
信号极化方式对跟踪接收机相位影响研究
2024-04-01 05:13:36林习良刘明波庄乾波徐文章
现代雷达 2024年1期
林习良,刘明波,庄乾波,徐文章
(中国卫星海上测控部, 江苏 江阴 214431)
0 引 言
通信卫星常采用极化复用的方式提高频谱利用率。为适应不同极化方式,地面卫通站天线馈源大多采用双圆/双线极化设计,馈源不同状态对应于不同极化方式,与信号传输相匹配。该状态差异影响在移动卫通站大范围机动时会显现出来,具体表现在部分状态下随卫通站地理位置变化跟踪接收机相位会发生漂移,引起天线跟踪性能下降,多个船载卫通站出海期间曾出现过类似问题。
文献[1-3]针对3种不同状态下船载卫通站机动中出现的天线跟踪性能下降问题,分别分析了某一特定极化方式下跟踪接收机相位漂移的原因,缺少对另外5种极化方式的分析;文献[4]研究了单脉冲跟踪接收机角误差信号解调基本原理,没有对信号的极化方式进行区分,缺少对相位变化规律的研究。相关文献均没有对跟踪接收机相位受极化方式的影响进行全面系统地分析研究,国外公开文献中也未见有同类问题研究成果的发表。
本文针对工程应用中遇到的问题,以典型的移动卫通站天线馈源结构为参考,结合圆极化器工作原理,对跟踪接收机使用的和、差信号进行了解析,根据所使用的单通道单脉冲跟踪接收机角误差信号解调原理,得到了8种不同状态下跟踪接收机相位与极化角间的全面关系,为跟踪接收机相位补偿设计提供了理论依据。
1 极化合成与转换
1.1 极化合成
根据电磁场理论,空间任意固定点处振幅为b、初始相位为α的右旋圆极化(RHCP)波可表示为ERH(t)=bej(ωt+α),左旋圆极化(LHCP)波可表示为ELH(t)=be-j(ωt-α)。按照极化合成原理:任何极化的平面电磁波,都可以用两个极化方向相互垂直的线极化波叠加构成,可表示为[5]
(1)
(2)
同样,线极化波(LP)可以分解为振幅相等旋向相反的两个圆极化波,则偏离x轴角度α的线极化波可表示为
EL(t)=2bcos(ωt)ejα=bej(ωt+α)+be-j(ωt-α)=
ERH(t)+ELH(t)
(3)
基于以上理论,通过专门的移相设计,即可实现线极化与圆极化信号的相互转换。
1.2 极化转换
假设天线接收的来波沿+z方向传播(从纸面向外,坐标关系可参见图1),接收信号进入馈源圆波导后经圆极化器从矩形波导口输出,在与传播方向垂直的平面xOy上,x轴与地面站当地水平面平行,y轴与地面站的垂直极化方向平行,uOv为xOy顺时针方向旋转45°,线极化方式时圆极化器移相面与x轴平行,圆极化方式时圆极化器移相面与u轴或v轴平行。本文以移相面与u轴平行为例进行分析,馈源水平极化端口等效截面示意图如图1所示。

图1 极化转换示意图Fig.1 Schematic diagram of polarization transform
当来波为式(1)表示的右旋圆极化信号时,在平面uOv上,可以分解为u、v两个空间正交的分量。
ERH(t)=bej(ωt+α)=

(4)


(5)
从而完成右旋圆极化向水平极化的转换。
同样可以推导出,式(2)表示的左旋圆极化信号经过圆极化器后从另外一个端口输出,空间上与y轴平行,完成向垂直极化的转换,可表示为
(6)
2 信号分析
2.1 馈源结构
采用双圆/双线极化设计的卫通站天线馈源网络主要由波纹喇叭、TE21模耦合器、圆极化器、分波器、旋转关节和矩形波导等部分组成,一种典型的移动卫通站天线馈源结构如图2所示。
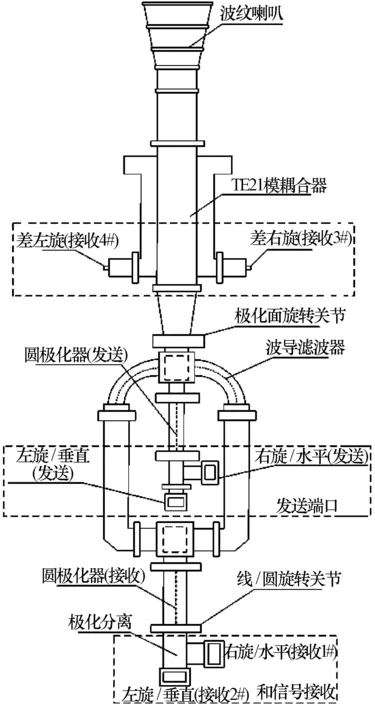
图2 馈源网络结构图Fig.2 Structure of the feed components
图2所示的三组端口,每组含两个互为正交的端口,其中一组用于发射上行信号,分别为水平极化和垂直极化,圆极化状态下经过圆极化器(采用销钉移相器)后分别对应为右旋圆极化和左旋圆极化;一组用于接收和信号输出,分别为水平极化和垂直极化,圆极化状态下对应于极化转换前的右旋圆极化和左旋圆极化;一组用于接收差信号输出,分别为右旋圆极化和左旋圆极化。实际使用中和、差信号接收端口均与低噪声放大器连接,根据图2所示馈源的工作原理,对于某一特定极化的信标,在每个接收端口是否有信号输出主要由馈源极化工作状态和信标极化方式决定。本文主要讨论与跟踪接收机解调相关的和、差信号接收端口的极化方式,图中将端口按1~4编号,工作于圆极化方式时,接收端口1与馈源的相对关系可以等效为图1。
工作于线极化方式时,图2中接收端口1与馈源的等效相对关系可简化如图3所示。

图3 水平极化馈源等效示意图Fig.3 Schematic diagram of feed in horizontal polarization state
天线对准卫星后,极化面未调整时接收端口1矩形波导窄边与x轴平行,宽边与y轴平行,不考虑三轴稳定、两轴跟踪体制天线[6]引入的极化偏差[7],地面站相对于卫星水平极化的极化角为[8]
(7)
式中:LE为地面站经度;Φ为地面站纬度;LS为同步卫星星下点经度。其中东经、北纬取正,西经、南纬取负。虽然圆极化方式下极化角并无实际意义,但对于跟踪同一颗卫星,文中主要以θ变化表示移动卫通站机动时地理位置的变化。
2.2 信标类型
通过对当前常用通信卫星的统计,信标极化方式可分为以下两种。
1)圆极化卫星:右旋圆极化、左旋圆极化和线极化。
2)线极化卫星:水平极化(HP)、垂直极化(VP)。
以3颗卫星C频段转发器为例,线极化的亚太7号卫星(76.5°E)水平极化信标频率为4 199.3 MHz、垂直极化信标频率为3 626.3 MHz;圆极化的新天12号卫星(57°E)左旋圆极化信标频率为3 950.0 MHz、右旋圆极化信标频率为3 948.0 MHz;圆极化的国际18号卫星(180°E)右旋圆极化信标频率为3 947.5 MHz和3 952.5 MHz,线极化信标频率为3 950.0 MHz,所需左旋圆极化信号从线极化信标的左旋分量中获取。
对于上述5种信标极化方式,右旋圆极化信标可用式(1)表示,左旋圆极化信标可用式(2)表示,式中α为任意常值;线极化信标可用式(3)表示,参照图3所示关系(图中以θ<0为例),当其与卫星水平极化方向成夹角δ时(δ为常量且-π/2≤δ≤π/2),取α=-θ+δ。作为线极化的特例,水平极化信标取δ=0即α=-θ[9],垂直极化信标取δ=π/2即α=-θ+π/2。
2.3 差信号
对于图2所示的馈源网络,波纹喇叭和TE21模耦合器状态不随天线极化方式变化而变化。对于右旋圆极化信标,差信号只在接收端口3输出;对于左旋圆极化信标,差信号只在接收端口4输出;对于式(3)表示的线极化、水平极化和垂直极化信标,差信号可同时从接收端口3和端口4输出。
TE21模耦合器输出的差信号用Δ表示、矩形波导接收端口输出的和信号用Σ表示,下标表示其对应的极化方式或经过转换后的极化方式。根据TE21模耦合器的工作特性,当天线波束中心偏离所需跟踪的卫星角度β时,右旋分量激励产生的差信号ΔRH、左旋分量激励产生的差信号ΔLH分别为[10]
ΔRH=b[μ1βcos(ωt+α)+jμ2βsin(ωt+α)]=
bμβcos(ωt+α-φ)
(8)
ΔLH=b[μ1βcos(ωt-α)-jμ2βsin(ωt-α)]=
bμβcos(ωt-α+φ)
(9)

设ξ3、ξ4分别为从TE21模耦合器输出经放大送至和差网络合成单通道时右旋差信号、左旋差信号传输产生的相移,则TE21模耦合器输出到达和差网络的差信号为
ΔRH=bμβcos(ωt+α+ξ3-φ)
(10)
ΔLH=bμβcos(ωt-α+ξ4+φ)
(11)
2.4 和信号
2.4.1 圆极化方式
1)右旋圆极化信标
根据前面的分析,右旋圆极化信号经过圆极化器后,从接收端口1输出式(5)表示的水平极化信号,考虑传输相移ξ1,到达和差网络的和信号可表示为
(12)
2)左旋圆极化信标
左旋圆极化信号经过圆极化器后,从接收端口2输出式(6)表示的垂直极化信号,考虑传输相移ξ2,到达和差网络的和信号可表示为
(13)
3)线极化信标
线极化信号可分解为左旋和右旋两个分量,和信号经过圆极化器后,在接收端口1和端口2同时输出,选择一路到达和差网络的和信号也可表示为式(12)或式(13)。
2.4.2 线极化方式
参照文献[9]分析,线极化方式下图1表示的圆极化器移相面与x轴平行,馈源极化面根据θ进行相应调整,水平极化信号经过圆极化器时移相π/2,垂直极化信号经过圆极化器时相位不变,均不产生极化转换作用,水平极化信号从接收端口1输出,垂直极化从接收端口2输出,选择一路到达和差网络的和信号为
ΣH=2bcos(ωt+ξ1)
(14)
ΣV=2bcos(ωt+ξ2)
(15)
3 接收机相位与极化角关系
根据地面站天线伺服跟踪系统采用的单通道单脉冲跟踪接收机工作原理,校相就是为了消除进入和差网络的差信号与和信号的初始相位差,以确保跟踪接收机解调出的和、差信号相位差能真实反映天线电轴偏离卫星的角度[4]。静态校相时,通过将式(10)或式(11)给定条件设为φ=0、π、π/2、-π/2等特定值,得到的跟踪接收机相位等于差信号与和信号的相位差。综合以上不同极化方式信号的表达式,和、差信号不同极化组合时的相位差计算结果见表1。

表1 校相结果比较Tab.1 Comparison of phase calibration
相位差不含θ项,说明该极化组合下跟踪接收机相位理论上是固定的,不需进行补偿;相位差含θ项,说明该极化组合下跟踪接收机相位会随地理位置的变化而变化,需采取相应的相位补偿才能消除其影响,通过比较可以得出以下结论:
1)只有圆极化方式下和、差信号极化一致时,跟踪接收机相位才不会随地理位置变化发生漂移,此时不需进行相位补偿;
2)圆极化方式下和、差信号极化不一致时,跟踪接收机相位将随地理位置变化而变化,相位变化量为极化角变化量θΔ的2倍,差信号为右旋、和信号为左旋圆极化时补偿值应为-2θΔ,差信号为左旋、和信号为右旋圆极化时补偿值应为2θΔ;
3)线极化方式下,跟踪接收机相位也随地理位置变化而变化,相位变化量等于极化角变化量θΔ,差信号为右旋圆极化时补偿值应为-θΔ,差信号为左旋圆极化时补偿值应为θΔ;
4)跟踪接收机的相位漂移是线性变化的,当其累积到一定程度超出系统交叉耦合指标后,才会表现出天线跟踪性能明显下降。
4 结果验证
长期以来,多个船载卫通站出海期间使用不同极化的卫星进行通信,跟踪接收机在国内某港口码头完成校相后,大范围机动时的使用情况归纳如下:
1)使用圆极化A转发器(对应于地面卫通站发送LHCP、接收RHCP)通信时,和、差均采用右旋圆极化信号,跟踪接收机未进行相位补偿,在波束覆盖范围内机动时天线跟踪稳定,说明其相位与极化角变化量θΔ无关。
2)使用圆极化B转发器(对应于地面卫通站发送RHCP、接收LHCP)通信时,和、差均采用左旋圆极化信号,跟踪接收机未进行相位补偿,在波束覆盖范围内机动时天线跟踪稳定,说明其相位与极化角变化量θΔ无关。
3)某次使用60°E卫星圆极化B转发器通信时,和信号采用左旋圆极化,差信号采用右旋圆极化,跟踪接收机未进行相位补偿,机动中天线跟踪性能下降直至无法跟踪,在东经102.7°、北纬1.4°附近对跟踪接收机重新校相后恢复正常,经与码头状态比较,相位比原校相值-70°,而极化角变化量θΔ为+33.6°,相位变化量基本符合-2θΔ的关系。
4)某新型跟踪接收机设计时针对跟踪线极化卫星进行了相位补偿,首次使用134°E卫星线极化A转发器(对应于地面卫通站发送VP、接收HP)通信时接入的差信号采用右旋圆极化,移动卫通站机动中出现天线跟踪性能下降直至失锁现象,通过人工逐步调整的方式,在原相位值基础上调整-2θΔ后天线跟踪性能恢复正常,分析跟踪接收机软件,发现程序中默认按差信号为左旋圆极化进行相位补偿θΔ,而实际使用的右旋圆极化差信号应进行相位补偿-θΔ[2,9],人工调整后-2θΔ跟踪正常,说明不同极化的差信号所对应的补偿值大小相等、符号相反。设计人员根据分析结果增加了差信号极化方式选择功能,将相位补偿策略调整为差信号采用左旋圆极化时相位补偿θΔ,右旋圆极化时相位补偿-θΔ,机动中使用134°E卫星线极化A转发器通信时,和信号采用水平极化,差信号采用右旋圆极化,同时将差信号极化方式也设置为右旋圆极化,随位置变化极化角由20.8°变为43.4°,天线跟踪稳定,此时人为将差信号极化方式设置改为左旋圆极化,天线无法捕获卫星,恢复为原设置后天线跟踪正常。
5)某船载卫通站由使用134°E卫星线极化A转发器切换为76.5°E卫星线极化B转发器(对应于地面卫通站发送HP、接收VP)通信时,不改变和、差信号连接端口,仅通过软件将天线极化面改为按θ′=(θ±π/2)来控制,和信号采用接收端口1输出的垂直极化,差信号保持采用右旋圆极化,机动中天线跟踪稳定,说明线极化方式下相位补偿由差信号极化方式决定,与和信号极化方式无关。
上述不同极化方式下的应用情况,与表1中的分析结果一致,其中三种极化方式与文献[1-3]得出的结论相符,从而能够验证分析过程与结论的正确性。
5 结束语
本文全面分析了和、差信号不同极化组合时跟踪接收机相位与极化角的关系,从原理上解释了移动卫通站使用中遇到的问题,为采取相应的相位补偿策略提供了依据。为保证天线稳定跟踪,圆极化时跟踪接收机使用的和、差信号极化方式应相同,不需进行相位补偿;线极化时跟踪接收机使用的差信号极化方式应保持不变,根据极化角变化采取一种固定的相位补偿策略即可,这样有利于简化跟踪接收机控制程序,而对于经常进行线/圆极化及A/B极化(与卫星转发器极化方式相对应)切换的移动卫通站,则需增加和、差信号极化方式设置功能,以避免频繁切换信号端口。
需要说明的是,由于参考坐标系不同,部分设备计算得到的极化角与本文所用公式计算结果符号相反,进行相位补偿时需根据其物理含义确定其极性。对于圆极化器安装角度与图1所示不同,移相面与v轴平行的设备,圆极化信号与矩形波导端口的对应关系将发生变化,限于篇幅未展开论述,其结果与本文给出的结论一致。
猜你喜欢
四川大学学报(自然科学版)(2020年6期)2020-12-04 01:54:22
空间电子技术(2020年2期)2020-06-04 00:41:38
河北省科学院学报(2020年1期)2020-05-25 06:57:20
西安科技大学学报(社会科学版)(2019年3期)2019-09-10 03:57:18
成都信息工程大学学报(2018年1期)2018-05-31 08:40:27
电子测试(2018年1期)2018-04-18 11:51:59
课程教育研究(2018年1期)2018-03-31 09:28:22
天文研究与技术(2016年4期)2016-10-27 01:50:09
西部广播电视(2015年6期)2016-01-16 03:45:12
药学与临床研究(2015年4期)2015-06-05 11:35:53
