
变电站智能化巡检系统的研究和应用
2024-04-01 04:11蓝丽丽廖建波
电气技术与经济 2024年3期
蓝丽丽 廖建波
(广西电网公司柳州供电局)
0 引言
目前,国内大部分变电站仍然沿用人工巡检的检修模式,由于巡检作业中工作人员所处外界环境较差加之工作强度大,造成巡检工作整体效率不高。此外,巡检人员技能水平参差不齐,在检查作业中所找到的故障点也不相同,且很难将检测数据一一有效录入信息系统中,造成巡检结果缺乏客观准确性。
随着变电站功能的不断强大,巡检项点逐渐增加,巡检步骤也变得更为复杂。且在某些地区因其地理特点,环境会更加恶劣,变电站工作的安全风险将更大。传统的人工巡检已经不能满足多样化的巡检任务和恶劣的外界环境,因此,在变电站日常巡检作业中引入智能化的巡检技术刻不容缓。而采用人工智能技术的移动机器人系统逐渐进入大众的视野,该机器人能够适应外界恶劣的环境,完成多种巡检作业,护航变电站正常运行。
1 智能化巡检系统整体框架
智能巡检机器人是变电站实现智能化检测的主要设备,由巡检机器人后台监控系统和巡检机器人移动站组成,其整体框架如图1所示。
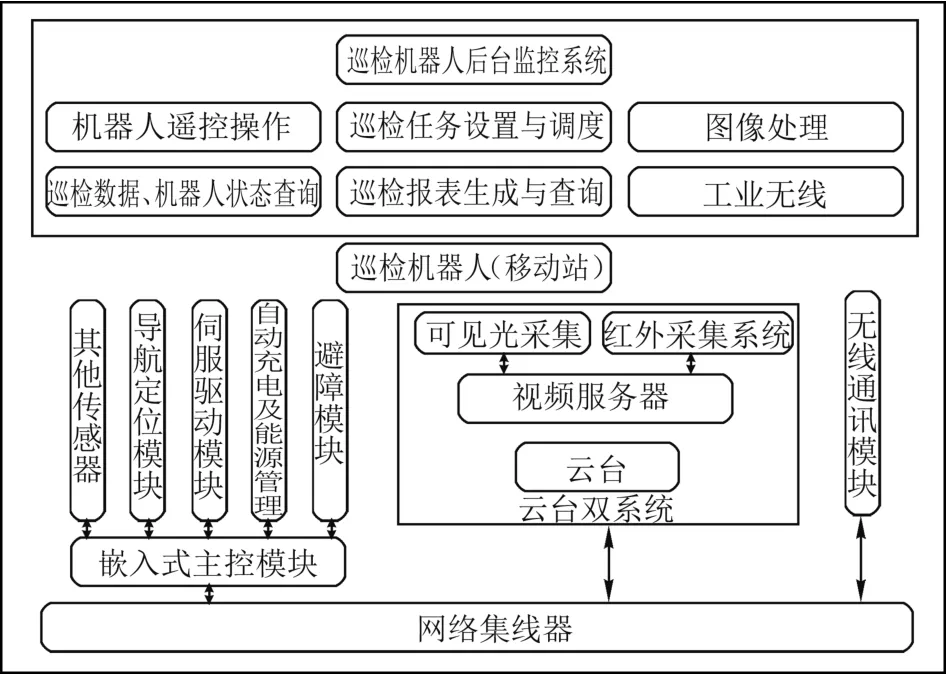
图1 智能化巡检系统整体框架
变电站智能化巡检系统的重心为移动机器人,其主要由主控模块、云台双系统及无线通讯模块组成。其中,主控模块采用嵌入式安装在移动机器人系统的网络集线器上,主要包含导航定位模块、伺服驱动模块、自动充电以及能源管理模块、避障模块和其他传感器等部分;云台双系统主要包含红外采集模块、可见光采集模块及视频服务器等,是整个移动机器人系统的“眼睛”,监视变电站外界环境的变化[1]。总之,移动机器人系统具备多元化的巡检方法、智能化的任务执行模式、系统融合度高、适应性强等特点,是执行各种巡检作业的主体,采用地面巡检的模式对变电站高压场地、相关测量仪表、电气端子箱、隔离开关分合状态等变电站的各运转情况进行全面检测。
移动机器人系统主要具有以下特点[2]:
(1)拥有隔离开关分合、红外线测温和表计读数等多种巡检工作模式,比较贴合变电站现场实际工作情况,实用性较强,覆盖面广,较好地满足了变电站日常工作中运行及维护保养的相关需求。
(2)根据每次巡检任务的实际情况,红外采集系统能够进行自动启停,增加其使用寿命,减缓设备衰老进度。
(3)可辅助工作人员进行风险等级较高的倒闸作业操作。
2 智能巡检机器人主要硬件选型
2.1 主控模块
移动机器人系统的控制核心为主控模块,其控制整个机器人全部的执行动作。为更好确保机器人动作的精准性,本文选取HIPC-1910L型工控机,配置双电源输入、10GB内存和36GB闪存。主控模块采用常见的Windows操作系统,可以与多种I/O接口进行匹配。此外,工控机还配置三十六路输入模块、控制器局域网通讯接口控制卡、三极管集电极十六通道输出模块,进一步接受激光、红外线等各种传感器信息,且工控机还增设电压检测单元,实时对巡检移动机器人电池的工作电量进行监测。
2.2 自动引导运输车
自动引导运输车不需要人工驾驶,可以自主进行无人避障。常见的引导车有:磁引导运输车、视觉引导运输车以及激光引导运输车[3]。磁引导车的技术成熟,价格便宜,运行前在地面上敷设磁条;后两种造价偏高,且对外界环境的要求苛刻,本文移动机器人的巡检路线比较固定,所以采用磁引导运输车,考虑到本文磁引导运输车的主要作用是载运检测设备并无牵引作用,故最终选用背压式磁引导运输车。
2.3 驱动模块
变电站作业场所大多在室外,道路较为曲折,故移动机器人行进的速度不能太高,但运行扭矩及精度控制要求较高,移动机器人的旋转电机主要是控制摄像机的旋转角度,需要较好的定位精度,而步进电机具有控制精度较高、抗干扰能力强、运行可靠等优点,因此选用步进电机;因移动机器人为直流驱动,故其执行单元采用直流伺服电机。此外,为了避免失电状态下检测设备跌落,导致设备损坏,系统电机均需具备抱闸功能。
2.4 传感器
移动机器人感知外界环境离不开传感器,机器人自身安装了多种传感器,其中,可见光传感器可以对电气设备外观和相关电子仪表数据进行读取,热成像传感器可以对变电站高压设备进行实时温度监测,尤其是各种高压接头处的温度,一旦损坏对系统的影响程度较大。此外,移动机器人为了快速测量周围环境和自身之间的距离,配置六台超声波传感器,充分保护机器人运行过程中的安全,避免与障碍物发生撞击。同时,移动机器人前后均安装有避免跌落和撞击的感应装置,确保移动机器人在遇到障碍物时能够停止行走。
2.5 云台系统
移动机器人的云台系统中红外摄像机选取NCC-4700JX12型800万像素红外网络摄像机;可见光摄像机选用C62L25T100AH型一体化摄像机,具有背光补偿、镜头变焦、电子快门等功能,可以进行远距离监控,适合不同的时间段和不同的天气段运行,满足变电站全天候监控的需要。
3 智能巡检机器人软件设计
3.1 智能巡检机器人软件控制模块
移动机器人软件控制模块可以对移动目标进行检测,远程控制机器人运动及云台摄像机动作等。这些动作可以通过键盘按钮来进行,在键盘当中设定某些快捷键来完成云台系统复位、停止、前进、后退等方向操作,易于操作、方便维护。其控制模块的框架如图2所示。移动机器人的行进路线通过路径规划模块传输到控制保障系统中,控制保障系统利用无线网络实现与移动站系统的通讯连接,此外,也可以通过手动控制模块对移动机器人巡检情况进行设置。
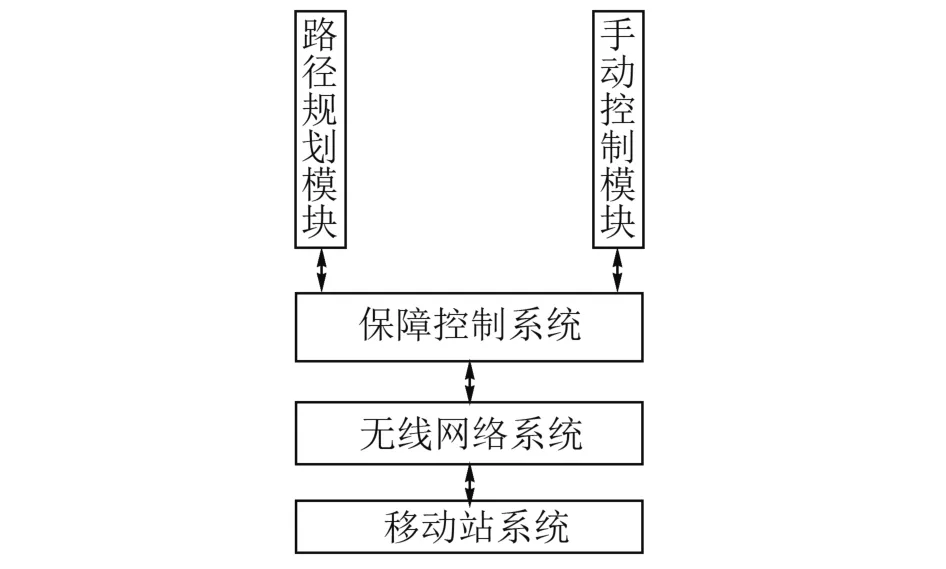
图2 移动机器人控制模块框架
3.2 智能巡检机器人报警输出模块
日常使用过程中,可见光摄像机和红外摄像机可实时采集机器人前方区域的图像数据,同时利用超声波传感器感知周围环境,并实时将数据传输至主控模块HIPC-1910L进行分析和比对,主控模块HIPC-1910L可将传入的数据进行综合计算,一旦发现数据异常,移动站将启动报警程序,对异常数据进行采集后通过无线网络模块将其输送至报警模块,报警输出流程的框架图如图3所示。
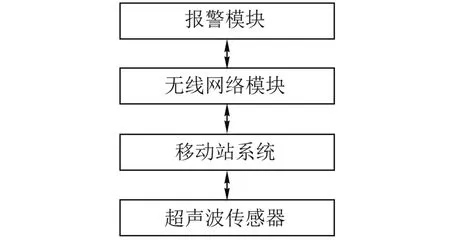
图3 移动机器人报警输出流程
为了保证报警信息传递的时效性,该系统选用api作为底层逻辑的表达函数,并对异常信息按照优先级及影响程度做排序处理,实现报警信息的分类,以便故障发生的第一时间内工作人员可以有针对性地处理解决。
3.3 智能巡检机器人导航定位系统
在移动机器人的导航定位系统工作过程中,机器人在行进途中,一旦超声波传感器检测到有物体存在时,其运行速度会逐渐降低,直至停止前行,等障碍物被处理掉后,继续前进[4]。导航定位系统主要应用的是蚁群算法,其主要数学模型如式(1)所示:
式中,指任意t时刻蚂蚁从巡检路线i处走到j处的概率;指任意t时刻信息素数量值;α、β分别指信息素及期望的启发因子;ηij指的是i与j点的期望度。
4 移动机器人巡检系统的应用
移动机器人巡检工作图如图4所示,移动机器人巡检时可以利用可见光摄像机对变电站电子仪表类进行识别,读取数据,并拍照留存,然后输出相应的数据报表供工作人员查看[5]。个别电子仪表因为自身表头朝向及安装位置等原因,可能无法被摄像机准确检测或识别。

图4 机器人巡检工作图
移动机器人利用红外摄像机进行测温时,通过云台系统与各位置传感器的配合使用,令移动机器人停留在合理的拍照点位迅速对目标设备进行拍摄,从而为工作人员提供详实的设备温度图谱,以便后续的故障分析。
通过实地考察,移动机器人获取的六氟化硫气压表读数、红外摄像机测量温度和系统泄漏电流等参数都与实际测量数据相差不大,个别数据的误差也在规定范围内,具有较高的检测准确性。
4.1 系统及时性分析
移动机器人所采集的动态数据借助无线网络传送到后台控制中心,且工作人员可以实时查看系统数据,通过对比历史数据,判断采集到的工作数据是否在正常区间内,如发现异常应及时对电气设备进行干预。
根据现场使用反馈,移动巡检机器人可以准确高效完成高压电力设备工作温度的检测,变电站工作人员不用亲自到场检查高压部件,保障了检修人员生命安全的同时也提高了作业效率,检修人员能够实时查看红外相机生成的温度曲线,一旦发现温度曲线剧烈变化时立即报警,通知检修人员及时到场进行处理,使设备故障及时得到解决。
4.2 系统效益分析
目前,多数变电站实行无人值守模式,且变电站的工作量日益增多。使用该移动机器人使用在现场进行巡检作业后,一方面降低了工作人员的作业量,另一方面也减小了工作人员因粗心大意而造成的设备故障隐患发生的概率,充分保障了变电站安全可靠运行,使工作人员的精力可以投入到其他生产工作中。
移动巡检机器人代替工作人员进行例行巡检,在保证电气设备的高效巡检的同时又能降低人力成本。
变电站移动机器人投入使用后,多次发现高压设备温度过高现象并及时预警,避免了危险事故的发生频次,在一定程度上间接提高了变电站系统运营维护的经济效益。
5 结束语
本文在介绍国内变电站巡检模式的基础上,首先对智能化巡检系统的整体框架进行了搭建,然后对巡检机器人主控模块、自动引导运输车、驱动模块、传感器、云台系统等主要硬件进行了选型,接着对巡检机器人的软件模块进行了相关设计,最后对移动机器人在变电站实际巡检工作中的应用进行了讨论,有力保障了变电站设备运行可靠性,提高了工作效率,推动了电力行业健康发展。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
北京航空航天大学学报(2022年6期)2022-07-02
摄影之友(影像视觉)(2020年2期)2021-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年23期)2019-02-23
制造技术与机床(2017年3期)2017-06-23
专用汽车(2016年9期)2016-03-01
专用汽车(2016年4期)2016-03-01
专用汽车(2015年1期)2015-03-01
