考虑STATCOM多种控制模式的无功储备优化方法
2024-04-09 07:23:08郝蛟赵彪王浩然沈欣炜张宗包
广东电力 2024年3期
郝蛟,赵彪,王浩然,沈欣炜,张宗包
(1. 深圳供电局有限公司,广东 深圳 518000;2. 清华大学深圳国际研究生院,广东 深圳 518000)
电网运行中,无功电压调节设备种类繁多,特点各异。变电站内部常用的无功补偿装置有电容器和电抗器,以及并联型柔性交流输电系统(flexible alternative current transmission systems,FACTS)无功补偿设备,如静止无功补偿器(static var compensator,SVC)和静止同步补偿器(static synchronous compensator,STATCOM)。FACTS基于现代大功率电力电子技术,结合先进的控制理论,能够实现对交流输电网的运行参数和状态变量的快速调节,达到提高输电系统运行效率和稳定性的目的。电容器和电抗器(以下简称“容抗器”)能够向系统提供感性和容性的无功功率,可以随时投切部分或者全部容抗器,运行灵活。但是容抗器属于离散性的无功装置,只能离散投切,阶跃性质的无功突变可能会对系统造成冲击,同时容抗器存在着无功补偿不精确的缺点。以电力电子技术为核心的STATCOM具有突出的响应快速性和连续调节平滑性,具有稳态精度高、可调范围大等优点[1]。因此合理的STATCOM控制策略能够增强系统抵御电压突变的能力,提高系统的动态电压稳定水平。STATCOM的实际应用场景和控制策略较多。文献[2]和文献[3]分析了STATCOM在交直流受端系统中的暂态过程的优良特性。文献[4]从应对系统电压跌落、电压骤升等方面对STATCOM和调相机进行了技术性比较,给出了STATCOM的安装选择建议以及分析安装后的实际效果。文献[5]提出了一种STATCOM暂态无功控制策略用来加快系统恢复速度;文献[6]阐述了STATCOM在应对新能源接入系统故障后低电压穿越时所发挥的作用。STATCOM的动态性能取决于实际运行的无功储备,因此需要预留足够的无功裕度实现电力系统的预防控制。
STATCOM作为一种电力电子型的无功补偿装置,在故障期间有一定的过负荷能力,在故障切除后也可以加快电压的恢复速度,可为电力系统提供及时的无功支撑。因此STATCOM对于电力系统来说是一种非常宝贵的无功源。在稳态调压上,STATCOM的调整速度也远快于传统的同步发电机,可以在稳态调压比较紧急的情况下优先出力。STATCOM在稳态和暂态下的表现性能取决于自身的无功储备,如果在日常工作中过分使用STATCOM导致无功储备不足,就会导致STATCOM在稳态调压和暂态过程的性能无法充分发挥。
在以往的参与电压控制和无功置换协调控制的STATCOM控制策略设计研究中,文献[7]提出了STATCOM实际运行的几种控制模式,包括电压控制、无功控制以及阻尼抑制等,充分发挥了STATCOM调压和抑制电压失稳的优良性能。文献[8]研究了STATCOM提升交直流混联系统电压稳定性的作用机制,提出了相应控制策略,并结合广东电网验证了STATCOM的应用效果。文献[9]为了充分发挥调相机暂态无功输出能力,增大其暂态无功调节裕度,为调相机配置了电容器和电抗器,从而充分利用静态无功补偿装置的稳态无功输出能力和调相机的暂态无功支撑能力。文献[10]将静止无功补偿器SVC纳入到自动电压控制(automatic voltage control,AVC)中,并且构建了最小化SVC无功出力的无功置换优化模型,但未充分考虑容抗器的投切约束。文献[11]提出合理安排变电站内的固定电容器组容量及STATCOM容量的方法,有利于降低网络损耗,提高系统的电压稳定性。文献[12]提出一种基于模糊算法的变电站内部调节STATCOM的动态无功备用容量、降低电容器的投切次数、延长其使用寿命的方法。文献[13]提出一种基于模型预测控制的动静无功置换机制,为电网预留足够的无功资源。
目前变电站内部STATCOM与离散型无功补偿装置的协调配合不足,依据于规则库动作的无功置换策略的不足,没有充分考虑容抗器的动作次数以及投切动作时间间隔的约束。因此如何更好地对STATCOM和容抗器进行协调控制,满足电压控制的同时增大STATCOM的无功储备仍然值得研究,有必要对STATCOM和电容器的特性进行分析,设计其控制策略,提出新的STATCOM与离散型无功补偿装置之间的无功置换方法,来使STATCOM更好地应对电网可能出现的扰动以及提高STATCOM的动态无功储备。
电抗器主要用于限制由于线路开路或者轻载所引起的电压升高,在日常的调度中主要是通过投切电容器来进行日常的调压,站内的电容器的安装容量多于电抗器,因此本文主要研究STATCOM和电容器的特性。
本文主要工作如下:
a)对STATCOM和电容器两者无功补偿特性进行分析,分析其电压控制原理和电压-电流(V-I)特性,并归纳STATCOM和电容器两者在无功补偿上和调压上的特点。
b)给出STATCOM实际运行的控制模式,介绍各种模式的功能及切换逻辑。
c)提出一种STATCOM与离散型无功补偿装置的无功置换优化策略和数学优化模型,在STATCOM的稳态定电压控制和远方AVC控制2种控制模式下,分别提出无功置换策略,增大STATCOM的无功裕度,同时充分考虑兼顾容抗器的动作次数最少。
1 STATCOM和电容器特性分析
STATCOM是一种并联无功补偿器,利用电压源换流器(voltage source converter,VSC)构成主电路。STATCOM具有调节速度快、稳态精度高、可调范围大等优点。STATCOM平滑地控制电压,既能够发出无功,又能吸收无功。可以通过调节STATCOM输出电压(逆变器侧)与STATCOM所连母线(系统侧)电压之间的幅值关系来调节STATCOM的输出或吸收的无功功率[14-15]。
典型采用有差斜率电压调节的STATCOM的V-I特性如图1所示,其中:US为STATCOM所接的系统母线电压;IS为STATCOM的输出电流;US,ref为STATCOM所接系统侧电压参考值;US,max、US,min分别为STATCOM运行电压上、下限;IS,max、IS,min分别为STATCOM输出无功电流上、下限。

图1 STATCOM的V-I输出特性Fig.1 V-I output characteristics of STATCOM
在可控区域内表现为一条向上倾斜的线段,其斜率由调差系数决定,一般为0.5%~10%。当STATCOM端电压超过可控电压上下限时,它作为恒流源,保持最大的感性电流或者容性电流不变。因此,当STATCOM工作在其电压控制上下限范围外时,STATCOM提供比电容器更多的无功补偿。因为STATCOM的输出电流保持不变,其无功功率随电压线性下降,而电容器能够提供的无功功率随电压的平方下降。
当STATCOM处于线性控制区域内时,有
(1)
式中Xsl为STATCOM线性控制区内的斜率电抗。
系统侧的V-I特性可由受STATCOM调节的母线看进去所得到的戴维南等效电路来确定,其中戴维南阻抗起主要作用的是感性阻抗。系统侧等效戴维南等值电路如所图2所示,其中:Eth为戴维南等效电动势;Xth为等效阻抗;Xload为可变无功负荷;UG和IG为系统侧母线电压和电流。

图2 系统侧等效戴维南电路Fig.2 System-side equivalent Thevenin’s circuit
系统侧的V-I特性表达式为
(2)
因此系统侧的V-I特性为向下倾斜的直线。为了检验STATCOM在电力系统中应用的性能,应该将STATCOM和系统侧的特性一起加以考虑。系统侧的V-I特性与STATCOM的V-I特性两者之间的交点即为STATCOM的工作点,此工作点决定了STATCOM的端电压和输出电流值。图3给出了3种系统特性,其中①的系统特性代表了额定情况,系统和STATCOM的V-I特性相交于点A,此时系统电压就等于参考值US,ref。
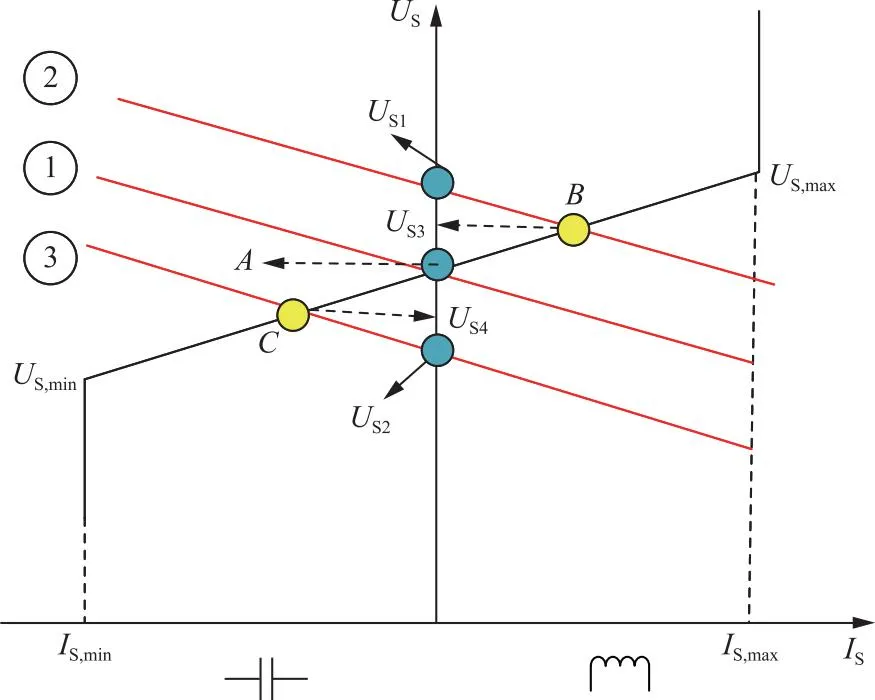
图3 给定系统运行情况下STATCOM运行点Fig.3 Operating points of STATCOM under given system operation condition
a)若由于系统负荷减小导致Eth增加,则系统V-I特性曲线上移至②,若没有STATCOM,系统电压US将增加至US1,当有STATCOM时,运行点变为B,STATCOM作为电感运行,吸收感性电流,系统电压降低为US3。
b)若由于系统负荷增加导致Eth减小,则系统V-I特性曲线下移至③,若没有STATCOM,系统电压US将减小至US2,当有STATCOM时,运行点变为C,STATCOM作为电容运行,发出感性电流,系统电压升高为US4。
可见,STATCOM根据系统电压变化可进行感性和容性输出,来保持STATCOM所连母线的电压稳定。
电容器和STATCOM无功补偿特点见表1。

表1 STATCOM与电容器特点Tab.1 Characteristics of STATCOM and capacitor
针对两者在补偿特性上各自的特点和差异,为了应对电力系统可能出现的大扰动,在满足电压需求的前提下,STATCOM要尽可能保留较大的无功裕度。
2 STATCOM常用控制模式分类
实际工程运行中,STATCOM有如下几种控制模式。
a)稳态定无功控制。STATCOM快速稳定调节无功输出,不会导致无功冲击,且实际无功输出功率与设定值之间的最大偏差要满足精度要求。
b)稳态定电压控制。将STATCOM所连母线的电压调整到电压正常的波动范围内,在STATCOM的V-I特性曲线的线性控制区实现定电压控制。
c)暂态电压控制。暂态电压控制模式具有最高的优先级。当电力系统发生大扰动或者严重的短路故障以后,STATCOM快速输出大量无功,支撑电网电压的恢复。
d)AVC控制模式。远方AVC控制模式可以根据主站下发AVC指令进行指定无功输出。参与非接入母线的电压控制[16]。
e)有源滤波控制模式。STATCOM也可以作为有源滤波器,STATCOM以并联方式接入电网,可以通过控制STATCOM的输出谐波电流用于补偿负载的谐波电流,基本思路就是从补偿对象中检测出来谐波电流,由STATCOM产生一个与该谐波电流大小相等但相位相差180°的补偿电流,从而抵消谐波。
本文主要研究稳态定电压控制、暂态电压控制和远方AVC控制模式下的STATCOM与容抗器的无功置换方法。
3 STATCOM与电容器的无功置换策略
变电站内STATCOM与电容器和电抗器之间的无功置换,是在保持置换前后电压不变的前提下,考虑电容器组的投切时间以及投切次数最少、投切均衡程度等因素,用变电站内部现有的满足投切时间间隔的可投的容抗器将STATCOM的无功出力置换出来。下面分别研究STATCOM在不同的电压控制模式下的无功置换策略和数学模型。
3.1 稳态定电压控制下的无功置换策略

3.2 暂态电压控制下的无功置换策略
当STATCOM处于暂态电压控制模式时,由于电容器组的投切时间较长,在短时间内来不及动作,故STATCOM与容抗器组的协调控制策略为:容抗器不动作,STATCOM根据系统的无功缺额发出相应的无功,直至达到额定容量。故障切除后,STATCOM恢复正常状态。
3.3 远方AVC控制模式下的无功置换策略
远方参与AVC控制模式是指当STATCOM接收到远方AVC控制指令时,STATCOM在保证接入点母线电压不越限的原则下,按照远方AVC控制信号发出相应恒定的的无功功率,从而对区域内非STATCOM接入母线起到电压支撑作用。STATCOM参与远方AVC控制后由容抗器将STATCOM的无功出力置换出来,相应的无功置换优化模型如下。
3.3.1 目标函数
目标函数为
(3)


无功置换后的STATCOM无功出力
(4)

为了使STATCOM的无功出力尽可能接近0,即最小化STATCOM无功置换后无功出力的绝对值,最小化|Qs|。其中(D-DIni)TQD表示投切电容电抗可以产生的无功补偿总量。

3.3.2 约束条件
a)STATCOM出力约束。无功置换后STATCOM的无功出力要在其无功出力上下限范围内。
(5)

b)容抗器的投切次数上限约束为
(6)


c)不重复投切约束。为避免求解优化模型的过程中,在相同容量的一组容抗器内可能会出现无用投切的情况,即投入一台又切除一台,对无功置换没有任何贡献,因此需要添加额外约束。例如假设在相同容量的9台电容器中,置换前后的投切状态为:置换前001001001;置换后100111001。两者相减可以得到 -1 0 1 -1 -1 0 0 0 0,相减之后避免同时出现1和-1即可。因此引入约束:

i=1,…,nK,k=1,…,K.
(7)

d)2次投切动作的最小间隔时间约束。设torder为无功指令下发时刻,toper为所有容抗器无功置换前最近的一次动作时刻,tmin为容抗器两次动作之间的最小时间间隔;如果torder-toper≥tmin,即该台容抗器满足最小动作时间限制约束,该台容抗器参与无功置换,可以进行投切操作;如果torder-toper≥tmin,即如果在无功置换指令下发之前的tmin时段内,已经动作,那么在无功置换过程中,该台容抗器不参与无功置换,强制不进行动作。由此引出约束
(8)
实际进行无功置换时,2次投切时间的最小间隔约束可以通过记录各个容抗器动作时刻以及无功指令下发时刻来判断满足投切时间间隔的容抗器,将这些容抗器编号输入到优化模型中,不再将该约束加入到优化模型中。
e)无功置换过程电压约束。在无功置换过程中,因为投切容抗器以及改变STATCOM出力都会对系统电压产生影响,因此需要将STATCOM与容抗器动作可能引起的电压问题考虑在内。

(9)
式中:ΔQs为STATCOM的无功出力变化量;ΔQc为容抗器投切后总的无功出力变化量。
3.3.3 无功置换操作过程
在远方AVC控制模式的无功置换操作过程中,改变STATCOM的无功功率和投切容抗器存在先后次序的问题。求解完成优化模型得到优化控制策略以后,具体实施投切容抗器需要考虑投切过程中是否会引起电压稳定问题。
远方AVC控制模式下的无功置换流程见图4。

图4 远方AVC控制模式下的无功置换流程Fig.4 Reactive power substitution flow chart in remote AVC control mode
4 算例分析
4.1 算例说明
本文使用IEEE 39节点系统进行仿真分析,为了验证STATCOM和容抗器之间的无功置换策略,在Simulink平台上搭建接入±300 Mvar的STATCOM的IEEE 39节点系统仿真模型,发电机、线路和负荷等数据参照文献[19]。文献[20-21]提出了一种基于电压无功控制灵敏度的电网分区方法,将系统内所有无功源出力的改变而引起的各母线电压变化响应趋势相近的节点分为一类,构成同一分区,并在各分区内部选择中枢母线电压控制的对象。分区结果中的一个分区如图5所示,在该分区内,母线7作为区域内变电站,总体容量为±300 Mvar的STATCOM连接在区域母线7,同时在母线7上安装9台40 Mvar并联电容器、3台60 Mvar并联电容器以及9台45 Mvar的电抗器作为可调的离散无功补偿装置。

图5 IEEE 39节点系统和某一分区图Fig.5 IEEE 39 bus system and a partition
母线7在基态潮流下的电压幅值为0.975 2(标幺值,下同),母线8的基态电压为0.975 6。为了验证稳态定电压控制的无功置换策略,在仿真5 s时下发调压需求,要求通过STATCOM的出力使母线7的电压调整为1.000 0;在10 s时模拟母线8发生三相接地短路故障持续0.1 s后故障切除;为了验证在远方AVC控制模式下的调压和无功置换策略,在15 s时母线8出现调压需求,要求将母线8电压调整为1.010 0,主站向STATCOM下发远方AVC指令。整个仿真过程持续25 s。做出假设如下:
a)假设初始容抗器状态均为切除,均可投。
b)容抗器每2次最小投切时间间隔为1 h。因为在仿真5 s时已经下发稳态定电压控制模式下的无功置换策略,会有部分容抗器动作,导致该部分容抗器在远方AVC的无功置换过处于不可投切的状态。
c)每台容抗器最大投切次数设置为10次,每台容抗器的无功置换前的投切次数在[8,10]之间随机产生,在[8,10]之间产生的目的是更好地将容抗器投切次数上限约束考虑在内。
4.2 算例分析
图6展示了连续3个场景下STATCOM在整个仿真时间内的无功出力情况,STATCOM向系统提供感性无功为正。

图6 有无无功置换过程的STATCOM的无功出力Fig.6 Reactive power output of STATCOM with or without reactive power substitution process
在没有无功置换时:5 s时进行母线7的稳态定电压控制,STATCOM容性出力将近220 Mvar,接近额定容量;在10 s时发生故障,STATCOM根据自身的输出特性输出无功;在15 s接收到远方AVC指令后,无功输出增加至290 Mvar,其无功裕度进一步减小。在有STATCOM和电容器之间的无功置换时,5 s时进行母线7的稳态定电压控制,STATCOM设置初始容性上限为45 Mvar,当STATCOM出力达到45 Mvar时,投入一台电容器,依次进行,直到投入5台40 Mvar电容器后,达到稳态调压目的。稳态调压结束后,STATCOM的无功出力为20 Mvar,仍有较大裕度;10 s时发生三相短路故障,STATCOM根据输出特性输出无功;15 s接收到AVC指令后,STATCOM输出130 Mvar无功,达到远方AVC控制目的,根据建立的无功置换优化模型,选择投入两组60 Mvar的电容器进行置换,STATCOM最终出力为10 Mvar。
为了反映STATCOM的容性无功备用情况,引入STATCOM的容性无功备用率Qres,Qres值越大,STATCOM的容性无功备用越大,定义式为
(10)
式中:Qstat为STATCOM的实时无功出力;Qrate为STATCOM的额定容量。
Qstat容性为正,感性为负,0≤Qres≤2,全仿真过程STATCOM的无功备用率Qres的变化如图7所示。
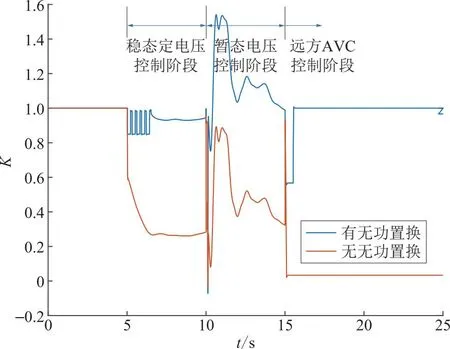
图7 有无无功置换时STATCOM的容性无功备用率Fig.7 Capacitive reactive power reserve rate of STATCOM with or without reactive power substitution


图8 有无无功置换过程的母线7的电压幅值Fig.8 Voltage amplitude of bus 7 with or without reactive substitution process
当投切代价系数Cq分别取值为1、2……6时,相应的电容器动作情况见表2。
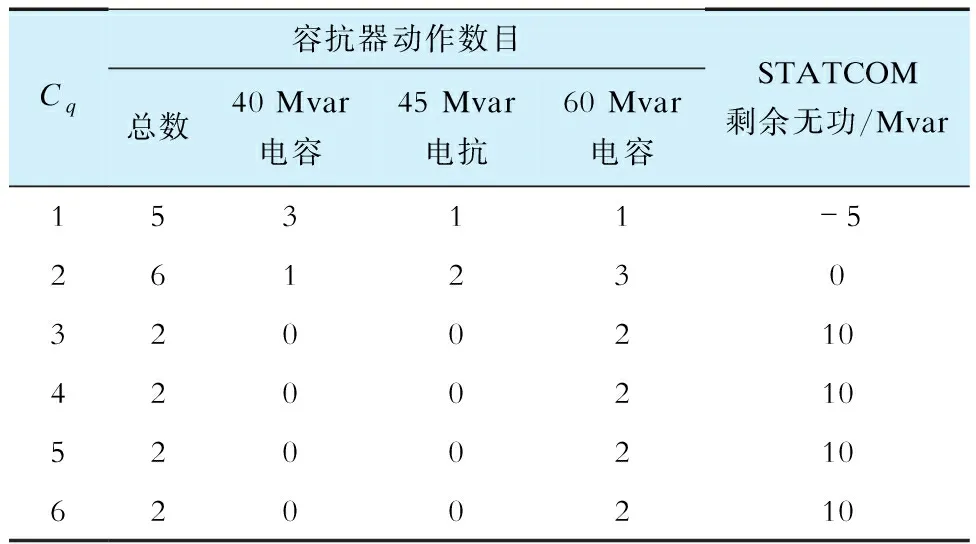
表2 Cq不同取值时无功置换结果Tab.2 Results of reactive power substitution for different Cq values
由表2可以看出:当Cq取值为1或2时,投切代价惩罚设置较小,因此优化结果为通过同时投切电容器和电抗器来使STATCOM无功出力尽可能小,但结果增加了投切次数;当投切代价系数Cq取值不小于3时,无功置换后的动作结果均为投入2台60 Mvar电容器,容抗器的投切次数最少,且STATCOM剩余无功不再增加,投切代价起到了效果,优化结果可以在STATCOM无功出力最小和容抗器动作次数最少2个目标之间取得较均衡的效果。
进一步分析取值合理性,STATCOM最大无功出力为300 Mvar,母线7所连的所有容抗器的平均无功补偿量为45 Mvar/台,因此若要将STATCOM的出力降至0附近,可简单计算需要投入容抗器数量大约为7台。目标函数的第1部分为最小化STATCOM无功置换后剩余无功的绝对值,目标函数第2部分为容抗器投切次数的惩罚项。目标函数两个部分之间的数值差越小,则表明第2部分的惩罚系数设置合理,从而可以避免目标函数的一个部分数值过大另一个部分数值过小,导致惩罚力度过小或者过大,进而出现无功置换后STATCOM的无功出力仍然很大或者容抗器动作次数过多等情况。因此为了避免2个目标之间数量差距太大导致优化结果不合理,认为无功置换后STATCOM出力小于等于20 Mvar比较合适,因此投切代价可设置为20/7,取整为3。实际应用中,可以根据STATCOM安装容量以及站内存在的容抗器的安装容量共同确定罚函数系数的取值。
5 结论
a)对STATCOM接入系统的各种控制模式进行了说明,主要分析稳态定电压控制模式、暂态电压控制模式以及远方AVC控制模式,并研究各自的无功置换策略和数学优化方法。置换策略结果表明,无功置换可以在保证中枢母线或非接入母线电压质量的同时,使系统储备最大的动态无功容量,提高了系统的电压水平及电压稳定性。
b)通过在无功置换优化模型中引入投切代价的罚函数,并分析选取适当的投切代价系数,可以实现通过尽可能少的投切次数来实现无功置换,使投切策略合理。
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
物理之友(2020年12期)2020-07-16 05:39:20
电子制作(2019年22期)2020-01-14 03:16:28
山东冶金(2019年5期)2019-11-16 09:09:38
通信电源技术(2016年6期)2016-04-20 06:21:10
电测与仪表(2016年9期)2016-04-12 00:29:50
电测与仪表(2016年23期)2016-04-12 00:23:00
河南电力(2016年5期)2016-02-06 02:11:35
电测与仪表(2015年9期)2015-04-09 11:59:30
电测与仪表(2015年5期)2015-04-09 11:31:12