铁路无人化牵引变电所智能巡检系统研发与应用研究
2024-04-02 08:10中铁上海设计院集团有限公司郑伟军
电力设备管理 2024年3期
中铁上海设计院集团有限公司 郑伟军
牵引变电所是现代铁路电力系统中的核心部分,用于对市政电网三相220kV交流电进行转换,以驱动电力机车快速稳定运行。但需要注意的是,铁路电力系统运行时,牵引变电所可能受到环境、线路自身等因素的影响而出现故障,严重干扰电力机车的运行,因而需要采取合理的方式对牵引变电所进行巡检。传统人工巡检时,效率低且受到人工主观因素的影响,无法准确寻找出牵引变电所中出现的故障。基于此,设计一种无人化牵引变电所智能巡检系统,以此为进一步提升铁路牵引变电所巡检效果提供帮助。
1 总体设计
现代铁路领域共有3种无人化牵引变电所巡视方法,分别为轮式机器人、导轨式机器人与视频摄像头,每种方法具有不同特点,适用于不同场合,需要根据牵引变电所现场巡视点分布情况、室内外设备分布情况、系统后续扩展情况等因素,选择最佳的巡视方法。其中,牵引变电所巡视点众多,分布较为分散,需要布置大量摄像头,且后续扩展难度较大,因而不适用于视频摄像头巡视方法。在牵引变电所室内,设备布置较为整齐与规律,巡视点较为集中,通过导轨式机器人可以快速准确完成巡视工作,但铺设轨道较长,轨道数量众多,同时增加现场工作危险性,因而也不适用于无人化牵引变电所智能巡视要求[1]。
本文设计中选择了轮式机器人,系统总体结构如图1所示。其中共包含两大模块:一是机器人模块。为现场设备巡视设备,对牵引变电所内部设备的温度、运行状态予以检测,并将检测结果传输给调度站;二是调度站。用于完成整个系统控制与调度相关工作,其主要包含4个功能:3D可视化系统。通过机器人采集数据的分析与计算,构建牵引变电所现场3D模型,以清晰、直观将现场情况显示出来;供电段生产调度系统联通。用于自动输送各设备模型相关信息,提升设备信息管理效果;牵引供电远动系统联通。用于自动对设备模型予以调节,以提升设备模型的准确性;视频监控系统集成。用于对视频系统升级,促进牵引变电所设备巡视数据交换与控制效果。
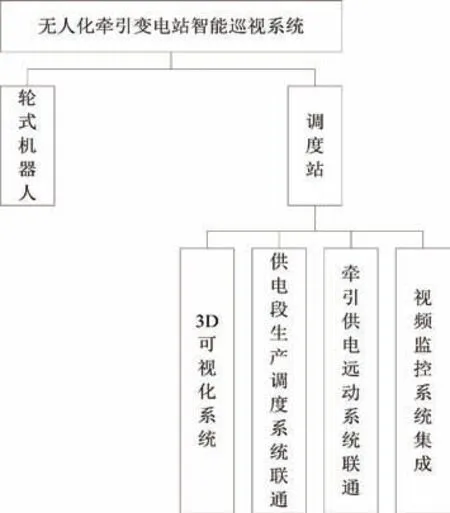
图1 铁路无人化牵引变电所智能巡视系统总体结构图
2 功能详细设计
2.1 机器人功能
机器人。本文设计选择轮式机器人,主要包括:一是机箱。用于对其他各功能模块进行固定;二是激光传感器。用于对作业现场的扫描,并根据扫描结果建立现场地图,以此对机器人运行进行导航;三是云台。选择的是全向云台,可360°旋转,用于调节摄像头、测温元件的方向;四是摄像头。用于对变电所内部设备运行状态及周边环境的拍摄,以此判断变电所运行情况是否符合规定要求;五是壁障传感器。用于判断机器人移动线路上是否出现障碍物;六是红外测温元件。用于对环境温度的检测,判断牵引变电所环境温度是否异常[2]。其中,摄像头与红外测温元件为核心模块,直接关系到整个智能巡检系统的应用情况,针对牵引变电所智能巡视要求,应按照表1参数对两模块进行配置。

表1 智能巡视系统摄像头与红外测温元件主要参数表
充电房。用于为机器人充电与存放,以使机器人正常运行。充电房整体框架为镀锌钢管,外部分别铺设一层防腐材料、防水材料等,用于机器人的保护,防止充电房潮湿而增加机器人损坏概率。充电房内主要设备包括:空调。用于调节房内温度,防止房内温度过高或过低而导致机器人损坏;充电桩。用于向机器人充电,其中共包含多种充电模式,如自主触头连续充电、手动连接车体充电孔充电、手动直接连接电池充电等,操作人员可根据实际情况而选择不同的充电方式;专用配电箱。用于安装、固定相关电气设备。通信模块。用于系统内部数据的传输,针对机器人作业特点,选择的是以太网无线通信模式,各机器人与基站内均安装一个无线通信芯片,并在芯片内分别录入独立的IP地址,机器人运行时,自动将其与基站进行连接,并完成信息进行传输,通过基站内部的查询,判断设备间通信状态是否出现异常。
2.2 调度站功能
2.2.1 3D可视化系统
随着牵引变电所设备数量的不断增加,内部结构越来越复杂,传统二维图像难以直观、准确显示出牵引变电所实际情况。为了提升变电所内部情况显示情况,设计了3D可视化系统。3D图像可视化过程主要由3个阶段构成。确定建模对象。根据现场设备情况,结合智能巡检系统运行要求,主要建模对象包括:地理位置、杆塔外观、排水沟等现场基本情况;控制室、检修室、集油池等内部建筑情况;牵引变压器、断路器、互感器、避雷装置等内部设备情况等。而二次电缆无需建模,以降低建模工作量。
模型构建。先构建出牵引变电所的整体模型,即通过机器人中的3D激光扫描仪对现场情况的采集,通过计算与分析后,自动得到变电所的点云图,之后以此为基础,通过OSG软件予以渲染,以此构建出整体模型。构建出变电所整体模型后,以CAD软件为主要工具分别构建各设备与建筑的模型,并通过OSG软件予以渲染。
模型展示。以C++语言为主要工具,结合B/S框架技术等,开发模型显示模块,在保证模型显示需求的同时,减少硬件使用,节约系统开发投入。模型展示界面当中,主要功能包括各设备、建筑物、环境模型的展示、缩放与拖动,以便工作人员根据实际需求准确对模型进行查看。模型显示过程中,先通过对模型属性的分析,去除那些无用或应用价值较低的数据,以此对模型进行优化,使模型更加精简,为模型加载提供支持。之后,利用具有加载功能的中间层对模型进行加载,将模型基本信息与连接传输给系统,这样虽然加载操作较为烦琐,但无须大量数据支持,显著提升模型加载效率,降低系统对调度站硬件设备的要求[3]。
2.2.2 供电段生产调度系统联通
构建出3D可视化系统后,系统中将会出现很多模型,若只有模型,将会影响模型的显示效果,因而应在设备模型中添加相应的参数信息。若采用传统人工输入模型,不仅需要投入大量实践,增加相关工作人员的工作量,而且还容易受到人员主观因素的影响而降低输入信息准确性。同时,供电段生产调度系统运行时,内部将会生成大量设备信息与运维管理信息等。所以,为了将所有模型信息直观显示出来,应将3D可视化系统与供电段生产调度系统进行联通。当生产端调度系统获得设备基础信息与运维管理信息后,自动将这些信息传输给3D模型,3D模型以此为基础,进一步对模型进行优化与丰富,从而提升模型的显示效果,为牵引变电所调度管理提供支持。
该功能设计与实现时,为提升调度系统运行的稳定性,3D可视化系统与供电段生产调度系统联通运行时,只可对信息进行读取,禁止对信息予以修改。此外,为了确保系统顺畅运行,在3D可视化系统内部,构建出相应的暂存数据库,以对调度系统信息的整理以筛选,去除那些无用的信息,以提升系统联通运行效率,其主要结构如图2所示。
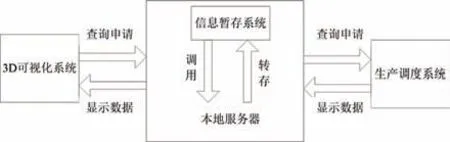
图2 供电段生产调度系统联通结构图
2.2.3 牵引供电远动系统联通
牵引变电所工作过程中,操作较为频繁,设备不断轮换,使得开关位置经常出现改变,为了提升模型与设备工作情况的一致性,应将3D可视化系统与牵引供电远动系统进行联动。远动系统是牵引变电所管理系统中的重要组成部分,用于对供电设备进行监控与调节,对整个铁路系统的运行具有重要意义。所以,现代铁路领域发展过程中,已将牵引供电远动系统连接到铁路关键信息系统内。
远动系统运行时,为了提升系统运行稳定性,防止对整个铁路系统运行带来较大干扰,3D可视化系统与牵引供电远动系统联动时,采用单向通信模式,即远动系统生成遥信变位等报文信息后,直接传输给3D可视化系统,可视化系统以此为基础,动态对设备模型予以调节。但3D可视化系统禁止向远动系统传输信息或指令,以免干扰远动系统的运行。与此同时,在两系统之间,安装一套性能良好的防护系统,用于对两系统传输数据的监控与保护,防止不良信息传输到远动系统而影响整个系统运行的安全性与稳定性。此外,为了提升两系统通信安全性,也应构建暂存数据库(如图3所示)。

图3 牵引供电远动系统联通结构图
2.2.4 视频监控系统集成
现代铁路信息管理建设时,已经建立了远动功能和视频监控功能,通过这些系统的应用,在一定程度上提升铁路管理效果,但现有功能较为滞后,不符合现代铁路信息化管理要求。为此,在牵引变电所智能巡视系统中,应对视频监控系统进行补强与集成,即增加多种摄像头画面调节方式:点击相应的设备模型,利用本系统与视频监控系统之间的联动,自动优化摄像头参数;在3D可视化系统内,点击摄像头模型,以此显示相应的画面信息;直接利用摄像头内的列表获得画面。
3 工程现场验证
按照上述内容对智能巡视系统进行设计与开发,并应用到某铁路牵引变电所内,通过该变电所对系统应用情况的观察,判断系统实际应用效果,其中巡视点681个,分合区域39个,仪表读数区域48个,红外测温区域328个,其他区域266个。通过现场验证观察可发现,在机器人方面,整个现场巡视时间在90~110min范围内,远低于人工巡视的150min,且巡视内容更加详细;在调度站功能方面,系统可构建并动态调节3D模型,真实、准确显示出变电所设备运行状态。
综上,某现代铁路牵引变电所信息化管理系统建设时,开发出一套集轮式机器人、3D可视化系统、供电段生产调度系统联通、牵引供电远动系统联通、视频监控系统集成为一体的智能化巡视系统,以加强对变电所内部设备的巡视与检查,使相关工作人员准确了解内部设备运行情况,为提升整个变电所设备运行安全性与稳定性提供有力支持。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
智能建筑电气技术(2021年6期)2021-03-28
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
汽车与新动力(2019年5期)2019-11-07
电子测试(2018年13期)2018-09-26
海峡科技与产业(2016年3期)2016-05-17
电子器件(2015年5期)2015-12-29
电源技术(2015年5期)2015-08-22