借用对向车道通行的高速公路施工控制区 梯级限速研究
2024-04-11 17:23吕路丁天郭忠印侯福金
华东交通大学学报 2024年1期
吕路 丁天 郭忠印 侯福金

摘要:【目的】為使车辆平稳快速地通过借用对向车道通行的高速公路施工控制区,对施工控制区梯级限速方案进行了研究。【方法】首先,采集并分析不同施工控制区断面交通流速和车头时距变化;其次,根据车辆轨迹特征计算末级限速值,基于车辆减速运动特征和驾驶人注视特点制定施工控制区梯级限速方案;最后,构建驾驶模拟实验场景,通过安全与效率协调优化的评价指标对所建立的限速方案进行评价。【结果】结果表明:中分带开口区平均车速和车头时距最小。当中分带开口长度为70 m的两车道时,形成以40 km/h为最终限速值、以20 km/h为降速幅值、以过渡区起点上游50 m为最终限速标志位置的变间距高速公路施工控制区限速系统。【结论】驾驶模拟实验表明,同《公路养护安全作业规程》(JTG H30—2015)中的两级限速方案相比,所建立的梯级限速方案可使施工控制区综合效率指数提高9.15%,综合安全指数提高27.62%。
关键词:高速公路施工控制区;借用对向车道通行;交通特性;安全与效率;限速
中图分类号:U491.4 文献标志码:A
本文引用格式:吕路,丁天,郭忠印,等. 借用对向车道通行的高速公路施工控制区梯级限速研究[J]. 华东交通大学学报,2024,41(1):1-10.
Study on Graded Speed Limit in Work Zone Crossovers for Expressway Construction
Lyu Lu1, Ding Tian2, Guo Zhongyin1, Hou Fujin3
(1. Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China;
2. College of Railway Transportation, Shaanxi Railway Institute, Weinan 714000, China;
3. Shandong Hi-Speed Construction Management Group Co., Ltd., Jinan 250014, China)
Abstract: 【Objective】To ensure the vehicles through the work zone crossovers for expressway construction smooth and fast, a graded speed limit plan for the traffic control zone was studied. 【Method】Firstly, collect and analyze the traffic flow velocity and time headway in different traffic control zones. Secondly, according to the vehicle trajectory to calculate the value of the last speed limit sign, and a graded speed limit plan for the traffic control zone was formulated based on vehicle deceleration and driver gaze. Finally, the graded speed limit plan was evaluated by safety and efficiency indictors through driving simulator. 【Result】The results show that the average speed and the time headway in work zone crossovers are the smallest. When the median width is 70 m, the final speed limit value should be 40 km/h, forming a graded speed limit system in expressway construction with a deceleration amplitude of 20 km/h and a final speed limit sign positioned in 50 m before the upstream of the transition area. 【Conclusion】The driving simulation test shows that compared with the two-level speed limit scheme in JTG H30—2015, the comprehensive efficiency index of the traffic control zone under established scheme has increased by 9.15%, and the extensive safety index has increased by 27.62%.
Key words: expressway construction; work zone crossover; traffic characteristics; traffic safety and efficiency; speed limit
Citation format:LYU L, DING T, GUO Z Y, et al. Study on graded speed limit in work zone crossovers for expressway construction[J]. Journal of East China Jiaotong University, 2024, 41(1): 1-10.
【研究意义】借用对向车道通行是高速公路保通施工的一种交通组织方式[1],为了保障施工期间的路网通行安全与效率,需要设置由警告、上游过渡、缓冲、转序、工作、下游过渡和终止等交通管控区组成的施工控制区[2-3]。频繁的交通环境过渡导致施工控制区交通流异质性增加,车速离散性变大,存在交通安全隐患。设置合理的施工控制区限速方案,对维持施工路段的交通运行秩序、保障车辆通行安全具有重要意义[4]。
【研究进展】研究发现,不同交通管控区的交通流运行参数和风险特征不同。在上游过渡区,开放车道与封闭车道上游的车辆合流,导致此区域侧面碰撞事故高发;在工作区,车辆以跟驰行驶为主,引发此区域追尾事故的风险增加;在中分带开口区,车辆为了驶入目标车道需要在短时间和短距离内连续转向,此区域危险驾驶行为集中[5]。现行《公路养护安全作业规程》(JTG H30—2015)中的两级限速方案,不能满足借用对向车道通行时车辆通行环境平稳过渡的应用需要[6],不利于保障行车安全。
现有研究中的限速方案主要包括区间限速[7-9]和梯级限速[10-11]两种。根据各施工控制区车速分布特征,建立以车速统计指标为影响因素的区间限速方案,具有简便易行的特点,但也存在不能使车辆运行速度平稳变化的问题[12]。作业区梯级限速具有使车辆平稳通过交通环境剧烈变化路段的优势,但在计算最终限速值、各级限速值、末级限速标志位置时[13],应符合施工控制区的交通流特征,当前对此类问题的研究较少。
【创新特色】本文基于实地调查,分析了工作区上下游不同断面的交通流参数,建立了符合施工控制区交通流变化特征的梯级限速方案。【关键问题】通过对车辆减速运动特征和驾驶员注视特点的分析,确定了施工控制区最终限速值、逐级限速的限速标志间隔和降速幅值,基于驾驶模拟实验验证了限速方案的有效性。
1 数据来源与分析
1.1 数据来源
S29滨莱高速淄博枢纽至莱芜枢纽段改扩建工程将原双向四车道高速公路改扩建为双向八车道,项目全长72.678 km。原路基宽度为26 m,中间带宽度为3.5 m,改扩建后路基宽度为42 m,中间带宽度为4.5 m。在S29滨州方向K83+350至K82+350之间,采用半幅封闭施工半幅通车的交通组织方式,中央分隔带开口长度为70 m,导行区共设置两条行车道,施工区限速60 km/h。
分别在施工控制区中的警告区、纵向缓冲区、中分带开口区、施工作业区、终止区中的最外侧车道设置交通调查断面,通过Metro Count 5600气压管式车辆分型统计系统采集车型、车辆速度、车辆通过调查断面的时间等信息,由此得到逐车车速、车头时距等交通流数据,所获得的不同施工控制区车辆数,如表1所示。
1.2 断面交通流运行特征分析
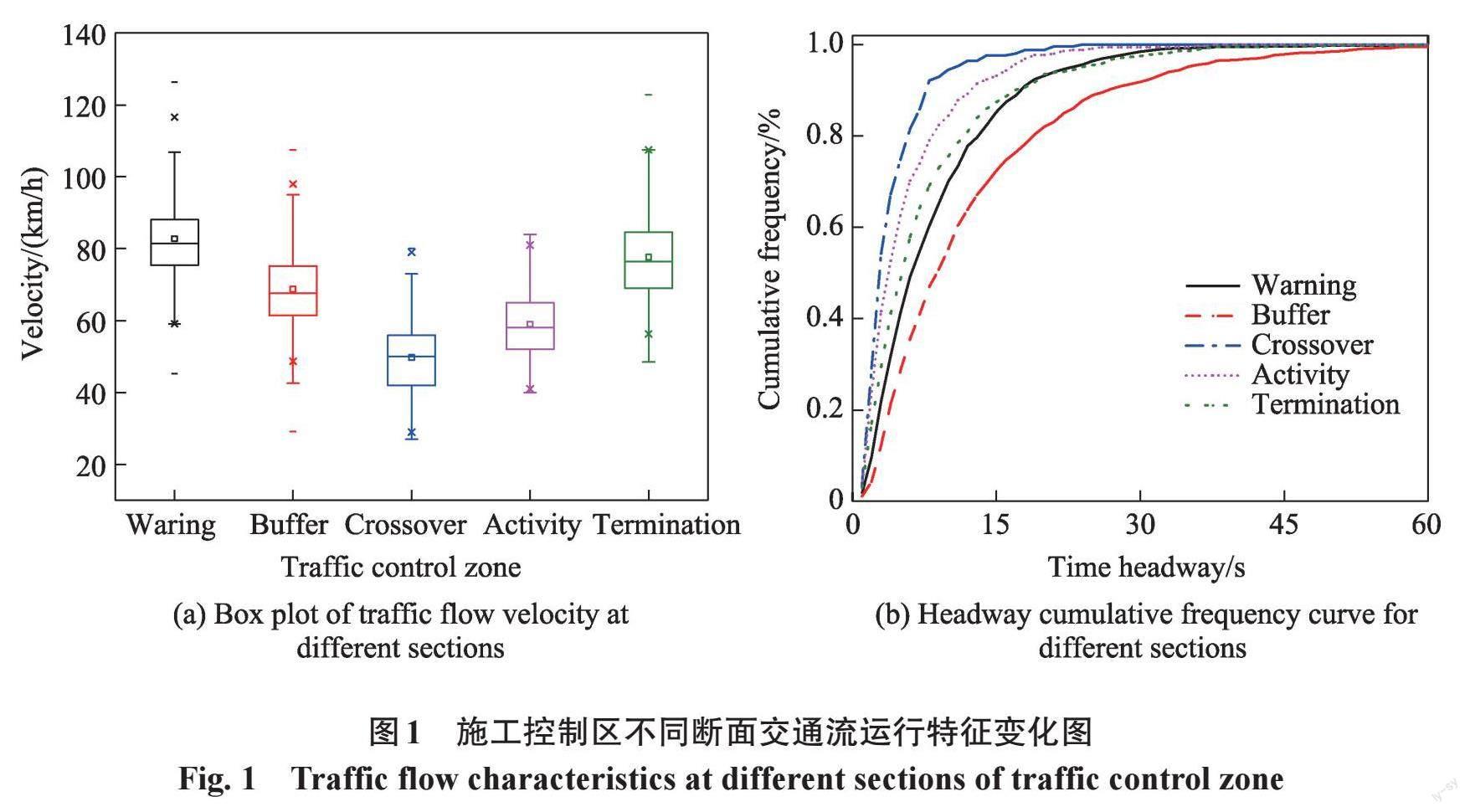
由于警告区、纵向缓冲区、工作区等交通管控区车辆通行环境不同,导致该路段交通流参数也不相同。统计不同断面车辆运行速度、车头时距分布,绘制断面交通流速箱线图和车头时距累积频率曲线图,结果如图1所示。图中显示,车辆在通过施工控制区时,交通流平均流速先降低再增加,中分带开口区内断面交通流速平均值小于60 km/h。各调查断面50%以上的车头时距集中在10 s以内,中分带开口区内车头时距各分位值最小。
平均交通流速越小,道路通行效率越低;车头时距分位值越小,引发追尾事故的行车风险越大。由此可见,在不同施工控制区,中分带开口区内的行车安全水平和路段通行效率最低,且车辆由限制速度为120 km/h的自由行驶区行驶至中分带开口区时,降速幅值较大。因此,应以中分带开口区所允许的车辆通行速度作为施工控制区最终限速值,并制定能使车辆平稳运行的施工控制区限速方案。
在高速公路施工控制区,行车空间压缩,大、小型车混行,分车型限速已经不能满足实际需要,应对施工控制区车辆进行统一限速。根据施工控制区内交通流运行特征,采用梯级限速的施工控制区限速方案,保障车辆平稳运行。车辆驶入对向车道后,受对向车道来车和交通安全设施影响,仍存在较大的行车风险,应根据施工作业区长度,重复设置限速标志,與中分带开口区之前的梯级限速方案,共同构成借用对向车道通行的高速公路施工控制区限速系统。
2 高速公路施工控制区限速方案
2.1 施工控制区最终限速值计算
采用无人机悬停拍摄中分带开口区,基于图像处理技术得到车辆运行轨迹数据。车辆运行轨迹带在中分带开口区内的分布,如图2所示。
图2显示,车辆在中分带开口区内的运行轨迹带可近似为[S]形。选择两条反向相接的圆曲线进行轨迹拟合,得到车辆转向半径[R]与中分带开口长度[L]、中间带宽度[Wc]、导行区宽度[Wn]的关系[14],如
根据车辆转向时的受力状态以及各种力的几何关系,推导出车辆速度与圆曲线半径、横向力系数、道路横坡坡度的关系,结果如
式中:[V]为车辆速度,km/h;[μ]为横向力系数;[i]为路拱横坡;[R]为圆曲线半径,m;调查路段中间带宽度[Wc]为4.5 m,导行区共设置两条行车道,即[Wn]为7.5 m;驶入对向车道过程中路拱横坡[i]为2%。根据《公路工程技术标准》(JTG B01—2014),高速公路设计速度越高,设计用的横向力系数越小。由圆曲线最小半径计算结果,不同开口长度下的设计横向力系数在(0.12~0.16)之间取值。综合式(1)和式(2),得到不同中央分隔带开口长度与车辆速度之间的关系,结果如表2所示。
由表2可知,当中央分隔带开口长度为70 m时,计算得到车辆速度为46.21 km/h。为了保障车辆通行安全,按照《公路限速标志设计规范》(JTG/T 338102—2020)高速公路限速值应为10 km/h的整数倍的规定,得到施工控制区最终限速值应为40 km/h。
2.2 梯级限速标志设置方案
2.2.1 限速标志视认及车辆减速过程
道路交通标志的可视认性受光照环境影响较大。前文施工控制区交通调查均在光照良好的条件下进行,为了减少理论分析与现场调查变量差异对施工控制区交通运行状态产生的影响,以下所进行的施工控制区限速标志设置方案研究,均以光照充足为前提条件。驾驶员操纵车辆通过限速区的过程,可分为对限速标志的视认和操纵车辆减速两个相互依存的事件,具体过程如图3所示。
由图3可知,车辆通过限速标志影响区的关键节点包括:当车辆行驶至A点时,驾驶员发现位于D点的限速标志并开始视认,直至C点视认完成。在标志视认过程中,驾驶员在B点采取制动减速措施。随着车辆的行驶,标志在E点从驾驶员的视野中消失,车速在[D]处降至限定值以下。图3中,[LAB]为驾驶员的制动反应距离,m;[LBD]是车辆的制动行驶距离,m;两者共同构成车辆的制动减速过程。
驾驶员的视野在车辆运动过程中发生变化,[LAE]为从驾驶员发现限速标志起至限速标志在视野内消失的距离,m;[LED]为标志从视野内消失至实际标志设置点之间的距离,m。同时,为确保车辆在某个特定位置将车速控制在限定值以下,应将限速标志前移,标志前移距离为[LDD],m。标志可供视认的距离,标志消失距离和标志前移距离三者共同构成驾驶员对限速标志的视认过程。
[LAD]为驾驶员对限速标志的初始视觉识别距离,m。为了确保驾驶员能够在特定位置将车速控制在限定值以下,车辆制动减速距离应小于驾驶员对限速标志的初始视觉识别距离。即
根据车辆通过限速标志时的运动状态,建立制动反应距离、制动行驶距离、标志阅读距离以及标志视认距离与车辆速度、位置、驾驶员制动反应时间和标志视认时间之间的关系模型,即可推导各级限速标志的限定值。
在进行限速标志间隔计算时,假设第i与第i+1个限速标志之间的距离为[li],车辆需要在G点将车速控制至在第i个限速标志的限定值以下,则两个限速标志之间的距离计算方法如
式中:[Hi]为第i个限速标志的前移距离[LDD];[Ji+1]为第i+1个限速标志的初始视觉识别距离[LAD]。第i与第i+1个限速标志之间的距离计算图解,如图4所示。
2.2.2 梯级限速标志限速值及标志间隔
通过计算式(3)和式(4)中与距离有关的变量,可确定梯级限速标志设置方案中各级限速标志限速值和标志设置位置。假设车辆初始速度为[Vi-1],制动末速度为[Vi];制动反应时间为[t1],此处取2 s;制动减速度为[g f],g为重力加速度。车辆行驶速度V不同,其与路面之间的摩擦系数[f]不同,导致[g f]也不同。V,f两者之间的关系,见表3。车辆在制动减速过程中的行驶距离计算方法如
驾驶员对限速标志的视认过程中,标志视认与标志消失过程的图解,如图5所示。图中[LCD]指标志视认完成点C至标志所在平面的纵向距离;[LED]指标志消失点E至标志所在平面的纵向距离。以驾驶员为中心,当驾驶员视野宽度为[α]时,标志视认完成点C、标志消失点E至限速标志所在平面的纵向距离分别为[LCD]和[LED];驾驶员正前方视线与标志所在平面的交点为D,点D至限速标志中心H和标志下边缘点K的距离分别为[LDH]和[LDK];标志视认完成点C、标志消失点E至限速标志中心H和限速标志下边缘点K的距离分别为[LCH]和[LEK],其中[△CDH]和[△EDK]为两个相似的直角三角形;[∠HCD]和[∠KED]均为驾驶员视野宽度α的一半。
标志的初始视觉识别距离[LAD],可通过标志阅读距离[LAC]和标志视认距离[LCD]进行求解,计算方法如
驾驶员对标志的视认时间主要受光照强度、车辆速度、标志颜色影响,当车辆速度大于40 km/h,标志颜色为白-红-黑,光照强度大于500 lx时(即光照良好的白天驾驶工况),驾驶员的视认时间约为1.4~3.1 s[15]。为了保障车辆通行安全,
式(6)中的标志视认时间[t2]取驾驶员对标志视认时间的下限值,即3.1 s。在标志视认完成点,I为驾驶员视线高度与限速标志中心之间的垂直距离,S为驾驶员与限速标志中心之间的横向距离,α为驾驶员视野宽度(与车速有关,取值方法如表3所示[12]);[h1]为限速标志支柱高度,取2.5 m;R为交通标志半径,取0.6 m;[h2]为小客车驾驶员的视线高度,取1.2 m;W为车道宽度,取3.75 m;m为交通标志外边缘与车道边线之间的距离,取4.0 m(限速标志设于路侧净区,标志内边缘距土路肩0.25 m,硬路肩宽为3.0 m,土路肩宽度为0.75 m)。受驾驶员视野变化影响,在最外侧车道行驶车辆的标志视认距离小于内侧车道。为了确保施工区通行安全,以在最外侧车道行驶车辆的标志视认和制动减速过程为依据,进行标志间隔计算。
将式(5)和式(6)代入式(3)中,得到各级限速标志限速值的计算方法,结果如
为了确保驾驶员在标志消失之前能够观察到限速标志,则[LAE=LAB+LBD-LED-LDD≥0],标志前置距离[LDD≤LAB+LBD-LED]。此处的[LBD]应与式(5)中的[LBD]含义相同,均为车辆制动行驶距离,标志前移距离[LDD]的计算方法如
标志消失距离[LED]的计算方法如
在标志消失点,[M]为驾驶员视线高度与限速标志下边缘之间的垂直距离。根据式(4),则限速标志间隔[li=Hi+Ji+1=LAB+LBD-LED+LAC+LCD]。依次代入各變量值,结果如
2.3 施工控制区梯级限速方案
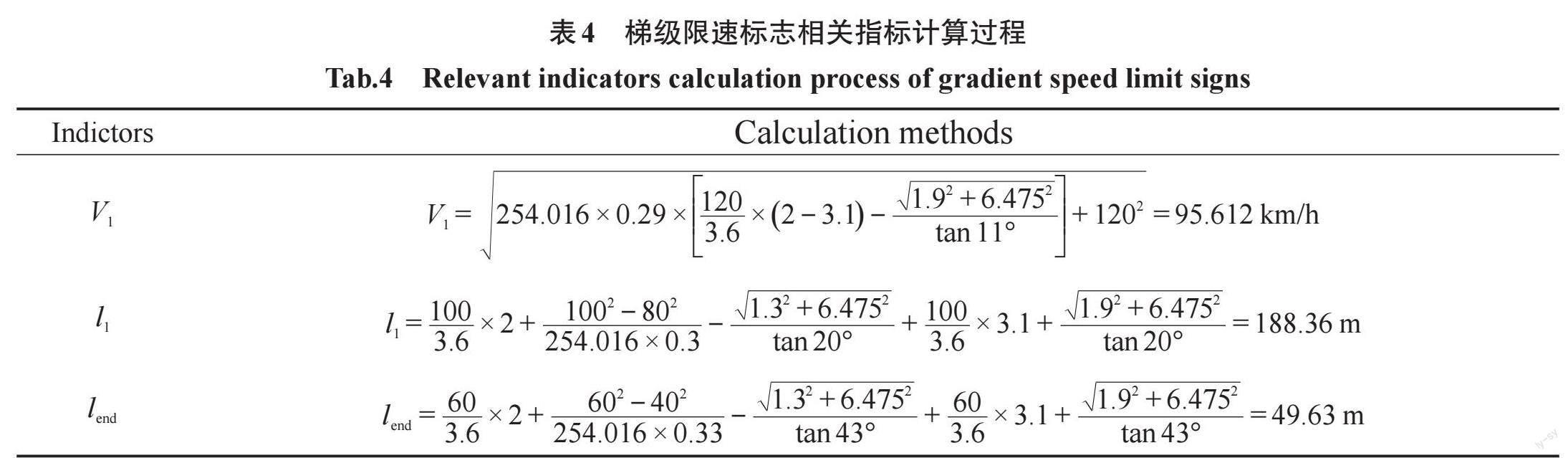
在设计速度为120 km/h,作业区长度为1 km,最终限速值为40 km/h的高速公路施工控制区,按照式(7)计算得到第1个限速标志的限速值[V1]为95.612 km/h,由于公路限速值应为10的整数倍,此处限速值取100 km/h。按照式(10),分别计算得到第1和第2个限速标志的间隔[l1]为189 m,最终限速标志前置距离[lend]为50 m。具体计算过程,如表4所示。
按照表4的计算思路,同理可得,第2个限速标志的限速值[V2]为79.112 km/h,第3个限速标志的限速值[V3]为59.622 km/h,第4个限速标志的限速值[V4]为38.166 km/h,约等于施工控制区最终限速值,所以应建立以100 km/h为初始限速值,以20 km/h为降速幅值的施工控制区四级限速方案。其中,第2和第3个限速标志的间隔[l2]为149 m,第3和第4个限速标志的间隔[l3]为109 m。车辆驶入对向车道后,车速已经得到有效控制,此时限速标志間隔应不小于200 m,本研究按照500 m设置重复提示限速标志。
值得注意的是,虽然中分带开口区是施工控制区中安全与效率最低的区域,但为了保障封闭车道上游车辆顺利驶入开放车道,本研究将梯级限速的末级限速标志设置在上游过渡区起点之前。由此形成在施工控制区中的警告区内设置梯级限速标志,在对向车道设置重复提示限速标志的施工控制区限速方案,结果如图6所示。
3 效果评价
3.1 驾驶模拟实验
3.1.1 实验场景设计
基于ScaNer Studio驾驶模拟实验平台进行仿真实验,分别按照图6和图7的方法进行施工区交通组织。从施工警告标志起点至解除限速标志之间的路段长度为3.38 km,路基宽度为42 m,车道宽度为3.75 m,中间带宽度为4.5 m,路拱横坡坡度为2%。为了避免平纵曲线变化对实验结果产生影响,所有实验场景均设置在纵坡为零的直线段。实验时,实验车辆先通过3 km长的预实验路,再通过按图6设置的施工区交通组织场景,最后通过3 km长的自由行驶区,连接图7设置的施工区交通组织场景,整个实验路段长度为13.5 km。
选择小客车作为实验车辆。公开招募30名驾驶员进行驾驶模拟实验,其中男性驾驶员22人,女性驾驶员8人。驾驶员年龄为23~30岁(平均值24.4,标准差1.82);驾龄为0.5~6 a(平均值3.3,标准差1.46)。实验时要求驾驶员按照平时的驾驶习惯操纵驾驶模拟器。
采集车辆位置、速度、加速度,方向盘转角速率等信号,采样频率为50 Hz。基于驾驶负荷的道路通行安全舒适性评价结果表明,驾驶负荷提前于道路线形变化;根据车辆运行时驾驶员的视觉需求,确定车辆行驶前方100~250 m有效注视范围为前方线形对车速的影响范围,确定后方200 m加减速长度范围为后方线形对车速的影响范围[16]。根据仿真实验中施工区布置方式,选择施工警告区上游200 m至终止区下游100 m之间的路段作为实验数据分析范围。
3.1.2 实验结果分析
安全与效率是评价交通系统运行状态的两个主要指标。断面交通流速越大,代表交通系统运行效率越高。当前方道路通行环境变差时,驾驶员通过降低车速来保障行驶安全;当前方道路通行环境变好时,驾驶员通过操纵加速踏板加速来满足期望车速,因此,加速度的变化可反应交通系统的运行风险。根据上述分析,选择平均速度和平均加速度表征交通系统的运行状态。绘制交通流参数在不同场景中沿道路纵向的变化,结果如图8所示。
由图8(a)平均流速沿道路纵向的变化可以发现,规范方案中警告区内交通流速出现两次急剧的下降,这主要是因为驾驶员观察到车行前方两处限速标志而紧急制动造成的。在中分带开口区上下游路段,交通流速经历了先下降再增加的变化过程。而本研究方案在施工警告区中的交通流速下降点滞后于规范方案,且呈现出长距离的均匀下降状态。在中分带开口区之前,交通流速维持在限速值附近波动,并在驶入对向车道后出现回升。综合来看,本研究方案下的施工区交通流速平均值大于规范方案。
由图8(b)平均加速度沿道路纵向的变化可以发现,相较于规范方案中加速度在限速标志前、中分带开口区内的急剧变化过程,本研究方案下的加速度变化幅度较小,表明驾驶员可以更从容应对车辆通行环境变化,也说明了本研究方案下的行车风险更小。
3.2 优化效果评价
3.2.1 评价方法
为了验证本研究所建立的施工控制区梯级限速方案实施效果,采用安全与效率协调优化的交通评价指标对不同限速方案下的交通系统运行状态进行量化分析。当第[i]种限速方案下的系统综合安全指数[fSi]和综合效率指数[fEi]与理想点[PA,PB]之间的欧氏距离[O]越小,表明此限速方案越优。具体评价方法如
式中:理想点[PA=fminS],[PB=fminE]。
1) 系统综合安全指数。选择单位时间内,通过实验路段的所有车辆的制动减速度超出临界值的累积行驶距离,表征系统的运行安全水平,计算方法如
式中:[q]为交通量,pcu;[lj]指在实验数据分析范围内,第[j]辆车的制动减速度小于临界值的累积行驶距离,km;[l]指实验数据分析范围;[ac]为制动减速度临界值,[aj]为加速度的计算值,m/s2。
全部试验道路全部被试数据的减速度第85%分位值,可用于运行速度模型中减速度值的标定,进而计算车辆驶入平曲线时的运行速度变化[17]。在进行减速度取值时,一方面可建立减速度与公路几何参数之间的关系;另一方面可指定一个区间或一个恒定值,例如-0.85 m/s2或-1 m/s2。在施工区限速标志前,如果没有严格的限速监督措施,驾驶员更多凭借自身驾驶经验操纵车辆,此种情况类似于车辆在复杂线形公路上的行驶工况。因此,将车辆制动减速度的临界值设为-1 m/s2,用于表征车辆在特定驾驶环境中的行驶工况。
2) 系统综合效率指数。以单位时间内通过实验路段的车辆总消耗时间表征系统的运行效率,计算方法如
式中:[Tj]为第[j]辆车的路段平均行程时间,h;[vj]为第[j]辆车在实验路段内的平均行程车速,km/h。
3) 指标归一化。为了建立安全与效率协调优化的交通评价指标,分别对综合安全指数[fSi]和综合效率指数[fEi]进行归一化处理,计算方法如
式中:[x]为各指标无量纲处理后的值;[x]为待进行无量纲处理的值;[m]为待进行无量纲处理的最小元素值;[M]为待进行无量纲处理的最大元素值。
3.2.2 评价结果
根据驾驶模拟实验结果,当实验样本量[q]等于30时,采用本研究方法所建立的施工控制区限速方案,所有实验车辆制动减速度小于临界值的平均行使距离[lj]=73.43 m,所有实验车辆的平均行程车速[vj]=68.80 km/h,所有实验车车辆的平均行程时间[Tj]=193.6 s。采用规范方法建立的施工控制区限速方案,[lj]=101.45 m,[vj]=62.18 km/h,[Tj]=213.1 s。将此计算结果分别代入式(12)和式(13),得到本研究方案下的施工控制区综合安全指数[fS]=2.203,综合效率指数[fE]=1.613;规范方案下的施工控制区综合安全指数[fS]=3.044,综合效率指数[fE]=1.776。计算结果表明,与规范方案相比,本研究方案下的施工控制区综合安全指数提高了27.62%,综合效率指数提高了9.15%。将各指标值进行归一化后代入式(11),结果表明本研究方案下的目标函数值更小,说明依据本研究所建立的施工控制区限速方案更优。
4 结论
1) 中分带开口区平均交通流速最小、平均车头时距最短,是施工控制区中通行安全与通行效率最低的区域。
2) 在设计速度为120 km/h、借用对向车道通行的高速公路施工控制区路段,当中央分隔带开口长度为70 m、导行区共设置两条行车道时,应采用以40 km/h为最终限速值、以20 km/h为降速幅值、以50 m为末级限速标志前置距离的变间距高速公路施工控制区四级限速方案。
3) 采用安全与效率协调优化的交通评价指标,驾驶模拟实验结果表明,同《公路养护安全作业规程》(JTG H30—2015)中的施工控制区限速方案相比,本研究方案下的施工控制区综合安全指数提高了27.62%,综合效率指数提高了9.15%。
参考文献:
[1] CHEN C H, SCHONFELD P. Work zone lengths for a four-lane road with an alternate route[J]. Journal of Transportation Engineering, 2005, 131(10): 780-789.
[2] KORDANI A A, MOLAN A M. The effect of combined horizontal curve and longitudinal grade on side friction factors[J]. Journal of Civil Engineering, 2015, 19(1): 303-310.
[3] DOMENICHINI L, LA T F, BRANZI V, et al. Speed behaviour in work zone crossovers[J]. Accident Analysis and Prevention, 2017, 98: 10-24.
[4] RAVANI B, WANG C. Speeding in highway work zone[J]. Accident Analysis and Prevention, 2018, 113: 202-212.
[5] MENG Q, WENG J. Evaluation of rear-end crash risk at work zone using work zone traffic data[J]. Accident Analysis and Prevention, 2011, 43(4): 1291-1300.
[6] PORTER R J, MASON J M. Modeling speed behavior of passenger cars and trucks in freeway construction work zones[J]. Journal of Transportation Engineering, 2008, 134(11): 450-458.
[7] 田林, 許金良, 贾兴利, 等. 基于运行速度的高海拔地区一级公路长直线路段限速值[J]. 公路交通科技, 2019, 36(1): 138-142.
TIAN L, XU J L, JIA X L, et al. Speed limit of long straight section of first class highway based on operating speed in high-altitude area[J]. Journal of Highway and Transportation Research and Development, 2019, 36(1): 138-142.
[8] 胡立伟, 陈政, 张婷, 等. 高原特长隧道驾驶人动态决策跟驰模型与限速研究[J]. 交通运输系统工程与信息, 2018, 18(5): 211-218.
HU L W, CHEN Z, ZHANG T, et al. Driver′s dynamic decision car-following model and speed limit in plateau extra-long tunnel[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(5): 211-218.
[9] 徐进, 丁瑞, 李诗佳, 等. 山区高速公路车辆速度特性与区间限速方法[J]. 东南大学学报(自然科学版), 2022, 52(2): 352-361.
XU J, DING R, LI S J, et al. Speed behavior of mountain expressway and determination method of interval speed limit[J]. Journal of Southeast University (Naturnal Science Edition), 2022, 52(2): 352-361.
[10] CHENG G, CHENG R. Optimizing speed limits upstream of freeway reconstruction and expansion work zones based on driver characteristics[J]. Journal of Transportation Engineering Part A, 2020,146: 040200667.
[11] 李瑞, 马荣国, 梁国华, 等. 高速公路限速区段安全与效率优化协调模型[J]. 哈尔滨工业大学学报, 2019, 51(3):158-164.
LI R, MA R G, LIANG G H, et al. Optimization and coordination model for speed limit section in freeway[J]. Journal of Harbin Institute of Technology, 2019, 51(3): 158-164.
[12] 孟祥海, 史永义, 王浩, 等. 高速公路施工作业区车速分布特征及限速研究[J]. 交通运输系统工程与信息, 2013,13(1): 149-155.
MENG X H, SHI Y Y, WANG H, et al. Speed distribution characteristics and speed limits of freeway work zones[J]. Journal of Transportation Systems Engineering and Information Technology, 2013,13(1): 149-155.
[13] HU W. Raising the speed limit from 75 to 80 km/h on utah rural interstates[J]. Journal of Safety Research, 2017, 61: 83-92.
[14] 潘兵宏, 吴明先, 王佐. 高速公路大修期间中央分隔带开口长度研究[J]. 公路, 2012(9): 214-217.
PAN B H, WU M X, WANG Z. Calculation model for median opening length in expressway overhaul engineering[J]. Highway, 2012(9): 214-217.
[15] 张楠楠. 动态环境下照度变化对驾驶人识认时间影响机理研究[D]. 合肥:合肥工业大学, 2015.
ZHANG N N. The mechanism research of illumination variation′s influence on driver′s recognition time under dynamic circumstance[D]. Hefei: Hefei University of Technology, 2015.
[16] 胡江碧, 王维利, 王健. 高速公路不同线形组合路段划分研究[J]. 中国公路学报, 2010, 23(S1): 53-57.
HU J B, WANG W L, WANG J. Research on classification of various combined alignment section on expressway[J]. China Journal of Highway and Transport, 2010, 23(S1): 53-57.
[17] 徐進, 周佳, 汪旭, 等. 山区复杂线形公路小客车纵向加速度特性[J]. 中国公路学报, 2017, 30(4): 115-126.
XU J, ZHOU J, WANG X, et al. Longitudinal acceleration performance of passenger cars on complex mountain highways[J]. China Journal of Highway and Transport, 2017, 30(4): 115-126.
通信作者:吕路(1991—),男,博士研究生,研究方向为道路安全与环境。E-mail:lvlu0426@tongji.edu.cn。