基于中和技术理论的机动车不礼让行人动机调查与分析
2024-04-08 08:19文图何庆吕志航
道路交通管理 2024年3期
文图|何庆 吕志航
随着我国经济社会发展、城市规模扩大、机动车保有量不断增长,机动车与行人之间的冲突不断加剧,引起社会广泛关注。在人车冲突中,由于机动车速度高、质量大,行人容易受到伤害。为了保护行人出行安全,持续推进交通安全文明建设,2017 年4月,根据公安部统一部署,全国各地开展了不礼让斑马线行为的整治行动,2018 年,公安部下发《关于进一步加强机动车不礼让斑马线治理工作的指导意见》,推动在全国开展机动车不礼让斑马线治理,建立常态长效治理机制。专项行动取得了良好的效果。但据统计,2019 年,我国发生了24 万起交通事故,其中,1至10 月因不文明驾驶行为导致9656 人死亡,仅未按规定让行行为就造成4661 人死亡、2.7 万余人受伤。2020 年,未按规定让行行为导致的伤亡事故占全国交通伤亡事故总量的12.24%。这表明需要进一步深化机动车不礼让行人行为的治理。
传统上,关于保护行人交通安全的研究主要从道路规划和工程角度出发,考虑区域的建成环境、交叉口环境、行人过街信号灯、出行时间等对行人安全的影响。近年来,随着不礼让行人行为的深入治理,逐步形成一些围绕礼让行人的研究,但均缺乏针对机动车驾驶人本身交通安全意识的分析,无法为开展相关交通安全宣传提供支持。为探索机动车驾驶人不礼让行人的心理动机,本文以犯罪心理学的犯罪中和技术理论为基础,设计调查问卷,调查北京市普通驾驶人不礼让行人的心理动机,从而为治理机动车不礼让行人的违法行为提供参考。
一、调查问卷设计
(一)调查问卷设计依据——中和技术理论
中和技术理论(techniques of neutralization theory)由美国犯罪学家格雷沙姆等1957 年在《中和技术:一种少年犯罪理论》一文中首次提出,其实质是论述犯罪人如何将犯罪行为合理化的一种理论。该理论认为,大多数犯罪人都具有传统的、为社会普遍公认和接受的价值观和态度,故也就不把自身当作犯罪人,并用各种理由来对其违法行为进行辩解,主要包括否认责任、否认损害、否认被害人、谴责谴责者、高度效忠群体、功过相抵和必要性辩解共7 类技能。后来,克洛卡斯、麦诺尔等学者做出进一步改进,将中和技术概括为5 类技能,分别是否定责任、否认伤害、反向谴责、必然狡辩、瑕不掩瑜。
在道路交通安全领域,机动车不礼让行人属于违法行为,并且机动车驾驶人总是会通过各种方法为自身行为进行辩解。本文根据实际情况,选取上述5 个中和技术类型对不礼让行人违法行为进行解释,具体如表1 所示。
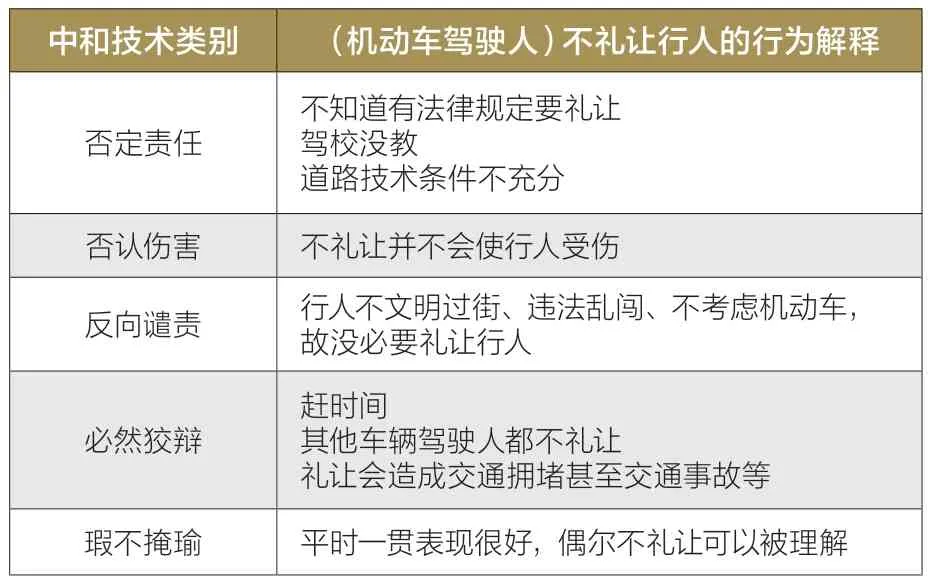
表1 中和技术理论在机动车驾驶人不礼让行人中运用的说明
(二)调查问卷设计结果
根据犯罪中和技术理论的框架进一步设计调查问卷,调查机动车驾驶人不礼让行人的动机。调查问卷分为驾驶人对礼让行人的态度和不礼让的原因两部分,并且对每一个题项采用5 级李克特量表(即要求受测者对一组与测量主题有关的陈述语句表明同意或不同意的程度),表示驾驶人对礼让行为和不礼让原因的认同度。态度选项分别为“反对”“不太认同”“无所谓”“同意”和“赞成”5 项;原因题项的表述如表2 所示,选项分别为“非常不符合”“比较不符合”“一般”“比较符合”“非常符合”。
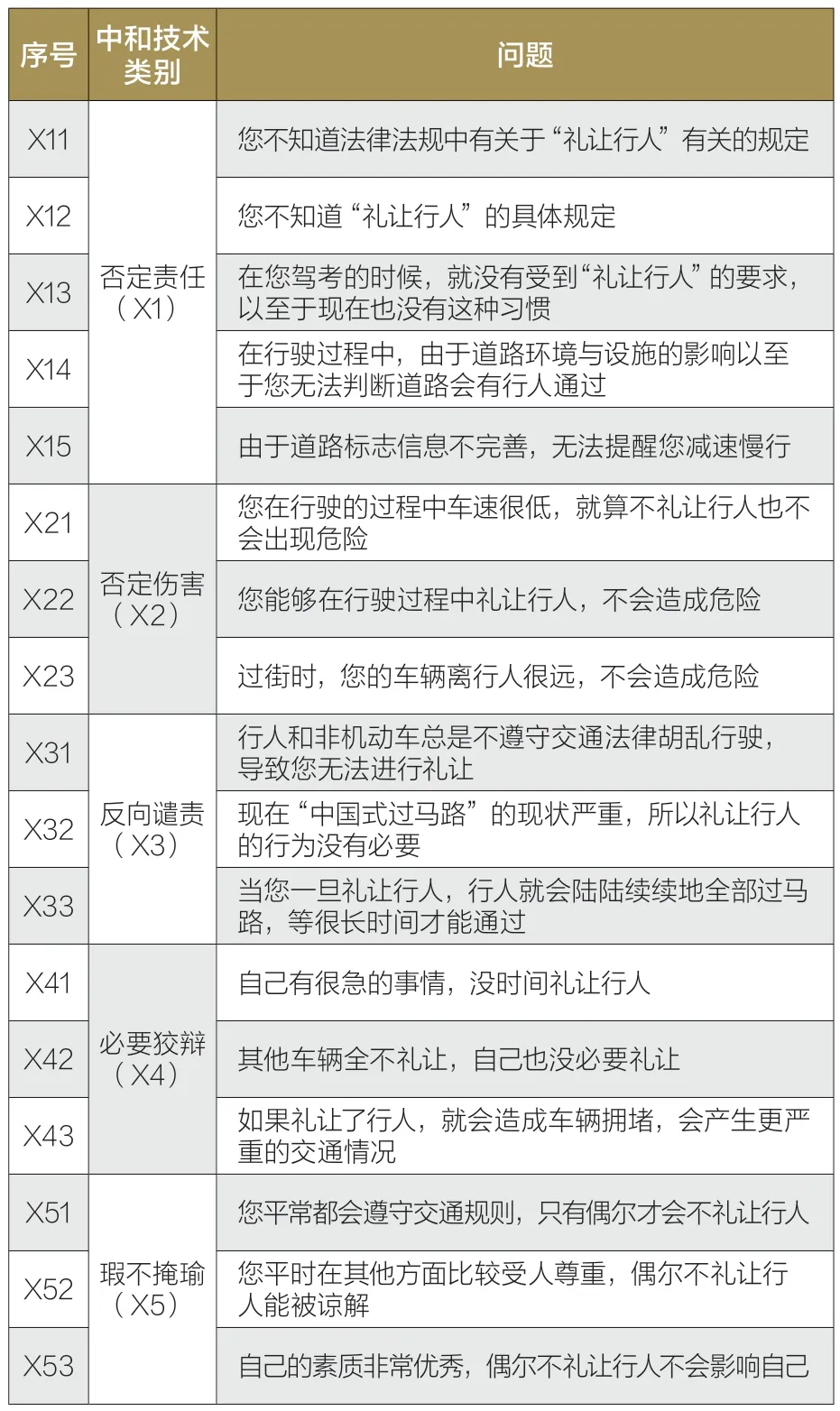
表2 驾驶人不礼让行人的原因调查题项表述
二、问卷调查结果
(一)调查问卷回收情况和检验
本问卷采用线上询问的方式,时间为2023 年11月至12 月,对北京市有过不礼让行为的机动车驾驶人进行问卷调查,共收集问卷211 份,剔除无效问卷5 份,最终得到有效问卷206 份,满足95%置信水平下5%相对误差的样本量要求。利用SPSS 软件对问卷进行信度分析,得到问卷克朗巴哈信度α 系数(检视信度的一种方法,取值范围在0~1,数值越高代表信度越高)为0.884,分量表内部一致性信度系数在0.7以上,说明该问卷具有较高的可信度。
(二)数据的预处理
根据问卷调查结果,使用公式对各项原因分值进行统计。
各项原因分值计算如下:
式(1)中,mj表示该项目的平均计分值;Mij为第i个受访驾驶人对不礼让行人描述的第j种原因的认同度所对应的分值;n为调查样本数。
若是正值,则表示该项描述的原因整体上比较符合驾驶人的主观原因,若为负值,则表示驾驶人整体上不认同该项描述的原因。分值越高,驾驶人对该项原因的认同度越高。
各项中和技术的分值计算如下:
式(2)中,u表示该项中和技术的平均分值;k表示中和技术的表征项数。u越大,说明驾驶人在不礼让行人的违法行为中运用该项中和技术的程度越高。
三、基于调查结果的动机分析
(一)驾驶人对礼让行人的态度
根据调查问卷结果,统计北京市驾驶人对“礼让行人”的态度如图1 所示。

图1 驾驶人对礼让行人的态度
由图1 可知,在所调查的驾驶人群体中,对于“礼让行人”,91%的驾驶人持赞成和同意的态度,仅有约4%持不认同和反对的态度,符合中和技术理论中“大多数犯罪人拥有与常人一样的价值观”的观点。
(二)不礼让行人的中和技术分析
对北京市驾驶人不礼让行人行为的各项中和技术分值进行统计,结果如图2 所示。
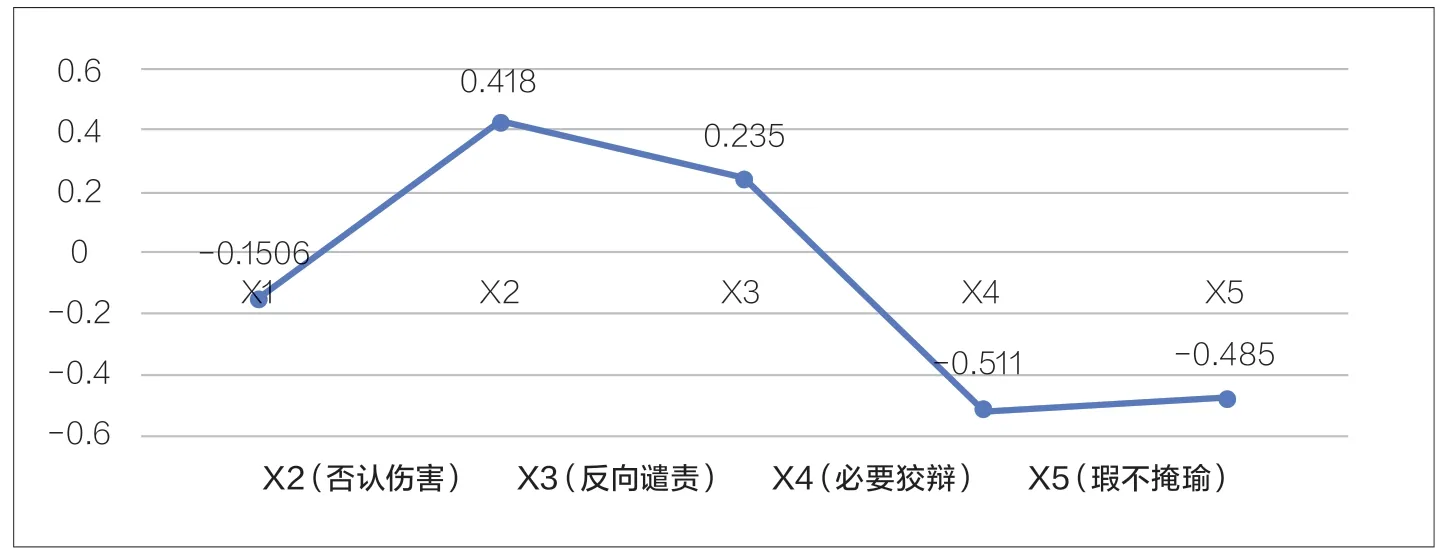
图2 驾驶人不礼让行人的中和技术统计
从图2 可以看出,在各项中和技术的分值排序中,X2(否认伤害)>X3(反向谴责)>X1(否认责任)>X5(瑕不掩瑜)>X4(必要狡辩)。
在各项中和技术中,X2(否认伤害)和X3(反向谴责)得分较高,远大于0,是驾驶人不礼让行人的主要动机。其中,X2(否认伤害)得分较高,表明大部分驾驶人虽然认为不礼行人是不正确行为,但相信自己不会对行人造成伤害,反映出驾驶人对于自身驾驶技术的盲目自信,低估不礼让行人的危险性。X3(反向谴责)得分较高,表明驾驶人认为是行人和非机动车的不文明行为导致自己无法礼让行人。
结合X3(反向谴责)的得分来分析X1(否定责任)的内涵,X1(否定责任)得分接近0,表明大部分驾驶人认为自己已经履行了驾驶责任。
X4(必要狡辩)和X5(瑕不掩瑜)得分较低,说明驾驶人不会从必要性和道德性两个方面来为自己的行为开脱,表明大部分驾驶人具有规则意识。
(三)不礼让行人的行为影响因素分析
进一步对问卷中各项原因分值进行统计,其结果如图3 所示。
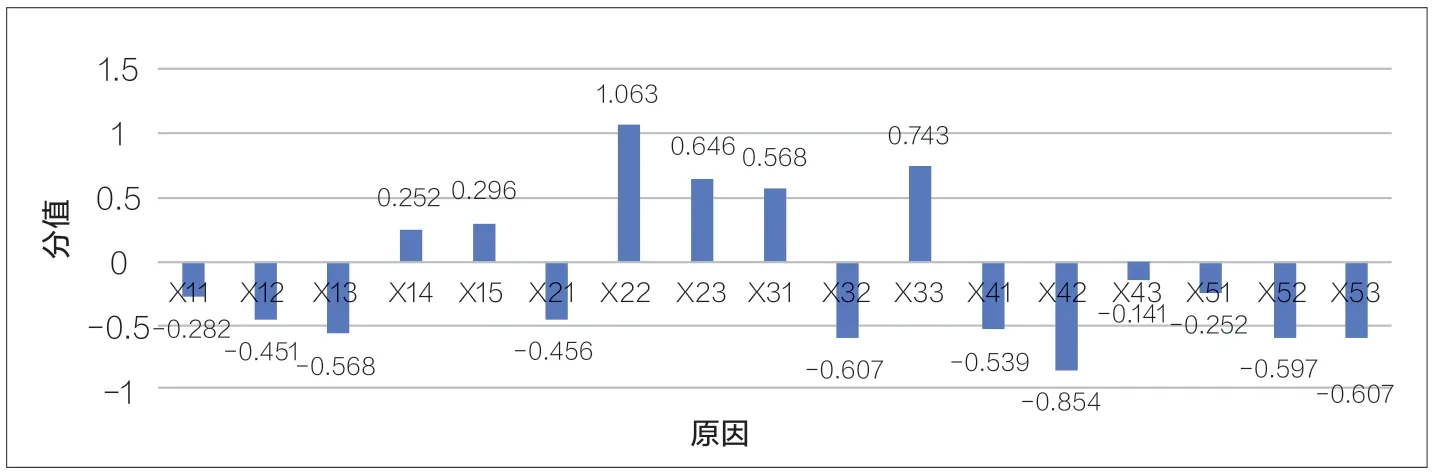
图3 各项原因符合程度的分值
由图3 可知,所有原因项的平均分值分布比较接近于[-1,1]的区间范围内,说明在北京市,驾驶人对调查表中所列举的各项不礼让行人、原因的主观认可度整体上处于“比较不符合”与“比较符合”相近的程度,即没有极端严重的原因。
在各项原因中,X22(行驶中能够礼让行人)和X33(行人陆续过街缓慢)得分较高,X23(离行人很远)和X31(行人和非机动车乱闯)得分次之,表明驾驶人认为人车冲突的责任在于行人和非机动车一方,而自己有信心能够处理好人车冲突。X14(视距视线不佳)、X15(标志标线的礼让信息提醒不够)两项得分也为正值,表明超过一半的驾驶人对行人过街处的环境和交通工程设备不太满意。
除上述6 项原因外,其他得分项均低于0 分。其中较为突出的是X42(别人不礼让自己也不礼让),分数值较接近-1,说明在礼让行人方面,绝大部分驾驶人都具有道德自觉性,并不受到他人的影响。而X13(驾考时没有要求)、X32(行人“中国式过马路”现象太严重得不到约束,所以没必要礼让)、X52(因为其他方面的宝贵品质,偶尔不礼让可以原谅)、X53(个人素养很好,偶然可以不礼让无所谓)得分较低,表明对上述原因认同度较差。根据得分位于[-0.5,0] 的原因项,部分驾驶人还会以X11(不知道法律法规上有礼让行人的规定)、X12(不知道礼让行人的具体规定)、X21(在行驶的过程中车辆的速度很低,就算不礼让行人也不会出现危险)、X43(如果礼让了行人,就会造成车辆拥堵,会产生更严重的交通情况)、X51(平常都会遵守交通规则,只有偶尔才会不礼让行人)等原因做出自我辩护。
四、结论
从调查结果来看,北京市机动车不避让行人的主要原因在于驾驶人对自身驾驶技术的自信;驾驶人有一定道德自觉性而不会采用瑕不掩瑜和必要狡辩来推脱自身的责任,但认为道路交通设备不足及行人违法是造成人车冲突的原因。
基于调查结果,首先应该提升行人过街交通组织的精细化水平,给予机动车驾驶人清晰的交通信号,避免误判,使其驾驶技术自信转化为高质量的驾驶表现。其次,要进一步分析人车冲突的驾驶风险点,及时开展相关交通安全宣传,避免驾驶人盲目自信。
猜你喜欢
公民与法治(2022年7期)2022-07-22
中国特种设备安全(2022年1期)2022-04-26
世界科学技术-中医药现代化(2021年7期)2021-11-04
意林(2021年5期)2021-04-18
扬子江(2019年1期)2019-03-08
电子制作(2019年24期)2019-02-23
小天使·一年级语数英综合(2017年6期)2017-06-07
管理现代化(2016年6期)2016-01-23
听力学及言语疾病杂志(2015年5期)2015-12-24
中国康复理论与实践(2015年7期)2015-05-09