负载值RL_Popt使输出功率达到最高,RL_Popt较小可以近似认为LCC/S 补偿拓扑输出功率随负载RL的增大而减小;在确定负载RL下,LCC/S 补偿拓扑存在最优的互感值MPopt使输出功率达到最高,MPopt较大可以近似认为LCC/S 补偿拓扑输出功率随互感M的增大而增大。由图3(b)可知,在确定互感M下,LCC/S 补偿拓扑存在最优的负载值RL_ηopt使传输效率达到最高;在确定负载RL下,LCC/S 补偿拓扑存在最优的互感值Mηopt使传输效率达到最高。
因此,对于LCC/S 补偿拓扑的系统,为了实现电能的高效无线传输,需要协同设计补偿电路参数以及磁耦合机构参数。
1.2 DC 变换器
常用的DC 变换器拓扑包括以Buck 电路为代表的降压电路、以Boost 电路为代表的升压电路以及以Buck-Boost 为代表的升降压电路三种电路拓扑。其中,Buck 电路具有降压以及阻抗放大的特性,Boost电路具有升压以及阻抗衰减特性,Buck-Boost 结合了前两者的优势,具有全范围升降压以及阻抗变换特性[8],具有更强的调节能力。考虑到宇航空间环境的复杂性,且对无线充电系统的抗偏移性能要求较高,因此需要选用调节能力更强的四开关Buck-Boost 电路,其电路拓扑结构如图4 所示。
由图4 可知,当开关管Q7常开通、Q8常关断时,通过交替开通关断开关管Q5以及Q6,电路工作在降压模式;当开关管Q5常开通、Q6常关断时,通过交替开通关断开关管Q7以及Q8,电路工作在升压模式。
基于上述分析,建立的空间无人作业车无线充电系统的电路拓扑结构如图5 所示。
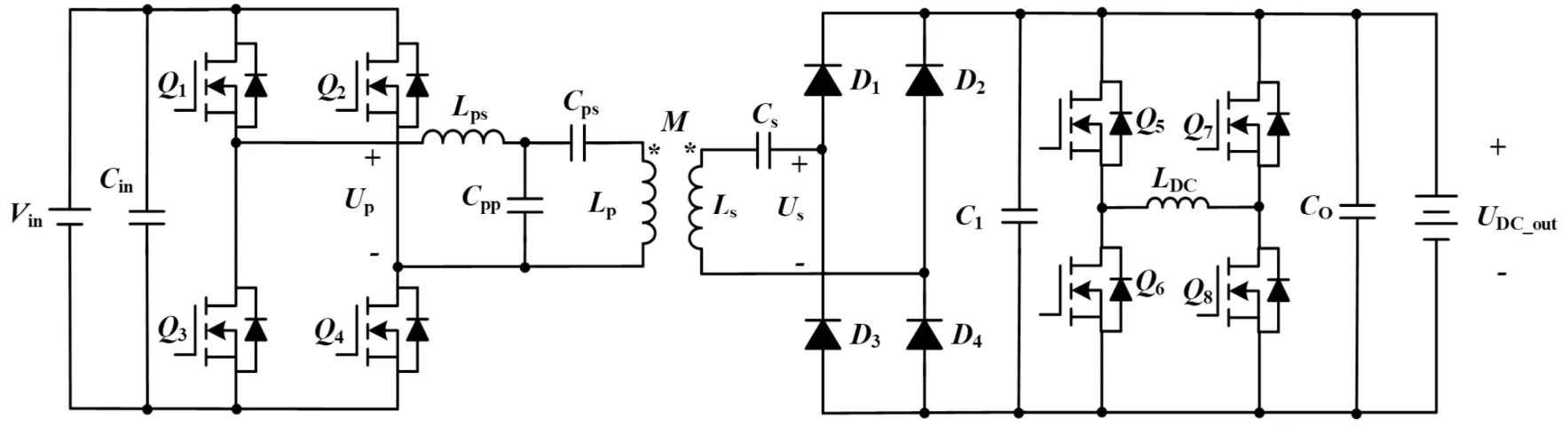
图5 空间无人作业车无线充电系统电路拓扑图
2 系统控制策略
已建立的空间无人作业车无线充电系统电路拓扑结构保障了无线供电的可靠性,为确保无线供电的质量,本文还提出了一种调节范围宽、鲁棒性强的双边控制策略。
2.1 传统控制方法
无线电能传输系统传统的控制方式主要分为原边控制、副边控制以及双边控制三类控制方法,其特点如表1 所示[9]。

表1 三种传统控制方式的特点
考虑到空间无人作业车无线充电系统对性能的要求较高,且系统相关运行参数需要实时遥测,因此双边控制方式更适合于空间无人作业车无线充电系统。
2.2 本文所提控制方法
为了降低通信延时对系统控制鲁棒性的影响,本文提出了一种副边DC 主调节、原边逆变移相次调节的双边控制方式,即副边DC 电路实现输出恒流恒压的高精度控制,原边逆变电路根据接收侧反馈的接收整流电压控制移相角,从而实现系统高控制精度、宽调节范围、高运行可靠的无线充电。
原边移相次调节控制方式的逆变驱动波形如图6 所示,VT1~VT4分别为开关管Q1~Q4的驱动信号,占空比均为49%,定义VT2驱动信号落后于VT1驱动信号的相角为θ。由图6 可以看出,θ 角越大逆变输出电压UP的正负脉冲宽度越小,即原边移相控制通过控制θ 角可以控制逆变输出电压UP的有效值,从而达到调节接收端整流输出电压的目的。

图6 移相控制开关管驱动信号和逆变输出电压波形
副边DC 主调节控制方式采用平均电流控制算法,无需额外的电流保护电路,且具有宽范围输入输出等特点。其通过检测输入输出电压来控制开关管调制信号,进而控制变换器工作模式,实现电路在Buck、Buck-Boost、Boost 三种模式下的平滑切换。
基于上述分析,本文提出的原边移相、副边DC闭环的控制方式对通信速率、通信延迟以及原边逆变器调节能力的要求较低,降低了系统的设计难度,且系统控制响应速度快,环路稳定性高,适用于复杂的宇航空间环境。
3 实验验证
为了验证本文所提控制方式的可行性,研制了如图7 所示的空间无人作业车无线充电样机,系统输入电压为56 V,工作频率为85 kHz,输出恒压恒流指标为22 V/5 A。
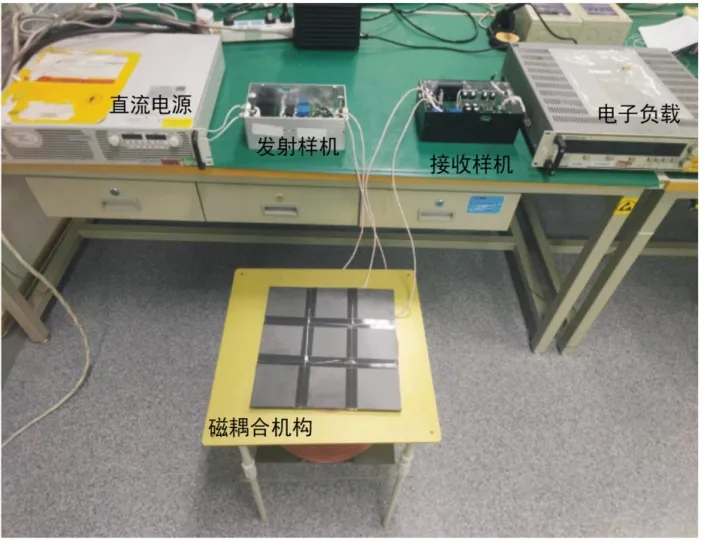
图7 空间无人作业车无线充电样机
当收发线圈传输距离为6.5 cm 且保持正对时,系统发射侧逆变器的输出电压电流以及接收侧整流输入电压电流波形如图8 所示。此时,接收侧整流输出电压远大于系统的输出电压,系统通过增大发射侧逆变电路的移相角,降低接收侧整流输出电压,后级Buck-Boost 电路工作于降压模式,实验波形如图9(a)所示。当收发线圈之间的偏移距离达到9.5 cm时,接收侧整流输出电压远小于系统的输出电压,系统通过降低发射侧逆变电路的移相角,增加接收侧整流输出电压,后级Buck-Boost 电路工作于升压模式,实验波形如图9(b)所示。
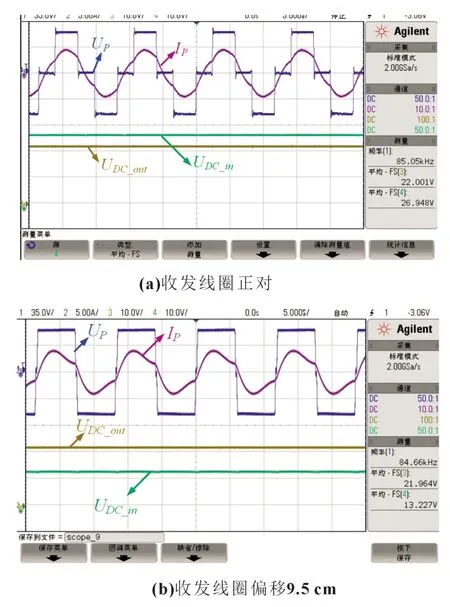
图9 不同偏移情况下的实验波形
实验结果表明,样机在6.5 cm 传输距离的条件下,实现了22 V/5 A 的恒压恒流充电,系统最大传输效率达到88%,验证了方案设计的可行性。
4 结论
基于空间无人作业车的应用背景,本文得到了LCC/S 补偿拓扑以及Buck-Boost 级联拓扑结构更适合应用于空间无人作业车无线充电系统。提出了一种副边DC 主调节、原边逆变移相次调节的双边控制方式,该方案对通信速率、通信延迟以及原边逆变桥调节能力的要求较低,且控制系统的响应速度快,控制环路稳定性高,适用于复杂的宇航空间环境。搭建了样机,按照22 V/5 A 的充电曲线,在6.5 cm 传输距离条件下,实现了88%传输效率以及9.5 cm 偏移距离的无线电能传输,验证了设计方案的有效性,为将来成功建立月球科研站无线充电系统提供了设计参考。
猜你喜欢
大电机技术(2022年4期)2022-08-30
中国特种设备安全(2021年5期)2021-11-06
山东冶金(2019年5期)2019-11-16
模具制造(2019年7期)2019-09-25
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
人生十六七(2016年14期)2016-12-01
现代农业(2015年1期)2015-02-28
