地基引力波探测激光干涉仪的真空残余气体噪声分析*
2024-04-01 08:01郭禧庆周静王晨曦秦琛郭成哲李刚2张鹏飞2张天才2
物理学报 2024年5期
郭禧庆 周静 王晨曦 秦琛 郭成哲 李刚2) 张鹏飞2)† 张天才2)
1) (山西大学光电研究所,量子光学与光量子器件国家重点实验室,太原 030006)
2) (山西大学,极端光学省部共建协同创新中心,太原 030006)
引力波是时空弯曲产生的涟漪波动.引力波探测对促进人类认识自然和科学技术进步均具有深远意义.由于引力波信号非常微弱,地基引力波探测器需要超高真空环境来保证激光干涉仪的稳定运行.本文阐述了残余气体噪声对地基引力波探测装置灵敏度的影响,并从第三代地基引力波探测原型机和全尺寸装置的真空系统设计出发,通过理论分析和模拟,给出真空系统压强、环境温度、残余气体质量和种类、测试质量的曲率半径等因素对引力波探测灵敏度的影响.这为引力波探测原型机和全尺寸装置的真空系统设计和建设提供了重要的理论依据.
1 引言
引力波是大质量天体周期快速运动造成时空弯曲并携带能量在宇宙中传输的时空涟漪.2015 年9 月14 日5 时51 分,美国的激光干涉引力波天文台(LIGO)在路易斯安那州和华盛顿州的两个探测器几乎同时探测到了一个微弱的信号,时间前后相差7 ms,这个时间差和光在这两个探测器之间传输的时间一致,这标志着人类首次探测到了引力波[1].此后,欧洲处女座(Virgo)引力波探测器加入引力波探测中.2017 年10 月,LIGO和Virgo 共同探测到来自两个中子星并合的引力波信号[2],这一研究成果获取了更多中子星碰撞信息.这些重大科学发现不仅证实了爱因斯坦相对论的预测,而且有助于更深入地研究黑洞、中子星等宇宙天体[3].引力波探测是区别于电磁场探测的天文测量手段,是利用全新的视角来观测宇宙,标志着引力波天文学进入了崭新的时代,为未来的宇宙研究提供了新的机遇和挑战.
与此同时,引力波探测器的不断升级和优化不仅提供了全新的宇宙测量手段,而且还将促进真空、先进激光、精密控制、量子光源、数据处理等各相关领域的发展,对提升我国压缩光、隔震系统和真空系统设计的技术水平具有重要意义[4].以激光干涉仪为原理的地基大型引力波探测器中,第一代包括英国的Glasgow 原型机(10 m)[5]、澳大利亚的Gingin 原型机(80 m)[6]、日本东京的TAMA(300 m)[7]、德国汉诺威的AEI 原型机(10 m)[8]和GEO(600 m)[9]、意大利比萨的Virgo(3 km)[10]、美国的LIGO 原型机(40 m)[11]和LIGO(4 km)等.第二代引力波探测器包括美国的Advanced LIGO[12]、意大利的Advanced Virgo[13]、德国的GEO-HF[14]和日本的KAGRA[15]等.规划中的第三代探测器包括美国Cosmic Explorer(40 km,CE)[16]和欧洲的爱因斯坦望远镜Einstein Telescope(10 km,ET)[17]等,预计这些探测器的性能将进一步提高.此外,国外的空间引力波探测计划包括欧洲的激光干涉仪空间天线ELISA[18]、日本的太空引力波天线DECIGO[19]、日本和美国合作的空间微透镜天文台MIOS[20]等.国内地面的引力波探测器主要包括北京师范大学的“引力波与宇宙学实验室”在建的原型机(10 m)[21]和山西大学建设的地基引力波探测器原型机(20 m).此外,国内空间引力波探测计划还包括在建的“天琴计划”[22]和“太极计划”[23].
空间引力波探测器优势在于天然的真空环境,可有效减少地面的多种干扰因素,如地质变化、人为活动、气体流动等.相比太空项目,地基引力波探测装置的优势在于便于维护和升级.但是建造大型地基引力波探测装置的过程需要考虑影响干涉仪灵敏度的各种噪声,主要包括量子噪声(quantum noise)[24]、测试质量热噪声(test mass thermal noise)[25]、悬挂热噪声(Suspension thermal noise)[26]、引力梯度噪声(gravity gradients noise)[27]、残余气体噪声(residual gas noise)[28]、牛顿噪声(Newtonian noise)[29]等.提高探测器灵敏度需要不断抑制探测器的各种噪声,这样才能从干涉仪产生的细微变化中确认出真实的引力波信号[30].其中残余气体噪声是影响干涉仪探测灵敏度的重要因素之一,因此需要建立真空系统保护地基引力波探测装置中的激光干涉仪免受气体流动的影响.气体粒子穿越激光光束会产生光的相位噪声,从而降低干涉仪灵敏度.此外,气体粒子随机撞击镜面会导致对镜面上产生分布不均的光力作用从而降低引力波探测器灵敏度[31].因此,良好的真空系统可有效降低气体粒子噪声.探测器中的测试质量、光学器件、隔震系统均需置于真空度较高的真空系统.真空系统有效地保障了光束传播的稳定性,为探测灵敏度的优化提供了必要的条件.另外,真空系统也是地基引力波探测器体积最庞大、消耗资源最多的设备.但是真空系统仍会有少量气体残留在其中,这些残留气体会导致热噪声和密度折射率扰动,从而影响干涉仪相位测量,即产生真空残余气体噪声.探测过程中残余气体噪声需要降至远低于引力波信号.由此可见,降低残余气体噪声成为搭建地基引力波探测装置关键问题和技术之一.
众多地基引力波探测计划相继在理论和实验上研究了残余气体噪声对灵敏度的影响.实验通常使用气体注入控制系统来控制真空内气体浓度和压力.LIGO 原型机(40 m)采用真空系统中注入纯氙气、二氧化碳或氮气的方案,监测了在800 Hz 至2000 Hz 的频率范围内残余气体噪声对干涉仪灵敏度的影响.测量结果验证了频率、分子极化率、质量、压强等因素和位移噪声灵敏度关系的理论预测[28].TAMA300 采用注入氙气的方案,并利用超过百米臂长的干涉仪证明了残留气体对探测信号的噪声影响.实验发现 0.03 Pa 的氙气压强增大会导致镜面位移噪声增大3×10-18m/Hz1/2,这一结果与理论模拟的由于残余气体散射引起激光束的光学波动结果相符[7].这些实验表明,残留气体对探测信号的噪声影响是非常显著的,因此对残留气体的控制是非常重要.为了减少残余气体噪声,现有地基引力波探测器均采用多部分组合真空系统.在这些系统中,真空系统被分成多个区域,每个区域都有一套独立的真空获取系统,包括真空泵、真空计、质谱仪等.各个区域之间安装气体隔离阀门,以便控制气体流动.这样的设计不仅可以减少气体在不同区域之间的扩散,而且可以方便部分真空的重复获取以实现局部维护的目的.除了使用多级真空系统,地基引力波探测器还使用各种技术来控制气体残留.此外,对于大型探测器,通常使用冷却器来减少气体扩散,并且还可以使用吸附剂和分子筛等物质来吸附气体,以减少气体残留[32].总之,地基引力波探测器中的真空系统设计需要采用多种技术来控制气体残留和减少残余气体噪声.通过这些技术的应用,地基引力波探测器可以实现高灵敏度的引力波信号探测.
随着引力波探测技术的进步,探测器的灵敏度也在不断提高.探测灵敏度从第一代10-22Hz-1/2提高到第二代的10-23Hz-1/2,第三代未来计划将达到10-24Hz-1/2[18].因此,目前计划建设的第三代引力波探测器需要将真空系统中的残余气体噪声降低至10-24Hz-1/2量级以下[33].规划中的第三代引力波探测装置ET 和CE 的真空系统的真空度均计划达到10-8Pa[17].国外现有探测器也纷纷提出了升级计划.KAGRA,Advanced Virgo,Advanced LIGO 将采用超高真空技术,真空度预计可以达到10-8Pa 量级.这对引力波探测装置的大型真空系统提出了更高的要求和挑战.地基引力波探测装置的建设周期相对较长,国内尚处于起步阶段[34].与国际同类项目相比,我们方案计划的引力波探测大型干涉仪项目具有以下显著特色和优势.1)更长的臂长长度,欧洲Virgo、日本KAGRA 的臂长为3 km,LIGO 的臂长为4 km,而我们的方案设计达到10 km 的臂长.这将进一步提高引力波探测的灵敏度.2)地下废弃矿井的利用,国外大型引力波探测干涉仪仅有日本KAGRA 是建在地下.日本的KAGRA 是放置在山体内部,距地面平均深度不一致.而我们选择了地下废弃的矿井作为设施的选址,平均深度更大.引力波探测大型干涉仪设置在地下工作可以大幅度降低地表上的各种低频噪声.另外,山西省境内拥有长达十余千米的废弃深井.这些废弃矿井的充分利用不仅有助于降低建设成本,还可以促使能源产业向可持续发展的转型.3)超低温环境,我们的引力波探测大型干涉仪项目不仅设置在地下,而且将采取超低温措施,有望将引力波探测目标频段在10—103Hz 的基础上进一步降低.本文针对我国第三代地基引力波探测装置的建设,理论上分析了臂长20 m 原型机和臂长10 km 的全尺寸装置中残余气体噪声对引力波探测灵敏度的影响.首先,我们建立了残余气体粒子穿越激光光束的模型,分析了残余气体噪声与探测灵敏度关系的理论,并模拟计算给出真空残余气体噪声与真空系统气体压强、环境温度、残余气体质量、气体极化率、测试质量的曲率半径等参数的变化趋势.这为我们第三代引力波探测器真空系统的设计和搭建提供了重要的理论依据.
2 残余气体噪声理论
引力波探测器的核心设备是一台大型光学迈克耳孙干涉仪.引力波引起两条干涉臂长度的相对变化会引起激光干涉仪输出光强的变化,从而实现对引力波的探测[35].目前国内外地基引力波探测装置大多采用“L”形设计.为了简化对残余气体噪声影响的研究,理论上针对其中干涉臂所在真空管道中的光束开展研究.在高真空状态下,管道内仍然有气体残留,属于分子流状态.当气体压强降低,气体粒子的平均自由行程会变长.气体分子的平均自由程与流管的直径D之比称为克努森数,可用克努森数来判别气体的流动状态.当系统处于超高真空状态时(真空压强小于10-7Pa),气体的平均自由行程与管道直径可比拟(即克努森数>1/3).这样就可以忽略气体间的碰撞,此时气体粒子呈无规则运动状态[36],这也是干涉仪进行引力波探测时的工作状态.我们主要研究该状态下残余气体粒子对光束相位产生的影响.
图1 为迈克耳孙干涉仪及残余气体粒子与光束碰撞示意图.激光器发射出激光,经过分束镜分成两路,光束进入测试质量A1 和B1,由测试质量A2 和B2 反射.腔镜中来回反射的光束为高斯光束TE00模,残余气体粒子在光束横截面切向方向发生碰撞.气体粒子在真空管道中做无规则运动,设想一个气体粒子沿激光横截面x轴负方向以速度vT运动,图1 中用红色箭头指示.T=0 时,气体粒子在激光光束半径为b处的A点与光子发生碰撞,经过时间t,该气体粒子移动到半径为r处的位置B点.气体粒子与光束的碰撞改变了入射光横向的速度,从而引起了光束的相位移动为ψ,并影响光束出射的光场分布,从而引起激光光束的噪声,最终对引力波探测灵敏度产生影响.

图1 迈克耳孙干涉仪及残余气体粒子与光束碰撞示意图Fig.1.Michelson interferometer and collision between residual gas particles and light beam.
由图1可得r2=b2+vT2t2.t时刻的 光束相位ψ通过光 束振幅A(b) 和脉冲波形u(t,vT)来表示,即
其中光束振幅和脉冲波形分别为
(2)式中k为玻尔兹曼常数,α(ω) 为残余气体粒子频率为ω下的极化率,ω0为光束的腰斑半径.脉冲波形u(t,vT) 不受气体粒子起始位置的影响,取决于气体粒子的横向速度vT.下一步对t时刻的脉冲波形u(t,vT) 进行傅里叶变换,从频域的角度进行分析,即
在图1 激光光束中选取长度为 dz圆柱,根据麦克斯韦速度分布方程,得出在圆柱坐标中在宽db的圆环处偏移 dφ的一小块区域内,气体粒子与入射光碰撞产生的脉冲速率:
其中ρ为气体数密度,T为环境温度,vz为残余气体粒子沿z方向的速度.相位功率谱的积分为:
已知脉冲波形的振幅、频谱的平均值和脉冲速率,选取臂长为L的光束长度进行积分,得到相位功率谱的公式:
因为散射引起了光束模式的相位偏移,于是将光束半径和气体粒子运动的最可几速度公式代入,近似得到一条独立路径的干涉仪光束相位浮动引起的残余气体噪声为
对于(8)式,其中f为频率,α为气体极化率,ω(z)为光束半径,v0为残余气体粒子的最可几速度,ψ(f) 的量纲为残余气体噪声影响探测灵敏度的因素主要有两个方面:真空系统的环境因素(真空系统的压强和环境温度以及残余气体的质量和种类)和干涉仪的设计因素(测试质量的曲率半径).为了降低残余气体噪声对残余气体噪声的影响,我们对干涉仪各种因素和灵敏度的关系进行分析,并对第三代地基引力波探测器原型机和全尺寸装置真空系统的建造参数进行了预测.
3 噪声影响因素分析
我们计划建设地基引力波大型探测装置主要分为两个阶段.第1 阶段为原型机,第2 阶段为全尺寸装置,其真空系统示意图如图2 所示.该系统包括真空室、真空管道、真空获取设备、真空阀门等组件.真空室为干涉仪测试质量及其隔振系统提供真空工作环境,其中包括光路平台、分束镜片、测试质量腔镜等设备.分束器、测试质量A1(B1)与测试质量A2(B2)的真空室通过真空管道相连.表1 为引力波探测干涉仪原型机和全尺寸装置的主要参数.下文分别研究各参数对探测灵敏度的噪声影响.

表1 引力波探测干涉仪原型机和全尺寸装置的参数表Table 1.Parameters of prototype and full-size device of gravitational wave detection interferometer.

图2 计划建设的真空系统设计图Fig.2.Schematic of designed vacuum system.
3.1 真空系统的压强
真空压强是尤为重要的影响因素.在真空系统的气密性良好和真空泵正常运行的情况下,通过不同类型真空泵的组合使用可以控制真空系统的压强并最终达到其极限压强.根据(8)式得到原型机和全尺寸装置不同真空压强时残余气体噪声随探测频率的变化趋势,如图3 所示.在1×105,2×10-6,2×10-8Pa 三个压强条件下,频率1—103Hz 范围内残余气体对原型机和全尺寸装置引起的噪声分别约为10-17,4.7×10-23,4.7×10-25Hz-1/2和8×10-20,3.5×10-25,3.5×10-26Hz-1/2.原型机和全尺寸装置在104Hz 和103Hz 以上残余气体噪声的影响会快速减小.

图3 原型机和全尺寸装置在不同压强情况下,残余气体噪声与探测频率的关系图Fig.3.Relation of residual gas noise and detection frequency at different pressures.
由图3 可知,随着真空压强的减小,残余气体噪声相应会减少,因此,我们分析了探测频率为100 Hz 时原型机和全尺寸装置的残余气体噪声和压强的变化关系,如图4 所示.真空压强和残余气体噪声呈线性增大的关系,变化率为0.5 Hz-1/2/Pa.根据所设计的真空系统获取方案,将采用机械泵、涡轮分子泵、低温泵和离子泵组合的真空泵系统,预计可达到极限真空度为2×10-7Pa.此时残余气体粒子其对原型机的噪声可降至1.5×10-23Hz-1/2,对全尺寸装置的噪声可低至1.1×10-25Hz-1/2.这些噪声低于原型机和全尺寸装置1×10-19Hz-1/2和1×10-24Hz-1/2的设计灵敏度,符合干涉仪对真空度的参数要求.

图4 原型机和全尺寸装置中,残余气体噪声与真空系统压强的关系图Fig.4.Relation of residual gas noise and vacuum system pressure.
3.2 真空系统的温度
环境温度是影响探测灵敏度的重要因素之一.考虑在四季正常温度变化的范围内,研究了240,270,300 K 三个温度条件下残余气体引起的噪声.根据(8)式模拟了原型机和全尺寸装置在不同环境温度下残余气体噪声随频率的变化,如图5 所示.在频率在1—103Hz 范围内,原型机和全尺寸装置的噪声分别约为1.3×10-23,1.2×10-23,1.1×10-23Hz-1/2和4×10-25,3.6×10-25,3.4×10-25Hz-1/2.
由图6 可知,随着环境温度的升高,原型机和全尺寸装置的残余气体噪声相应会减少,在104Hz和103Hz 以上噪声会快速降低.图6 展示了探测频率为100 Hz 时原型机和全尺寸装置的残余气体噪声和环境温度的变化关系.残余气体噪声和环境温度呈线性减少的关系,变化率为-1.1×10-3Hz-1/2/K.在理想情况下,当环境温度升高时,残余气体噪声会增加.因为在高温条件下气体的分子运动更加剧烈,导致气体粒子对光束的相位影响增强,从而增加了系统的噪声.但是,在超高真空的条件下,环境温度升高,残余气体粒子运动剧烈,真空系统中的离子泵加快对残余气体粒子的电离,从而减少残余气体粒子的气体数密度,进而减小系统的噪声.这种情况在高真空实验室等应用中较为常见[37].考虑真空获取方案和温度控制成本,我们计划采用室温的精密控制系统.在室温下,残余气体粒子对原型机的噪声可降至2.2×10-23Hz-1/2,对全尺寸装置的噪声可低至3.4×10-25Hz-1/2.这些噪声低于原型机和全尺寸装置1×10-19Hz-1/2和1×10-24Hz-1/2的设计灵敏度,符合干涉仪对真空系统温度的参数要求.温度虽然相对于压强来说是次要的影响因素,但仍需要考虑.

图6 原型机和全尺寸装置中,残余气体噪声与真空系统环境温度的关系图Fig.6.Relation of residual gas noise and the temperature of vacuum system.
3.3 残余气体的气体质量和气体种类
不同种类的残余气体会对干涉仪噪声产生不同的影响,因此我们进一步考虑残余气体质量和种类与噪声的关系,以便调整和优化真空获取的技术手段.在真空系统中,气体质量分析仪被用来分析残余气体中不同种类气体的含量.根据(8)式模拟得到探测频率为100 Hz 时原型机和全尺寸装置的残余气体噪声和残余气体质量的变化关系,如图7所示.残余气体噪声随着残余气体质量的线性增大而呈比例增大,变化率为0.25 Hz-1/2/g.所设计的真空系统预计残余气体质量可以降到10-27g 的量级.当残余气体质量为10-27g 时,残余气体噪声可降至1.1×10-23Hz-1/2,而全尺寸装置的噪声可低至2.6×10-25Hz-1/2.这些噪声低于原型机和全尺寸装置设计灵敏度.
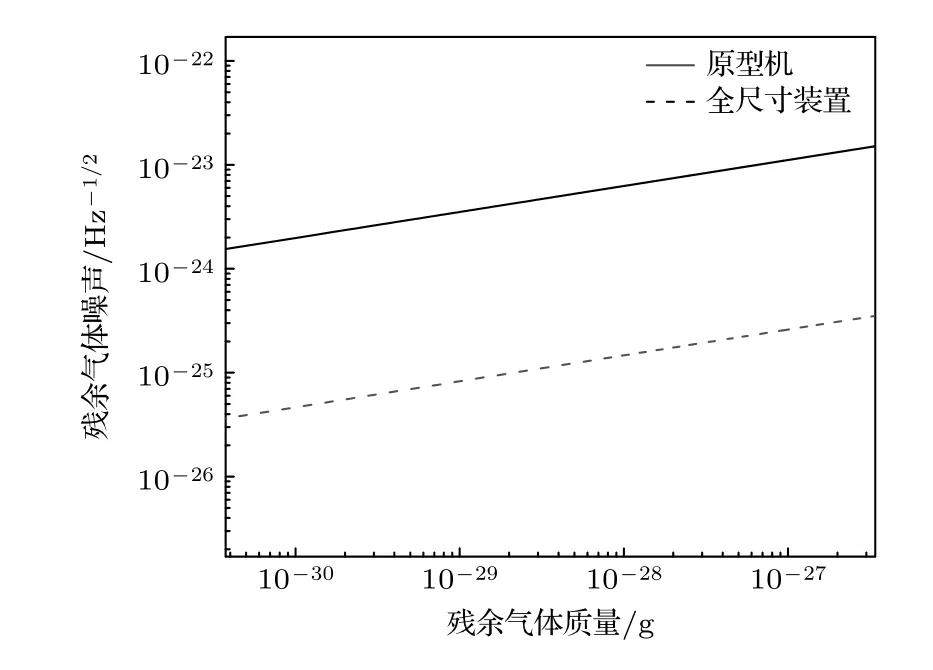
图7 原型机和全尺寸装置中,残余气体噪声与真空系统残余气体质量的关系图Fig.7.Relation of between residual gas noise and residual gas mass in vacuum system.
不同种类的气体粒子具有不同的气体极化率.在真空系统中,使用静电探头可以检测不同气体的极化状态,从而得到气体的极化率信息.根据(8)式可以模拟得到原型机和全尺寸装置在不同极化率残余气体噪声随探测频率的变化曲线,如图8所示.我们选取了H2,H2O,Xe 三类具有不同气体极化率的气体进行分析,其极化率分别为0.787×10-30,1.501×10-30,4.005×10-30C·m2/V[38].

图8 原型机和全尺寸装置在不同极化率下残留气体粒子噪声与探测频率的关系图Fig.8.Relation of residual gas noise and frequency with different polarizability.
图8 给出了3 种气体条件下原型机和全尺寸装置的残余气体噪声,分别约为1.4×10-23,2.7×10-23,7.2×10-23Hz-1/2和7.5×10-26,1.5×10-25,3.8×10-25Hz-1/2.由此可见,真空系统中当气体数密度相同时,气体的极化率越小,残余气体噪声越低,对探测灵敏度的影响越低.因此,真空获取过程应对于不同种类气体粒子进行有针对性的去除手段.例如,可以采用烘烤和低温泵去除空气中存在的水分子;使用离子泵利用高电压将H2和惰性气体离子化,然后加速到阴极上发生溅射,将其固定在管壁上,来去除真空管道中的H2和惰性气体.
3.4 干涉仪测试质量的曲率半径
当臂长20 m 的原型机和臂长为10 km 的全尺寸装置的臂长确定后,测试质量的曲率半径即成为影响干涉仪灵敏度的重要因素.图9 和图10 展示了原型机和全尺寸装置残余气体噪声随测试质量曲率半径的变化关系.原型机的残余气体噪声的变化范围在10-23Hz-1/2量级;全尺寸装置的残余气体噪声变化范围为10-25Hz-1/2的量级.当臂长和腔长一定时,随着测试质量曲率半径增大,残余气体噪声呈先增加后减少的变化趋势.这是因为在当曲率半径逐渐增大时,光束半径的增大导致模体积会增大,导致光和残余气体作用的体积增大,这使得残余气体噪声增加.而当曲率半径继续增大时,光束会逐渐扩散,光功率密度会降低,减小了光与气体分子相互作用的概率,进而残余气体噪声的影响相应减小.随着曲率半径的增大将会引起光束的扩散,这将会引起腔壁对光子反射噪声的增大,为了降低腔壁反射的杂散光引起的相位噪声,技术上通常采用两种方法[39]:1) 在真空管道内壁添加遮光罩,它是由倾斜一定角度的挡板组成,遮光罩可以减少反射光线的散射和干扰;2) 遮光罩和真空腔壁进行涂层处理,对光的反射和散射具有较高的吸收作用.由图9 和图10 可知,当曲率半径接近半腔长时,即接近共焦腔的临界条件,残余气体噪声最小.但是为了使腔实现单模模式稳定的输出,一般选择测试质量的曲率半径略大于腔长的一半.因此,为了兼顾稳定的光腔模式和较好的灵敏度,原型机和全尺寸装置的测试质量曲率半径设计为10.2 m 和5.1 km 作为数值参考.

图9 原型机中测试质量曲率半径和残余气体噪声的变化示意图Fig.9.Residual gas noise as a function of the radius of curvature of the test mass in the prototype.

图10 全尺寸装置中测试质量曲率半径和残余气体噪声的变化示意图Fig.10.Residual gas noise as a function of the radius of curvature of the test mass in a full-size device.
地基引力波探测装置的真空系统计划采用以下真空获取技术:采用机械泵、分子泵结合的泵组对真空系统进行粗抽;通过高温烘烤去除真空内部吸附气体粒子和水分子;采用低温泵去除真空内小质量气体分子;采用离子泵提高真空系统的真空度并维持超高真空的环境.采用S316 不锈钢作为真空系统主体结构的制作材料;通过抛光、清洗真空内壁或涂层处理以减小真空系统内部表面积来减小气体粒子吸附;在安装进入真空系统前真空烘烤预处理真空内部悬挂装置及光学器件;采用分段式连接设计,通过阀门控制真空室和真空管道的互通,并将真空系统隔离为若干部分,从而在真空内部安装、更换、维护悬挂装置及光学器件时不影响其他真空部分,各真空部分单独获取和控制,降低真空获取时间以减小对干涉仪整体工作的影响;通过自动化技术对真空系统进行控制与监测等.
4 结论
综上所述,臂长为20 m 的原型机和臂长为10 km 的大型地基引力波探测装置的设计灵敏度分别为10-19Hz-1/2和10-24Hz-1/2.针对设计灵敏度,本文研究了残余气体噪声对引力波探测装置灵敏度的影响因素,主要研究了包括真空系统压强、环境温度、残余气体质量、气体粒子极化率、干涉仪测试质量曲率半径等参数.模拟结果给出了残余气体噪声随各参数的变化关系.标准量子极限是目前限制干涉仪灵敏度的主要因素.计算结果表明选择合适的真空度可以将真空残余气体引起的噪声水平降至10-25Hz-1/2左右,接近目前所能达到的标准量子噪声.另外,目前突破干涉仪标准量子极限的技术是压缩态光场的采用.山西大学已经实现压缩度达到12.6 dB 的压缩态光场[40],并有望应用于未来的引力波探测器.标准量子极限的突破也会对真空系统提出更高的要求.目前,国内外地面引力波探测装置真空系统的最佳真空度水平通常约为10-6Pa 的数量级.LIGO[41]和Virgo[42]的真空系统参数设计优于10-5Pa.随后压缩光等技术的应用降低了量子噪声,这对真空度提出了更高要求.真空度达到10-7Pa 已经在多个引力波探测器应用或者提出升级计划,如Advanced LIGO[41],Advanced Virgo[42],KAGRA[43].因此未来第三代引力波探测装置将真空系统的设计压强设定为10-6Pa.所以我们的方案要在频率10—103Hz 范围内达到并突破设计灵敏度,残余气体压强需达到2×10-6Pa 以下.为了尽可能降低残余气体噪声的影响,需将真空系统维持在超高真空条件,对真空系统进行环境温度控制与监测,去除极化率较高的气体粒子并减少残余气体的质量,设计干涉仪时选择合适曲率半径的测试质量.本文不仅探究了残余气体影响引力波探测器灵敏度的原理和理论,并且分析各种残余气体噪声的影响因素,为引力波探测原型机和全尺寸装置的设计和建设提供了重要的理论依据.
感谢山西大学鞠明健的有益讨论.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
军民两用技术与产品(2021年9期)2021-11-27
计测技术(2020年6期)2020-06-09
西安航空学院学报(2020年1期)2020-06-01
现代装饰(2020年4期)2020-05-20
百科探秘·航空航天(2020年12期)2020-01-22
航天电子对抗(2019年4期)2019-06-02
制导与引信(2017年3期)2017-11-02
科学大众(中学)(2016年9期)2016-12-29
现代兵器(2016年4期)2016-04-27