
行星、卫星探测器用移动供电平台电源系统技术研究
2024-04-12 07:13马力君童乔凌李智铮卢嘉承宋相毅
电源技术 2024年3期
马力君,张 明,童乔凌,李智铮,卢嘉承,宋相毅,赵 健
(1.中电科蓝天科技股份有限公司,天津 300384;2.北京空间飞行器总体设计部,北京 100094;3.武汉理工大学自动化学院,湖北武汉 430070)
我国探月工程四期的总目标是在2030 年前后研制建设月球科研站基本型,为国际月球科研站选址和初步建设提供支撑[1]。
由于月球表面是真空状态,月球科研站的各项勘察、建设、科学探测等工作离不开各类轮系、脚系及混合系统的车器机器人等月面可移动的运输和操作工具的保障支持。
本文调研国外月球表面及火星表面的移动平台电源系统技术,开展移动供电平台电源系统方案论证,对能源系统的功能、工作原理和工作模式进行分析,对技术途径进行初步探讨,并针对后续工作给出建议。
1 移动供电平台电源系统任务需求分析
1.1 移动平台功能需求
移动平台一:可移动能源补给车/器。
月面能源补给车/器的主要功能是给远离驻留区外的移动操作车补充能量,或者应对其它突发事故进行紧急救援,其电源系统需求具备大容量能量贮存能力,即具有较大的能量密度[2]。
移动平台二:可移动作业车/器/机器人。
月面移动作业车主要功能是在距离驻留一定距离外,完成巡视、勘探及其它月面科研任务。它既可以全时候、全地形连续工作,也可以在特定时间段内间歇工作。由于需求其电源系统能长时间提供不间断电源,故需具备较低的能耗。
1.2 移动供电平台电源系统应用场景分析
移动平台在月球科研站的应用主要包括两类,即可移动能源补给车/器和可移动作业车/器/机器人。
两类移动平台的工作任务差异导致其电源系统设计目标也完全不同,其中能源补给车需要提供更多能源,而移动操作车需要尽可能长时间不间断作业。
表1 为移动供电平台任务差异表。
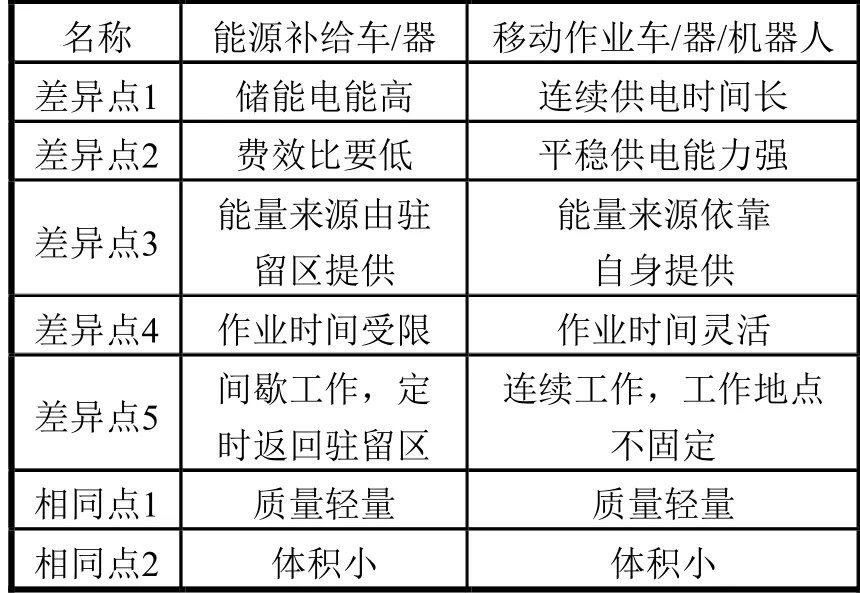
表1 移动供电平台任务差异表
能源补给车/器的任务是给移动操作车/器/机器人进行能源补给,即两者之间需要进行能源传输。为了能够满足月球科研站任务实际场景应用需求,实现全浸式的技术场景演示,需要开展能源补给车和移动操作车之间的交互验证。
1.3 移动供电平台初步指标能力体系分析
可移动能源补给车/器指标能力体系:
(1) 供电补给能力:能源补给车/器的核心指标,决定是否具有移动能源补给的前提条件,采用比能量指标,单位Wh/kg。
(2) 储能类型:能源补给车/器的能源类型,可以是光伏电源、燃料电源、蓄电池、温差电池等,该类型可以根据贮能技术的发展而进行迭代。
(3)续航时间能力(t0):指能源补给车/器的续航能力,以一定的速度可以连续工作的时间,续航里程=额定速度×t0,单位为h,该指标与速度、路况、载重等因素相关。
(4)作业时段能力:衡量能源补给车/器可出勤工作的时段能力,表明其可在月昼工作、月夜工作,或者不受月昼月夜都可以全时段出勤工作,无单位,分别采用tLd,tLn,tLa符号来表示。
(5)能量补给能力:指能源补给车/器所携带的可用于给外部补给的总电能,单位为kWh。
(6) 最快补给时间(tmin):指能源补给车/器给补给对象储能单元完成充电所需要的最短时间,单位为h,该指标与补给对象所携带储能单元的容量、能量补给车输出功率、线路及环境温度等因素相关。
(7)补给方式能力:指能源补给车/器给补给对象提供可充电接口的能力,包括有线接口、近场无线接口、远场无线接口等形式,无单位。
移动作业车/器/机器人指标能力体系:
(1) 任务支承能力:移动作业车的重要指标,决定着移动作业车/器/机器人的任务工作支承能力,采用的单位为比能量单位Wh/kg。
(2) 储能类型:能源补给车/器的能源类型,可以是光伏电源、燃料电源、蓄电池、温差电池等,该类型可以根据贮能技术的发展而进行迭代。
(3) 灵活移动能力:指移动作业车在各种地形、各种时间段以不同速度完成不同任务时的机动能力,无单位。
(4) 连续作业时间能力:指移动作业车可以连续完成设定任务的能力,单位为h,该指标受移动作业车所携带的能源、工作环境等因素影响。
(5) 可灵活接收外部供能力:指移动作业车接收可充电接口的能力,包括有线接口、近场无线接口、远场无线接口等形式,无单位。
图1 为移动供电平台指标能力体系图。
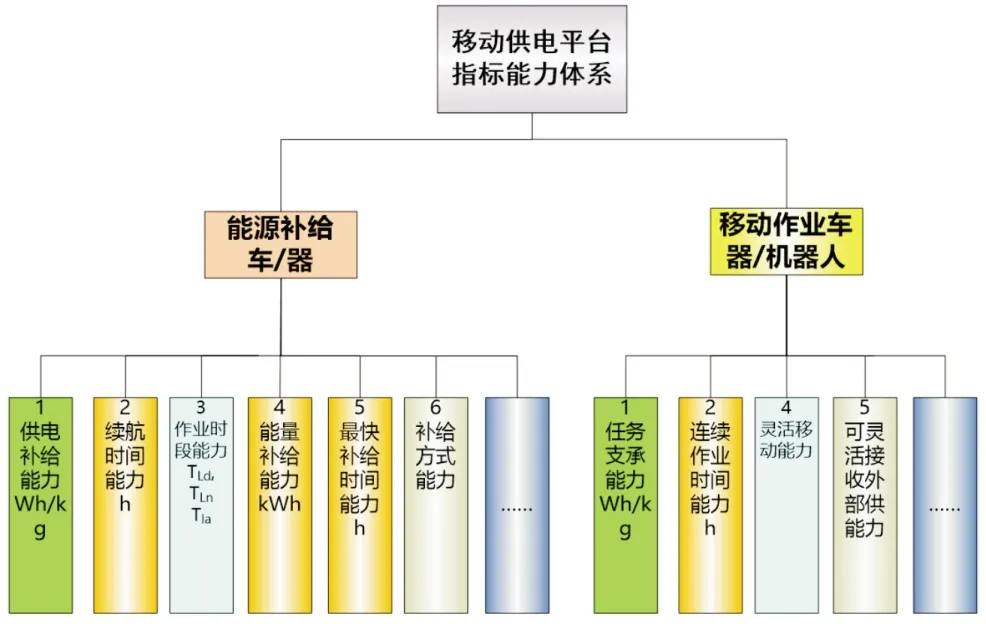
图1 移动供电平台指标能力体系图
2 移动供电平台电源系统方案设计
2.1 国内外技术研究进展
(1)国外研究进展
Lunokhod1 是历史上第一辆月球探测车(图2),由前苏联研制,质量约756 kg,长约2.94 m,宽约1.96 m。车体结构分为两部分:上部分是仪器舱,下部分是自动行走底盘。仪器舱是由镁合金制成的密封舱,保证仪表在月面工作时不受月面环境的影响。舱内装有无线电接收和发送设备、遥控仪器、供电系统、温度控制系统以及各种科学仪器的电子部分,还载有四台全景摄像机;自动行走底盘下装有8 组驱动轮。Lunokhod1 的主要工作模式是地面遥控操作,地面工作小组根据图像来控制月球车。由于当时微电子技术的限制,其运动控制系统很简单,只有1 和2 km/h两个速度档。
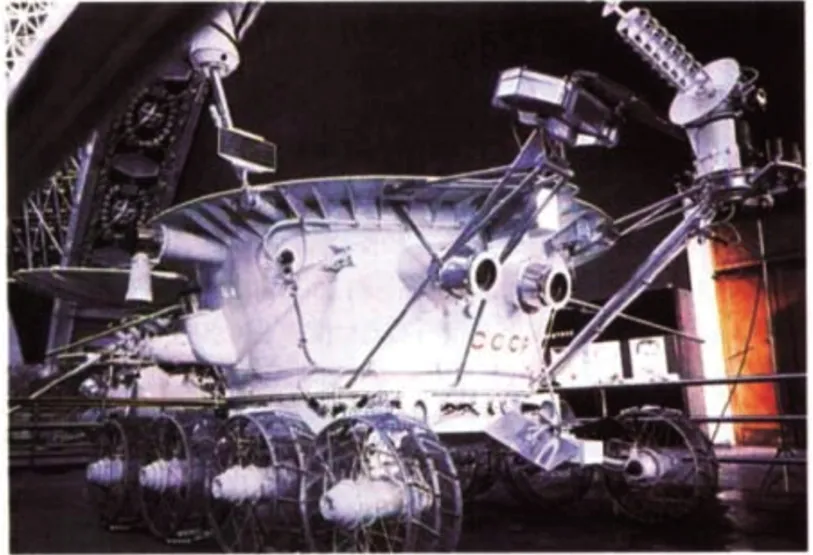
图2 Lunokhod1月球探测车
Sojourner 火星探测车(图3)由美国喷气推进实验室(JPL)研制[3],于1997 年由“Mars Pathfinder”(火星探路者)号飞船携带,Sojourner 采用摇臂-转向架结构,六轮独立驱动,前后四轮转向。每个驱动轮装有一个驱动电机,每个角轮装有一个转向电机。Sojourner 质量约11.5 kg,长为630 mm,宽480 mm,车轮直径为13 cm,其上装有不锈钢防滑齿。Sojourner可在各种复杂的地形中行驶,特别是软沙地。车的前后都有独立的转向机构,其最大速度为0.4 m/min。探测车由一个0.2 m 的砷化镓太阳电池供电,共有13(行)×18 个电池片,每个电池片的尺寸为2 cm×4 cm。对于火星探路者着陆器,其正午在着陆点北纬19.5°的位置,太阳电池产生的峰值功率约15 W。漫游车装有9 个Li/SOCl2蓄电池,可提供300 Wh 的电能。
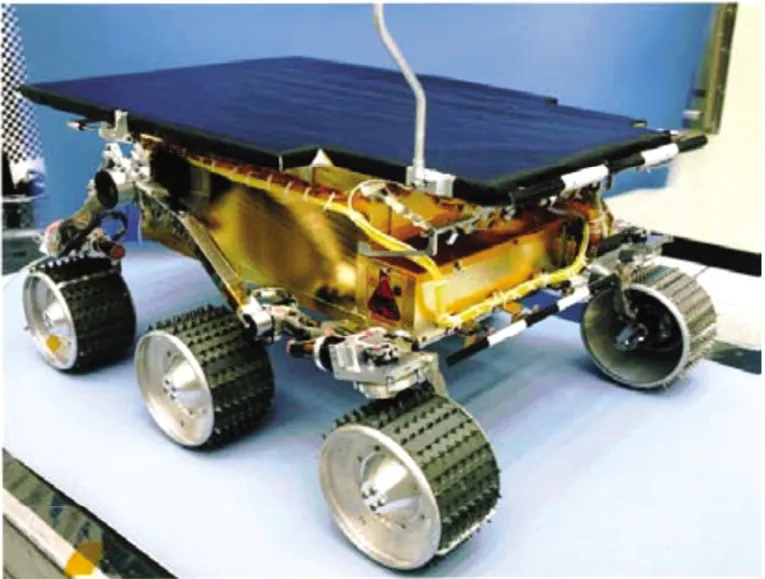
图3 Sojourner 火星探测车
2004 年登陆火星的Spirit(勇气号)与Opportunity(机遇号)火星探测车两者结构相同,与Sojourner 结构类似,Spirit 六轮独立驱动,前后四轮具有转向功能。电机控制采用PWM 伺服控制,控制方式为速度控制。驱动电机安装有编码器,用于测量车轮的行驶里程;转向电机装有编码器和电位计,用于测量转向实际角度;其它传感器的安装也和Sojourner 类似。
2022 年3 月份,丰田曾宣布与日本宇宙航空研究机构(JAXA)联手开发未来能够在月球上运动的燃料电池六轮月球车。这款月球车正式定名“Lunar Cruiser”[4](图4)。与之前被美国带上月球的月球车不一样,丰田Lunar Cruiser 是一款标准定义的工程车,必须具备反复使用,质量可靠等功能。Lunar Cruise 的车身长度超过6 m,内部空间约13 m2,可搭载两名宇航员,紧急情况下可容纳4 人。该车将搭载使用燃料电池和太阳电池板组成的复合能源系统,并采用电力驱动,续航最大可达到约16 000 km。

图4 Lunar Cruiser 月球车
表2 为Lunar Cruiser 主要指标。

表2 Lunar Cruiser主要指标
(2)国内研究进展
2018 年“嫦娥四号”着陆于月球背面艾特肯盆地区域,实现了人类历史上首次月背软着陆,并释放了“玉兔二号”月面巡视器进行巡视探测。2020 年,“嫦娥五号”实现了我国首次月球表面采样返回,为我国后续载人航天活动进行了技术积淀。2021 年,“天问一号”探测器成功抵达环火轨道,在停泊轨道上经过了3 个月的探测,于2021 年5 月15 日进入舱与环绕器分离、着陆。2021 年5 月25 日,“祝融号”火星车从着陆平台沿梯子驶下着陆平台到达火星表面展开巡视探测,这标志着我国成为全球第一个在首次火星任务中圆满完成“绕、落、巡”的国家。目前“嫦娥四号”已完成初样产品研制,移动供电平台采用体制是太阳阵与蓄电池组的传统方案,月面最大移动供电平台功率在1 200 W 左右,最小移动供电平台功率在300 W 左右。
(3)发展趋势分析
目前国内外对于移动供电平台指标体系没有具体的报道,但从移动平台的任务背景需求,需要移动供电平台具有一定范围的移动能力、一定时段的工作能力、适应一定地形的作业能力,同时还要具有灵活的供电能力,及不受地形限制的能源补给能力。
2.2 移动供电平台电源系统拓扑分析
(1)可移动能源补给车/器电源系统拓扑
针对月面移动能源补给的任务需要,移动能源补给车/器能源系统拓扑要满足后续月面科研、探测等的移动作业单元或远离基地的固定单元提供灵活的能源补给需求。系统拓扑要具有接口通用性强,使用方便、接口方便灵活、兼容性强的特点,可匹配月球、火星及其它类似的深空任务的能源补给场合需求。
移动能源补给电源系统包括发电单元、储能单元、电源控制及配电管理器、无线传能单元(可选配)及其它形式的供电接口单元构成。
(2)可移动作业车/器/机器人电源系统拓扑
针对月面多任务、不同场景下的可移动作业任务需要,可移动作业车/器/机器人电源系统拓扑技术要满足月面科研、探测等各种任务场景下可移动作业车/器/机器人供电需求,系统拓扑要具有接口简便、受电灵活、适应力强的特点。
可移动作业车/器/机器人电源系统包括发电单元(可选配)、储能单元、电源控制及配电管理器、无线受能单元(可选配)及其它形式的供电接口单元构成。
2.3 移动供电平台电源系统主要性能指标
2.3.1 可移动能源补给车/器
根据能源补给车的能力体系指标需求,并鉴于无以前指标可参考,初步定义能源补给车的续航时间为48 h,作业时段为tLa,比能量不小于300 W/kg,由于作业时间不受月昼月夜影响可全时段工作,能源补给车要具有供电及保热能力,对目前典型的月面移动目标可在1 h 完成能源补给,同时要具有无线充电能力。
能源补给车/器技术要求如下:(1)供电补给能力≥48 kWh;(2)续航时间48 h;(3)作业时段tla;(4)能量补给比能量≥300 W/kg;(5)能源补给车要具有供电及保热能力;(6)最快补给时间≤1 h;(7)最大补给功率≥1 000W;(8)补给方式能力:无线传能能力。
2.3.2 可移动作业车/器/机器人
根据移动作业车/器/机器人的能力体系指标需求,结合当下及后续工程应用需求,初步定义移动作业车/器/机器人的贮能单元比能量不小于200 W/kg,为了提升连续作业能力和灵活移动能力,为系统配置无线接收能力。
作业车/器/机器人技术要求如下:(1)贮能单元比能量≥200 W/kg;(2)具备近场无线接收功能。
3 地面演示验证样机设计
3.1 地面验证演示指标
3.1.1 能源补给车电源系统指标
受地面演示验证场地的大小制约因素影响,同时考虑时间进度、经费等因素制约,地面演示中的能源补给车的续航时间为30 min,作业时段为tLa,作业时间不受月昼月夜影响可全时段工作,能源补给车要具有供电及保热能力,同时要具有远场无线充电能力。
3.1.2 移动作业车电源系统指标
同样结合考虑地面演示面积的大小和时间进度制约因素影响,结合目前已有的成熟技术解决方案,为了增加连续作业能力和灵活移动能力,为移动作业车系统配置近场能量接收能力和远场接收能力。
3.2 移动供电平台电源系统设计
能源补给车及移动作业车电源系统设计采用不调节母线系统设计,以储能动力蓄电池输出作为一次母线输出,完成对车上设备和车上的动力提供电能(图5)。系统配置如表3 所示。

图5 能源补给及移动作业车模型图
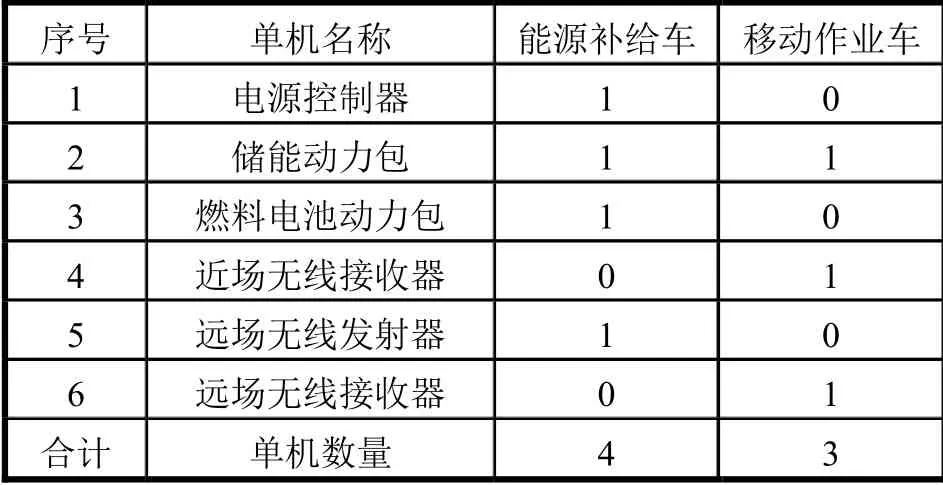
表3 移动平台单机配置表
3.3 主要组成模块
能源补给车电源系统主要由燃料电池包、储能包、电源控制器及远场无线发射器等模块组成。移动作业车电源系统主要由储能包、近场无线接收器及远场无线接收器等模块组成。移动供电平台系统组成框图见图6 所示。
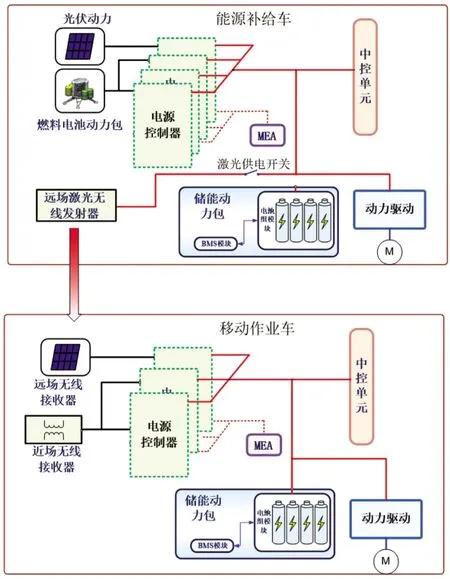
图6 移动平台电源系统组成框图
3.4 能源补给车电源系统设计
能源补给车电源系统负责对移动动力部分的供电,同时完成对移动作业车的能量补充功能。
3.4.1 燃料电池包模块
燃料电池模块是能源补给车的主能源,能源补给车的能源主要由燃料电池包模块负责(图7)。其主要技术指标如下:(1)类型为PEM 燃料电池;(2)燃料为H2-O2;(3)额定功率为1 000 W;(4)工作时间为1 h。
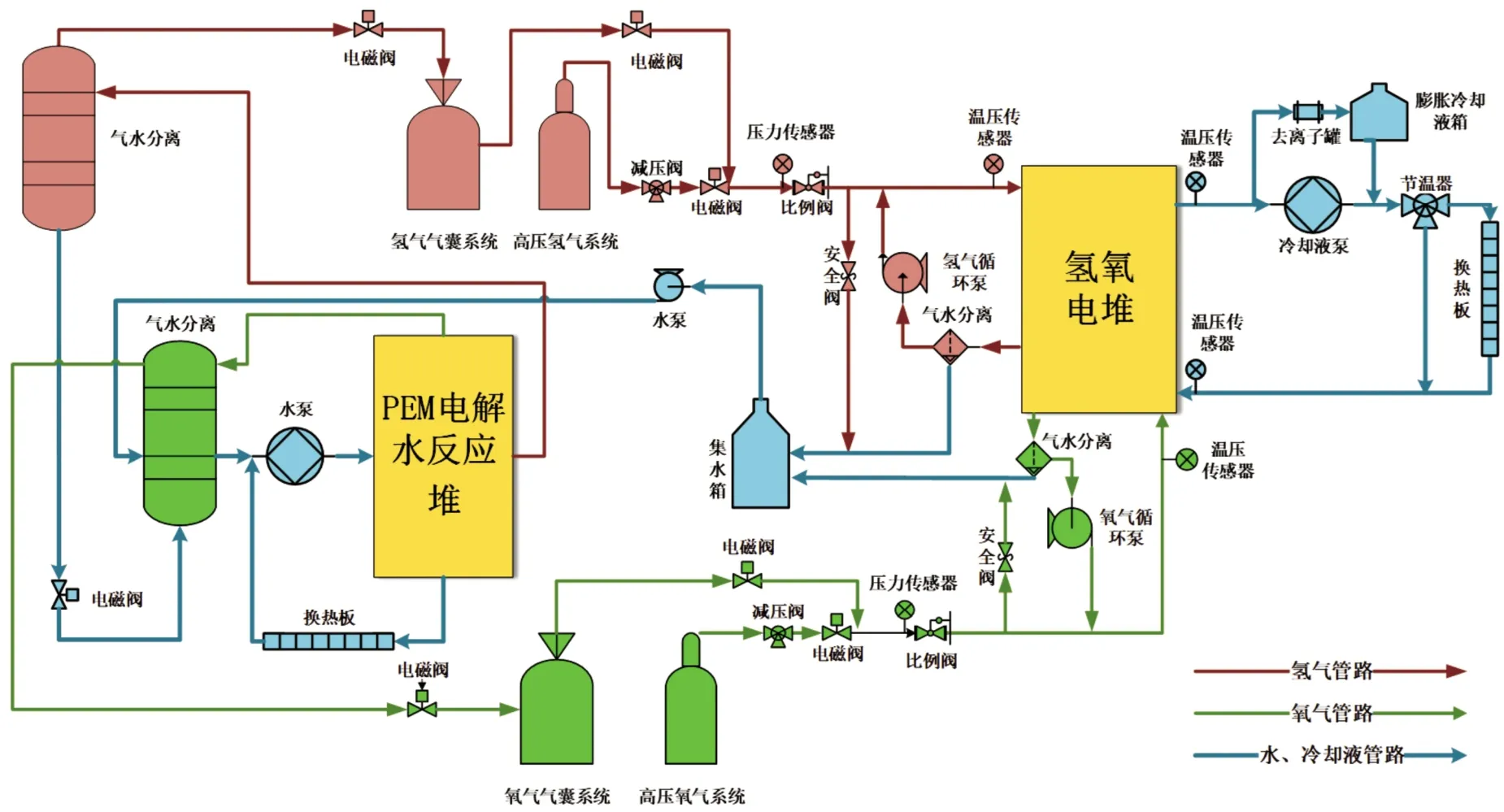
图7 燃料电池结构图
3.4.2 储能包模块
储能包模块是能源补给车的辅助能源,负责提供瞬时峰值功率,并为燃料电池的初始启动提供能源。其主要技术指标如下:(1)容量≥50 Ah;(2)电池组电压为40~60 V;(3)能量≥1.5 kWh;(4)电池充放电倍率≥1C,并能够进行5C大倍率脉冲放电。
3.4.3 电源控制器模块
电源控制器模块完成燃料电池和锂离子电池组的功率调节分配,生成一次调节母线,完成整个电源系统内部参数遥测和对外遥控指令的执行功能。其主要技术指标如下:(1)母线输出电压:40~60 V;(2)功率不低于1 kW;(3)可调整的能源类型:燃料电池和蓄电池。
3.4.4 远场无线发射器
远场无线接收器模块负责将远方传递的能量变换并存贮到移动作业车的储能包中,以满足本地后续用电需求。
3.5 移动作业车电源系统设计
移动作业车电源系统负责对移动装置提供动力,同时满足移动作业车其它负载的用电需求。
3.5.1 近场无线接收器模块
近场无线接收器模块负载接入外部的驻留区或其它能源补给,并将接入的能源高效变换并存贮到移动作业车的储能包中,以满足本地后续用电需求。其主要技术指标如下:(1)接收功率不低于1 kW;(2)距离不小于10 cm;(3)接收端输出电压为48~60 V。
3.5.2 储能包模块
储能包模块是能源补给车的辅助能源,负责提供瞬时峰值功率,并为燃料电池的初始启动提供能源。其主要技术指标如下:(1)容量≥50 Ah;(2)电池组电压为40~60 V;(3)电池充放电倍率≥1C,并能够进行5C大倍率脉冲放电。
3.5.3 远场无线接收器模块
远场无线接收器模块负责将远方传递的能量变换并存贮到移动作业车的储能包中,以满足本地后续用电需求。
4 地面演示验证
通过对行星、卫星探测器用两类移动供电平台样车研制,通过能源补给车[图8(a)]与移动作业车[图8(b)]多场景、交互式、多工况的能源交互演示验证,为后续月面真实环境的应用提供前期验证及在轨策略方案预订提供依据。

图8 能源补给车和移动作业车产品照片
5 结论
通过对行星、卫星探测器用的两类应用场景需求进行了梳理,针对两大类型的移动供电平台不同任务特点、工作模块、供电特点进行了较全面分析,并首次提出两大类移动供电平台的指标体系,通过研制两大类的典型样机,并经过多场景、全工况、交互浸入式的全实物物理演示验证,为后续对行星、卫星探测器用工程应用打下了坚实的基础。
猜你喜欢
煤气与热力(2021年6期)2021-07-28
无线互联科技(2021年4期)2021-04-21
阅读(快乐英语高年级)(2019年2期)2019-09-10
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
通信电源技术(2018年3期)2018-06-26
能源(2017年12期)2018-01-31
电子制作(2016年15期)2017-01-15
消费者报道(2016年3期)2016-02-28
电源技术(2016年2期)2016-02-27
