基于深度学习的钝体断面外形气动性能高效预测方法
2024-04-11 13:02:20李少鹏李海李珂
土木与环境工程学报 2024年1期
李少鹏,李海,李珂
(重庆大学 土木工程学院,重庆 400045)
平均风产生的静荷载简称静力风荷载,通常由无量纲参数三分力系数来描述,而过大的阻力和升力矩会让钝体断面产生横向位移和扭转,严重时甚至会出现风致静力失稳,进而影响结构的安全性和稳定性,由此可见,三分力系数对钝体断面抗风设计至关重要[1-3]。三分力系数影响因素有钝体断面气动外形、风攻角、雷诺数等,其中钝体断面气动外形尤为重要,不同钝体断面的截面形式、高宽比不同,则对应的三分力系数及变化规律也不尽相同[4-6],这也导致目前学术界仍未建立起钝体断面气动外形和三分力系数之间的数学联系。
目前测定三分力系数的常用方法主要有两种,1)将节段模型放入风洞进行试验,得到三分力系数[7-8];2)采用计算流体力学(CFD)仿真计算,得到三分力系数[9-10]。虽然这两种方法都广泛应用,但各有缺点,风洞试验设备投资大、试验所需人力物力较多,CFD 仿真计算则需要消耗大量计算资源,为了保证两者试验数据的准确性,可能都需要数周才能获得三分力系数。因此,算出静力风荷载后,精细地预测结构各组成部分所受到的风荷载需更长时间,大大制约了结构抗风设计效率。
近年来,随着神经网络技术的不断发展,人工智能预测技术逐渐应用在抗风领域[11]。针对钝体断面,李乔等[12]采用BP 神经网络预测主梁断面静力三分力系数;杨兴旺[13]采用BP 网络识别桥梁主梁颤振临界风速、静力三分力系数;黄继鸿等[14]采用BP 神经网络预测翼型的升力系数和阻力系数;针对扁平箱梁和倒梯形箱梁两种断面的气动参数,陈讷郁等[15]采用BP 神经网络进行预测;Liao 等[16]通过4 种机器学习方法的对比,精准预测不同流线型箱梁的颤振临界风速;Hu 等[17-18]通过多种机器学习方法的对比,精准预测圆柱表面风压和压力系数。以上研究虽然提供了对钝体断面新的表达方法,但对于气动外形,仅用参数化和坐标表达具有一定的局限性,复杂断面难以快速进行,不具备普适性。Chen等[19]提出采用0-1 数据对表示气动外形,0 表示气动外形外,1 表示气动外形内,但这种气动外形设计无法提供足够的信息;Miyanawala 等[20]提出用Euler 距离场表达气动外形,快速高效、具有足够信息。考虑直接预测三分力系数较为复杂,对模型性能要求较高,因此,采用深度学习方法搭建模型。在预测流线型断面的三分力系数和压力方面,深度学习方法也有一定应用,陈海等[21]搭建深度学习模型——卷积神经网络,预测了翼型的法向力系数;廖鹏等[22]等利用深度学习模型,结合CFD 预测翼型前缘压力分布。然而,目前采用深度学习方法预测未知钝体断面三分力系数的研究还较少。
深度学习是人工智能领域近年来取得的最重大的研究成果之一,由于出色的数据拟合能力、GPU 等硬件的出现,其进入高速发展阶段。卷积神经网络(CNN)可以对图像特征进行自动识别,且卷积核平移不变性,可以极大地降低训练难度,非常适合处理不同形状钝体断面图像[22]。笔者提出,钝体断面气动外形以图像数据作为输入,可以实现不同钝体断面外形的一致表达,有效回避异构数据问题。该方法通过CNN 深度学习模型预测钝体断面三分力系数,将钝体断面气动外形与三分力系数直接关联,解决传统方法获取三分力系数效率低的问题,为今后气动外形优化提供技术支持。
1 钝体断面气动系数预测模型
深度学习中的神经网络模型输入需能够表达钝体断面的气动外形信息,且该信息应该具有一致的表达结构。对于钝体断面气动外形的表达问题,使用坐标点的传统方式会使输入数据的结构和大小与外形相关联,引发数据异构问题。针对该问题,提出一种图像形式的气动外形描述方法,可以有效地与卷积神经网络结合,实现输入数据一致性表达的同时,提高了信息传递效率。基于此方法,以3 个场对气动外形进行描述,分别是距离场、顺风向坐标场和横风向坐标场。
1.1 距离场
外形影响气动力的最主要因素之一是流场的边界层。采用距离场的形式描述外形,将外形以周围空间各点与外形的距离进行表达,可以强化输入信息与边界层的逻辑联系。具体表达如式(1)所示。
式中:指数函数内部表示流场空间位置RΦ与气动外形最近边界RΓ之间的无量纲距离;B为气动外形特征长度;U为平均风速,m/s。因为更加关注靠近气动外形边界周围的流场,忽略了离气动外形较远的流场,需要输入更多的边界周围信息,为此,通过负指数形式来增加边界层附近的权重。采样位置在边界上或者边界内时,β为0,反之为1。
图1 为距离场,其中,红色越深,表示该坐标点数值越接近于1,即该坐标点越接近于气动外形边界,蓝色越深,表示该坐标点数值越接近于0,即该坐标点离气动外形边界越远。
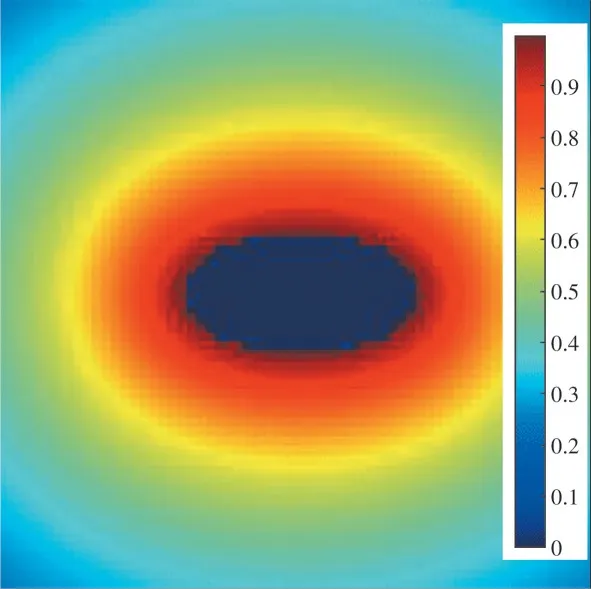
图1 距离场Fig.1 Distance field
1.2 顺风向坐标场和横风向坐标场
单纯采用距离场作为输入存在信息缺失的问题,为了方便描述,考虑如图2 所示的锯齿状形状。对于卷积神经网络,其感受野为图像的某一区域,以图中红线框表示。当感受野平动时,如果仅使用距离场信息,气动外形不同位置会提供相同的数据信息,导致卷积神经网络接受到相同的输入特征信息。然而,实际情况是气动外形不同位置对应的压力场不同,对阻力系数的贡献也不尽相同。因此,需要构造其他输入信息,以确保信息的充分性。
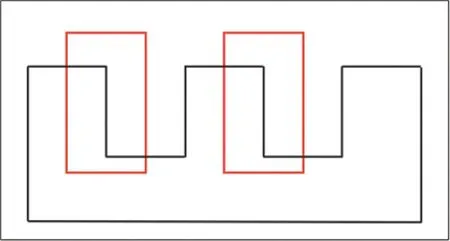
图2 气动外形示意图Fig.2 Schematic diagram of aerodynamic shape
为兼顾输入信息获取的便携性和流场信息的必要性,设置一个流场流动方向的图像数据和一个描述横风向方向的图像数据作为输入数据,即顺风向坐标场和横风向坐标场。
其中,顺风向坐标场见式(2),靠近入口的位置为上游,对应的数据较小,靠近出口的位置为下游,对应的数据较大,以此实现对空间上下游的描述。为避免对所有数据再次归一化,选择设定最大值为1。
式中:X为空间点的X方向坐标,原点为形状在顺风向投影的中心;采样位置在边界上或者边界内时,β为0,反之为1。图3 为顺风向坐标场,其中,红色越深,表示该坐标点数值越接近于1,即该坐标点越靠近下游,蓝色越深,表示该坐标点数值越接近于0,即该坐标点越靠近上游。
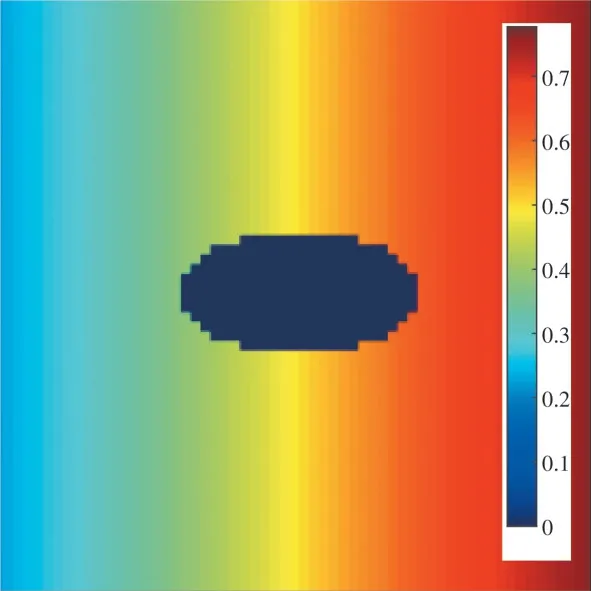
图3 顺风向坐标场Fig.3 Coordinate field of streamwise wind
此外,横风向坐标场见式(3)。构造方法与顺风向坐标场类似,取迎风顶点的横风向投影中点作为原点。如此,对于圆形、六边形断面,原点位于迎风端点;对于零度风攻角的矩形断面,原点位于迎风面中点。
式中:Y为空间点的Y方向坐标;采样位置在边界上或者边界内时,β为0,反之为1。图4 为横风向坐标场,其中,红色越深,表示该坐标点数值越接近于1,即该坐标点越接近于迎风面中点,蓝色越深,表示该坐标点数值越接近于0,即该坐标点离迎风面中点越远。

图4 横风向坐标场Fig.4 Cross-wind direction coordinate field
2 CNN 框架
输入为3 个图像,按照式(1)~式(3)编程,生成距离场、顺风向坐标场和横风向坐标场,输出为阻力系数。根据输入和输出设计构建的CNN 结构如图5 所示。

图5 设计的CNN 结构图Fig.5 Design of CNN structure diagram
输入层为包含距离信息和流场信息的图像。输入图像分辨率越高,模型预测越准确,但模型复杂度和训练时间也会增加,因此,选择合适分辨率非常重要。一般输入层大小需要能够被2 整除多次,以保证卷积层深度。选择64×64 像素为输入分辨率,有3 个场作为输入,即64×64×3 的三维矩阵,每个场取值均确保在0 到1 之间。输出层输出数据用作回归分析,对钝体断面阻力系数进行预测,为保证输出数据范围在0 到1 之间,还加入了sigmoid 函数,见式(4)。
隐藏层中:卷积层是卷积神经网络的核心模块,主要确定卷积核尺寸、数量、步长、零填充的数量,卷积核尺寸有越来越小的趋势,因为小尺寸卷积核可以通过堆叠替代大尺寸卷积层并且感受野大小不变[23]。选择卷积核大小为3×3,卷积核数量逐步增加。池化层负责对数据空间进行下采样,其感受野不宜过大,否则易造成池化过于激烈,信息丢失过多,导致欠拟合风险[24]。采用2×2 的感受野做最大池化,滑动步长为2。激活函数选择ReLU函数,其简化了计算过程,避免了梯度爆炸和梯度消失问题[25]。全连接层神经元与前一层所有的神经元全部连接,因此,第1 层全连接层神经元数量为S个,第2 层全连接层数量为250 个,第3 层全连接层数量为10 个。
3 输入和输出数据获取
CNN 框架搭建完成后,输入和输出数据的获取也非常关键,输入数据为3 个类图片的数据场,输出数据为阻力系数,获取不同钝体断面气动外形下的输入和输出数据,为深度学习模型提供数据支持非常重要。
按照基本形状,分为正六边形、圆形、矩形、正菱形4 种,为降低模型训练难度,所有形状做到上下和左右对称。根据横向长度与竖向长度比值的不同,每种基本形状下又有不同形状,为方便起见,采用无量纲形式来确定形状,固定所有形状的横向长度为1。考虑到正六边形非常接近钝体断面,因此,正六边形输入数据占到总数据的57%,增强了模型对钝体断面的学习能力。
根据正六边形上下角点距离X=0 直线垂直距离的不同,分成4 组,圆形、矩形、正菱形各1 组,共7组,每组15 个不同形状,共105 个,如表1 所示。
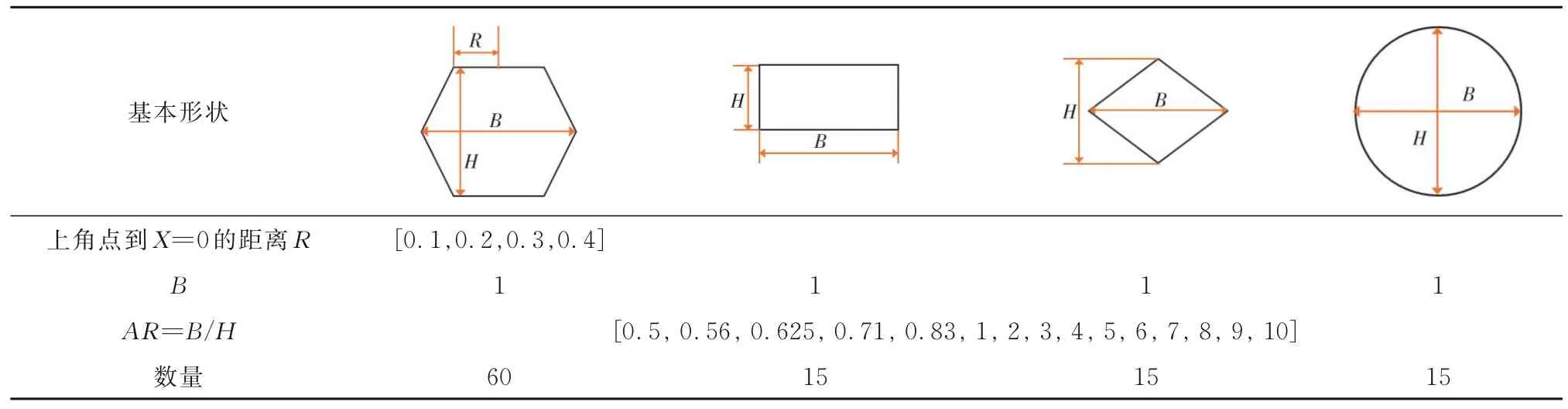
表1 气动外形工况一览表Table 1 List of pneumatic shape working conditions
输入数据获取需先生成64×64 的网格位置坐标,再根据式(1)~式(3),分别获得相应网格点到形状边界的最小距离信息、流动方向的流场信息和横风向方向的流场信息。根据流场特征,气动外形内无流场信息,因此,输入中气动外形内的数据信息也人为设置为0。输入图像设计的公式中已经考虑归一化的问题,输入数据数值都在0 到1 之间。
输出数据为阻力系数,采用CFD 数值模拟计算得到稳定后的压力流场。计算域为矩形,长度和宽度分别为15B和10B,B为钝体截面宽度。为了防止网格变化速度太快,设置3 个计算区域,定义刚性区域,以保持网格形状不变,在刚性区外使用变形区,实现网格平滑处理,最后,使用固定区域对计算域中的其他部分进行网格划分。
采用Fluent 软件,湍流模型选择RANs 模型,具体选择k-ωSST 模型,在近壁面采用k-ω模型,边界层外缘和自由剪切层采用k-ε模型,在k-ω模型和k-ε模型间采用一个混合函数过渡。入口边界设置为速度入口,出口设置为压力出口,形状表面采用无滑移条件,这意味着物理表面的流动状态等于形状的运动。待流场稳定后,读取数据,通过对稳定压力流场进行数据处理,得到阻力系数。
将全部105 个不同形状按照上述操作进行处理,得到对应形状的输入和输出数据。综上所述,输入数据的图像张量为(84,3,64,64),输出数据张量为(21,3),快速得到输入和输出数据,为之后的模型训练做好准备。
4 模型性能评测与优化
深度学习模型的深度和宽度直接影响模型性能,模型加深能一定程度提升模型性能,但网络深度也不是越深越好,深层网络容易带来梯度不稳定、网络退化等问题,且无法通过优化消除,导致模型网络深度不断加深,性能并未出现明显提升,甚至出现下降的情况,模型宽度同理,随着模型宽度的加深,模型性能并不一定显著提升。基于之前设计的卷积神经网络,寻找最优的模型深度与宽度,主要通过模型预测阻力系数的平均绝对误差MAE,见式(5),结合模型参数量大小综合判定。
式中:ti为阻力系数真实值;yi为阻力系数预测值。
4.1 模型深度优化
与模型宽度相比,模型深度对于模型性能的影响更大,因此,先确定最优的模型深度[26-27]。主要从模型预测误差大小和模型参数量来进行评估。将卷积层、池化层、ReLU 层三者称作一层,选择卷积神经网络卷积层数为6、5、4、3、2 的5 类不同层数的CNN 模型来测试不同深度下模型的性能,采用完全相同数据处理后的输入和输出数据,模型参数配置完全相同,结果见表2。
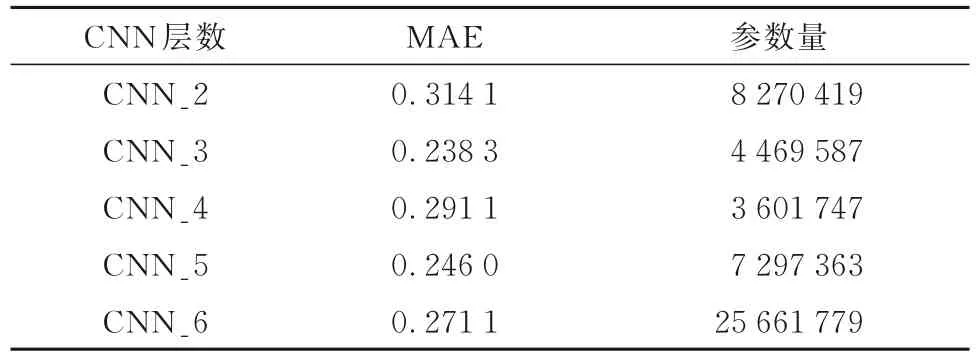
表2 模型深度性能对比Table 2 Comparison of model depth performance
由表2 可知,随着CNN 层数的增加,MAE 呈先减小到最小值,后出现增大的情况,CNN 层数为5层时,MAE 再次减小,但未减小到CNN 层数为3 层时的MAE,同时,相比于其他CNN 模型,其参数量也相对较少,时间性能更加优秀。CNN 层数为3 层时,MAE 最小,说明该网络深度下模型性能更优,因此,选择CNN 层数为3 层的网络模型。
4.2 模型宽度优化
在确定深度学习模型层数为3 层的情况下,优化深度学习模型宽度D,主要从模型预测误差大小和模型参数量来进行评估。基于CNN 采样,第1 层宽度为64,选择对比的CNN 网络第1 层宽度分别为128 和256,第2 层和第3 层模型宽度分别为前一层模型宽度的2 倍,采用完全相同数据处理后的输入和输出数据,模型参数配置完全相同,结果见表3。

表3 模型宽度性能对比Table 3 Comparison of model width performance
由表3 可知,随着CNN 宽度的增加,MAE 出现先减小后增大的情况,当CNN 网络初始宽度D为128 时,MAE 最小,说明该网络宽度下模型性能更优,同时,其参数量最小,说明本模型消耗时间最少。因此,选择CNN 网络初始宽度D为128。
综上所述,通过MAE 大小和模型参数量大小对比,选择CNN 层数为3 层的网络深度,网络宽度为128-256-512 的网络模型,第1 层全连接层中神经元数量S为32 768 个。
5 试验结果
5.1 试验设置
Pytorch 在科学研究方面表现非常优秀,主要体现在Pytorch 风格非常Python 化,降低了入门的难度,且搭建深度学习模型时可以逐层搭建,方便实时修改。鉴于搭建模型时修改细节比较多,因此,使用Pytorch 来搭建深度学习模型[28]。
在所使用的105 个数据中选取80%作为训练数据集,剩下的作为验证数据集,训练数据集共有84 个不同形状的输入和输出,验证数据集有21 个不同形状的输入和输出,每次训练前都对样本数据进行随机打乱和批量读取。模型训练方法选择SGD,使用0.2 作为训练模型的Dropout 率,以防止过拟合。
5.2 预测回归结果
通过卷积神经网络预测阻力系数的结果如图6所示,识别误差见表4。

表4 阻力系数误差Table 4 Drag coefficient error
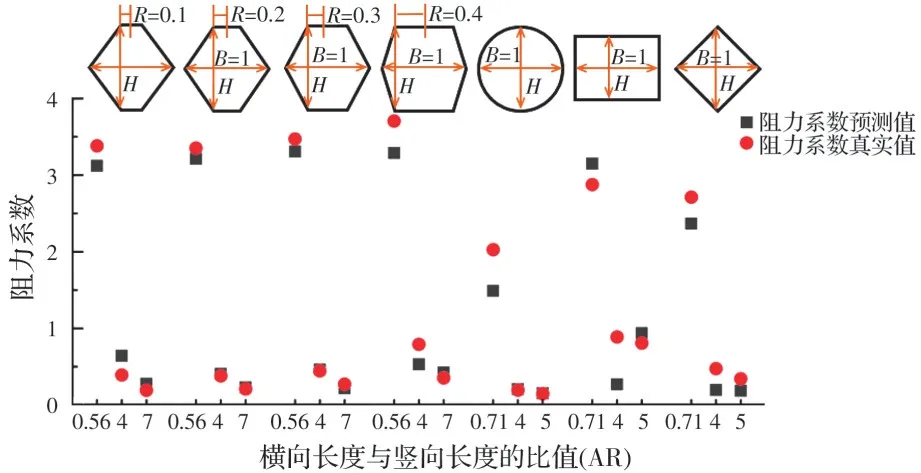
图6 阻力系数预测结果Fig 6 Drag coefficient prediction results
由图6 和表4 给出的预测结果可知,当R=0.1、R=0.4 时,正六边形、矩形和正菱形预测的阻力系数相对误差较大。当R=0.2、R=0.3 时,正六边形和圆形预测的阻力系数相对误差较小,主要是因为当横向长度与竖向长度的比值(AR)较小时,阻力系数较大,在模型中占的权重较大,导致模型更偏向于拟合权重较大的数据。对于拟合横向长度与竖向长度的比值(AR)较大、阻力系数较小的情况,无法达到精度要求,使得相对误差较大。当R=0.2、R=0.3 时,正六边形和圆形相对误差较小,明显可以看到,横向长度与竖向长度的比值(AR)较大时,拟合非常准确。
深度学习模型针对2 个截面预测的平均相对误差在10%以下,针对3 个截面预测的平均相对误差在30%以上,主要是模型输入和输出的逻辑关系过于薄弱,导致模型性能容易出现反复。
5.3 模型的时间性能
提出使用卷积神经网络来预测阻力系数是为了减少得到钝体断面气动性能的时间,因此,有必要评估深度学习方法的时间性能。
通过编写好的代码,输入设计约1 s 即可完成,输出设计需要进行网格划分、服务器计算等一系列操作,得到稳定流场后,计算得到阻力系数约需10 s。本文卷积神经网络进行一次迭代训练的平均时间为1.08 s,进行1 000 次训练迭代所需的总时间约为1 080 s,使用已经训练好的模型进行一次回归预测,即产生阻力系数所需的平均时间为1 s,一共需要1 092 s。
相比于传统基于CFD 计算和风洞试验需要几周时间才能得到三分力系数,基于深度学习的预测方法在时间性能上得到了数量级的提升。
6 结论
提出将不同钝体断面的气动外形信息转化为图像数据而不依赖于传统设计参数,使用修改和优化后的卷积神经网络对气动外形图像进行回归预测,建立钝体断面气动外形和阻力系数之间的联系,且预测精度相对较高。针对相对误差较大的钝体断面,后续将尝试采用新的输出,强化输入和输出逻辑关系的同时,针对深度学习模型来进行改善,进一步提升阻力系数的预测精度。
与传统的风洞试验和CFD 仿真计算方法相比,在允许误差范围内,提出的卷积神经网络模型计算时间达到了数量级的提升,为钝体断面气动外形优化提供了计算基础。
猜你喜欢
天然气与石油(2022年4期)2022-09-21 07:05:54
韩国语教学与研究(2022年3期)2022-02-08 06:04:52
中国品牌(2021年7期)2021-08-09 21:21:51
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
测控技术(2018年9期)2018-11-25 07:44:24
戏剧艺术(上海戏剧学院学报)(2016年1期)2016-01-23 02:35:08
电力自动化设备(2015年4期)2015-09-28 02:43:02
中国医疗美容(2015年1期)2015-07-12 10:06:33
凿岩机械气动工具(2014年3期)2014-03-01 04:00:08
凿岩机械气动工具(2014年3期)2014-03-01 04:00:07