
基于RBF神经网络的储能VSG控制策略优化
2024-03-28 02:11:12管敏渊吴圳宾满敬彬吴伟强
浙江电力 2024年3期
管敏渊,姚 瑛,2,吴圳宾,满敬彬,吴伟强
(1. 国网浙江省电力有限公司湖州供电公司,浙江 湖州 313000;2. 浙江泰仑电力集团有限责任公司,浙江 湖州 313000;3. 上海电力大学 电气工程学院,上海 200090;4. 国网浙江长兴县供电有限公司,浙江 湖州 313100)
0 引言
随着传统化石能源的日益紧缺,清洁、低碳、高效已经成为世界能源的发展趋势[1-3]。大规模高熵值的新能源接入,使得电网面临巨大挑战。储能系统能有效改善新能源发电系统的电能质量[4-6],是解决新能源电能输送和消纳等问题的关键。储能并网逆变器是储能系统与电网连接的核心器件[7],因此寻求优良的储能逆变器控制策略是发展新能源并网亟须解决的问题。
储能并网逆变器主要有电流型和电压型两种控制模式[8]。电流型控制模式通过控制并网电流实现对逆变器输出功率的调节,缺乏与电网之间的有效同步机制[9],难以对系统电压和频率进行调整。电压型控制模式从采用功率环与电压-电流双环相结合来控制逆变器输出电压的相位和幅值,从而实现对系统频率和逆变器输出功率的调节。电压型逆变器模拟同步发电机的运行特性,能够建立与电网之间有效的同步机制,实现电网频率和电压的调节,因此在储能并网研究领域备受关注。
常见的电压型控制模式有下垂控制[10-12]和VSG(虚拟同步发电机)控制[13-17]两种。下垂控制通过模拟同步发电机的下垂特性实现逆变器输出功率的控制,不具备惯量特性,在受到扰动时系统的频率容易不稳定。VSG 引入了惯量环节,更好地模拟发电机的运行特性,从而改善电力系统频率和电压稳定性,因此备受国内外学者关注。文献[9]借鉴传统同步发电机的小信号分析法,建立VSG的小信号模型,但是恒定的转动惯量使得系统在受到大干扰时在新平衡点附近发生振荡。针对惯量参数恒定带来的问题,文献[18-22]采用自适应惯量来改善VSG的性能,使得VSG在新平衡点附近的超调量大大减小。文献[23-25]提出了采用转动惯量和阻尼系数协同自适应的VSG控制策略,但是由于其本质是参数自适应,如果参数设置不合理可能导致系统不稳定。文献[26]采用辅助惯量功率来改进VSG的性能,基于辅助功率调节的VSG能够有效地解决功率振荡问题,但是其仅考虑惯量功率,所以在受到较大干扰时频率和功率抖动比较大。
RBF(径向基函数)神经网络对任意函数具有强大的学习能力,并且控制算法简单,学习速度快,能够满足实时控制的要求[27-28]。系统动态响应和频率稳定与VSG虚拟转子的不平衡功率密切相关,虚拟转子的功率缺额直接影响VSG 的性能。但是,鲜有文献尝试利用RBF 神经网络来在线调节VSG的暂态不平衡功率。
综上,本文通过分析扰动下储能VSG 的暂态过程,在传统储能VSG的基础上,提出一种基于RBF 神经网络ASDC(动态同步控制器)的储能VSG 控制策略。首先,通过系统角速度和角加速度变化得出VSG转子的动能变化,将动能变化表征为惯量功率和阻尼功率之和;其次,将惯量功率和阻尼功率作为RBF 神经网络算法的输入,通过RBF 神经网络算法在线学习得出最优暂态补偿功率来动态调节VSG的输入功率,从而减少转子的不平衡转矩,提高VSG 的暂态稳定性;最后,通过MATLAB 仿真和硬件在环实验对比验证了本文所提控制策略的有效性。
1 储能VSG的基本原理
储能VSG 由储能元件和并网逆变器等组成。储能元件主要用于电能的储存和释放,并网逆变器是连接储能元件与电网的接口。储能VSG通过模拟同步发电机运行特性来控制逆变器[9]。由转子运动方程和定子电气方程得到VSG输出的电压幅值和相位,再通过电压-电流控制环后生成PWM(脉冲宽度调制)波控制逆变器,从而得到满足电能质量要求的交流电。具体储能VSG工作原理如图1所示。

图1 储能VSG工作原理Fig.1 Operating principle of energy storage VSG
图1中udc为储能直流电压,Lf1和Cf分别为滤波电感和滤波电容。滤波电感电流iabc和滤波电容电压uabc为VSG 的输出电流和输出电压。经Park变换后的输出电流和输出电压,根据瞬时功率理论计算得Pout、Qout作为VSG 功率控制环的反馈功率。由同步发电机的二阶模型可得VSG的转子运动方程为:
式中:ω0和ω分别为额定参考角频率和系统实际角频率;Pout和PT分别为逆变器输出功率和VSG的输入功率;J和D分别为虚拟转动惯量和阻尼系数,二者均为非负数。
为模拟同步机的调速过程,在VSG 转子运动方程中加入调速环节:
式中:P*为功率参考指令;m为频率调整率。参照标准规定可知,电网装机容量在300 MW 以下可允许频率偏差为±0.5 Hz[26]。考虑频率偏差最大的情况对m进行参数配置[27]。
根据同步发电机定子电气方程可以将VSG 的电压控制方程表示为:
式中:Ls和r分别为同步发电机的同步阻抗和定子绕组等效电阻;E0为同步发电机的励磁电势。
进一步由同步发电机的励磁调节方式可得无功-电压的下垂特性为:
式中:u0和Q*分别为电压参考和无功参考;Ku和Ru分别为调压系数和电压调整率;u为逆变器出口电压。
VSG频率和电压控制原理如图2所示。
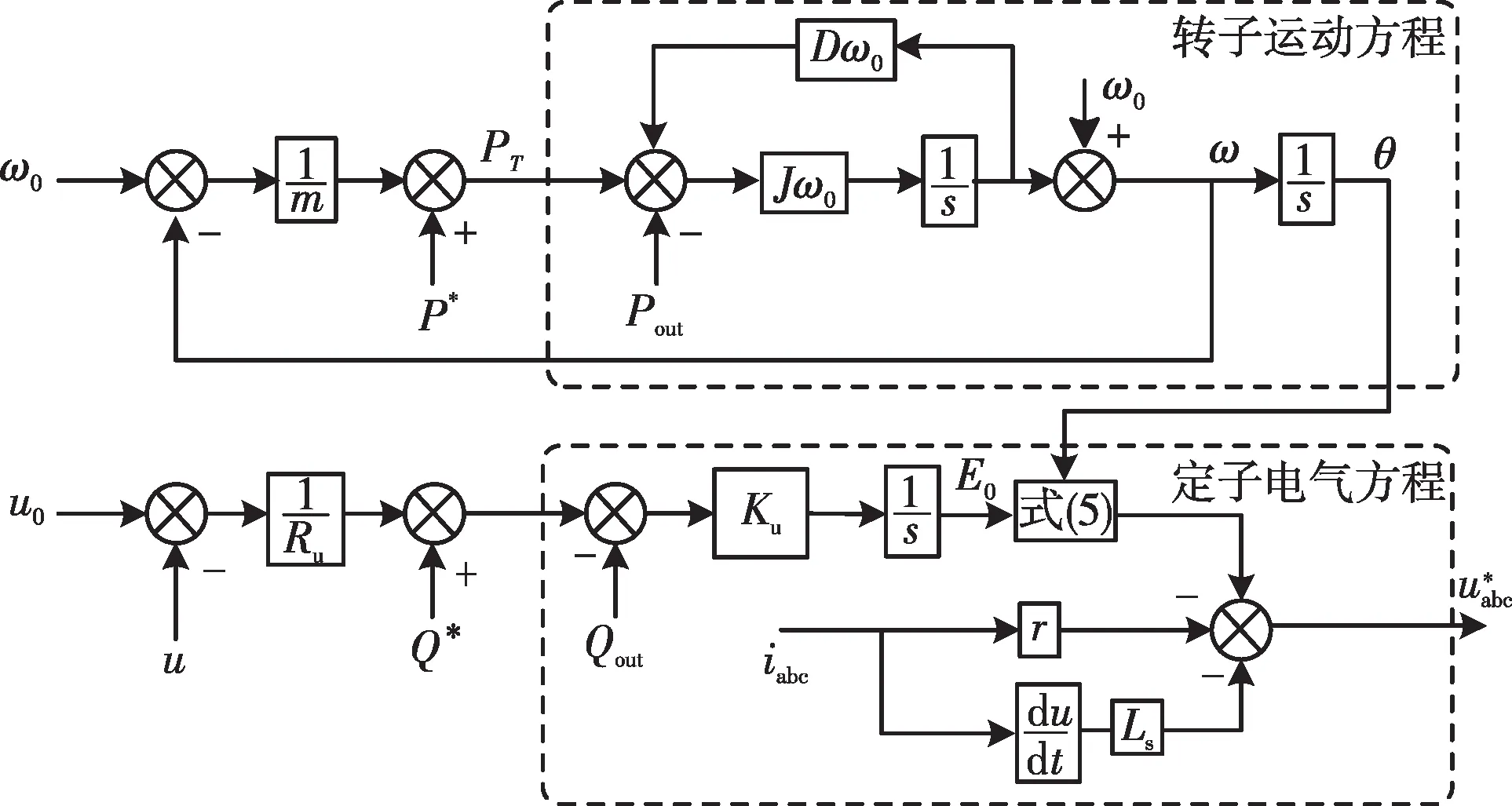
图2 VSG频率和电压控制原理Fig.2 VSG frequency and voltage control principle
2 控制参数对VSG性能影响分析
储能VSG 并网运行系统等效电路如图3所示。
假设系统处于稳态,忽略系统中各电气元件的电磁暂态过程,则有:
将Pout(δ)表示为在δ0处展开的泰勒级数形式,因为系统稳定时δ很小,故省略二次项及以上各项可得:
式中:整步功率系数SE=Pout(δ0)。
由标准二阶系统模型可得系统的传递函数为:
由控制原理可得,自然振荡频率和阻尼比为:
联立式(9)—(10)可得系统的单位阶跃响应为:
令β=arccosζ,则可以将式(11)等价为:
由式(12)可以看出,当D恒定时,J越小,振荡衰减角频率ωd越大,系统平稳性越差,不利于功率稳定;当J恒定时,D变大,ωd越大,单位振荡周期的衰减幅度减小,功率响应速度变慢。由控制理论原理可得,相角裕度和截止频率为:
为了保证VSG 的性能,ε应大于60°,即ζ>0.6,根据“最佳二阶系统”理论可以取ζ=0.707;参考文献[29],为更好地抑制功率振荡,可取截止角频率为额定角频率的0.2倍。
综上可知,参数设置在兼顾VSG 的系统稳定性和动态响应方面存在矛盾。为了避免参数调节带来的矛盾,本文在传统VSG的基础上,提出了基于RBF神经网络ASDC控制器的储能VSG控制策略。
3 基于RBF神经网络的ASDC控制器设计
3.1 ASDC控制器的原理分析
当传统发电系统受到干扰时,原动机的机械功率保持不变,就会引起同步发电机输入功率和输出功率之间存在功率缺额。该部分缺额功率在转子上产生不平衡转矩,使得系统频率发生振荡。最后由阻尼将该部分缺额功率消耗,系统角频率稳定于ω0。如果能通过快速调节发电机的输入功率来减小发电机输入功率和输出功率之间的功率缺额,那么将大大提高同步发电机的性能。
如图4所示,传统发电机组调速系统中的同步器主要由伺服电机、蜗轮、蜗杆等机械结构组成。由于机械构件具有惯性作用,因而传统调速系统调节作用具有一定的延时性,使得传统同步器调节对发电机暂态稳定的第一个摇摆周期作用不大。然而,电力电子逆变器的响应时间为毫秒级别,如果能借鉴传统同步器的工作特性,在VSG控制前级附加ASDC控制将能大大提高VSG的暂态稳定性。

图4 采用离心式液压调速系统的发电机组Fig.4 Generator set with centrifugal hydraulic speed regulation system
基于上述分析,采用附加ASDC 的VSG功角特性如图5 所示,其中和表示有功功率参考指令,Pm1表示VSG输入的有功功率。

图5 基于ASDC控制的VSG功角特性曲线Fig.5 VSG power angle characteristic curve based on ASDC control
ASDC 控制器功率调节是根据能量守恒定律来实现的。用VSG输出角速度和角加速度的变化关系来调节VSG输入的有功功率,从而实现系统功率和频率的稳定。ASDC 控制器模拟了传统原动机同步控制器的调节特性。如图5所示,当系统给定有功功率由突变为时,区间①:,系统处于加速阶段,随着Pout逐渐靠近,VSG 的角加速度也在逐渐减小并在b点角加速度减小为零,此时VSG 输出的角速度ω>ω0。区间②:系统运行于b点时∆ω最大,且∆ω(dω/dt)<0时,VSG处于减速区域,即,若此时用惯量功率和阻尼功率反馈调节VSG输入有功功率,就可以减小由于转子动能变化引起的输入功率和输出功率间的功率缺额。同时也可增大VSG 的角加速度(负值),使得系统的角速度可以快速恢复到ω0,但是由于转动惯量的存在,过大的角加速度容易使ω=ω0瞬间继续减小,从而产生振荡。为了解决这个问题,此时在b点突减VSG 输入有功功率后缓慢增大,使阻尼功率跟上VSG的输入功率变化,让系统平稳地由运行点a过渡到运行点b。在区间①和区间②的过程中,最主要的是ASDC 功率控制调节器根据∆ω和dω/dt来判断系统是否处于加速状态,再通过惯量功率和阻尼功率来自适应调节VSG输入有功功率的大小。储能VSG 是将储能等效为传统发电系统中的原动机,储能响应速度比原动机中的进汽阀门响应速度快得多,因此可以很好地抑制系统在响应功率变化时产生的振荡,并且可以减小有功响应的超调量。
3.2 普通型ASDC控制器的设计
根据能量守恒定理和式(1),取电磁功率增大为正,参考文献[30]可将惯量功率和阻尼功率定义为:
由式(14)可知:当转子加速时,转子吸收能量,动能增量为正,转子动能增大;当转子减速时,转子释放能量,动能增量为负,转子动能减小。当VSG角速度大于参考角速度时,阻尼调节功率为正;当VSG角速度小于参考角速度时,阻尼调节功率为负。可以认为阻尼调节功率与VSG输出角速度和参考角速度的偏差值有关,并且始终与较大值的角速度方向相反。因此可通过调节阻尼功率和惯量功率的大小来抑制系统频率和功率的超调量,具体的附加ASDC控制器的VSG控制框图如图6所示。

图6 附加ASDC的VSG控制框图Fig.6 Block diagram of VSG control of additional ASDC
通过上述分析,可得VSG 的输入有功功率由参考指令功率和ASDC调节功率组成,表示为:
可以将ASDC调节器设计为:
式中:kJ和kD为调节系数;η和γ为控制器的触发阈值。由角加速度和角速度偏差的乘积来判断系统运行区域,再通过调节ΔPJ来自适应调节VSG的输入功率。ΔPD是根据VSG 输出角速度与参考角速度的差值来自适应调节VSG的输入功率。当角加速度大于阈值η且Δω|dω/dt|>0 时,ΔPJ启动调节功能;当角加速度小于阈值η时,ΔPJ关闭调节功能。当角速度与参考角速度的差值大于阈值γ时,ΔPD开启调节功能;当角速度与参考角速度的差值小于阈值γ时,ΔPD关闭调节功能。即在系统受到干扰时,通过ΔPJ和ΔPD对VSG 的功率缺额进行暂态补偿,当系统恢复稳定时,暂态补偿功率为零。
3.3 基于RBF神经网络的ASDC控制
RBF神经网络对非线性函数的逼近效果良好,并且具有强大的学习能力和学习速度,可以通过对系统角速度状态的学习来实现VSG输入的暂态功率在线调整。因此,为了进一步提高控制精度,将3.2节得到的ΔPJ和ΔPD作为输入、VSG的暂态补偿功率Pcom作为输出构建如图7所示的RBF神经网络控制模型。
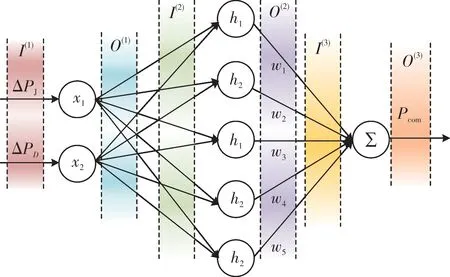
图7 RBF神经网络结构Fig.7 RBF neural network structure
本文采用2-5-1 结构的RBF 神经网络算法,该结构的RBF 神经网络共三层:输入层、隐含层和输出层。为了方便表示,上标(1)、(2)和(3)分别表示输入层、隐含层和输出层;I表示输入,O表示输出。具体控制算法如下。
输入层:
隐含层:
取隐含层节点的中心向量为ci,高斯基函数宽度为bi,则可以将隐含层节点激活函数表示为:
输出层:
式中:wi表示隐含层输出的权值。
本文将网络误差指标取为:
网络采用梯度下降法对权值wi进行调节,由于采样时长很短,可认为:
因此可得:
式中:κ为网络学习率。
取动量因子为α,则可以将输出权值的调节公式表示为:
因为高斯基函数宽度bi和中心向量ci的设计值须在有效的网络输入映射范围内,所以本文采用梯度下降法对bi和ci进行调节。bi和ci调节方式与wi调节方式相同,故不再赘述。附加基于RBF 神经网络ASDC控制系统如图8所示。

图8 基于RBF神经网络ASDC控制系统Fig.8 The ASDC control system based on the RBF neural network
综上所述,本文所设计控制器算法实现流程如图9所示。具体步骤如下:

图9 基于RBF神经网络ASDC控制算法实现流程Fig.9 Implementation flow of ASDC control algorithm based on RBF neural network
1)配置隐含层基函数ci和bi数值,选定网络学习率和取动量因子,初始化系统的输入和输出。
2)计算神经网络的输入与输出,RBF 神经网络的输出Pcom。
3)根据转子运动方程得到VSG 转子的转速度。
4)RBF 神经网络根据系统的运行状态进行学习,对隐含层到输出层之间的权值进行迭代更新。
5)程序再次执行步骤2,进行下一轮仿真迭代。
综上,传统参数协同自适应VSG、普通型ASDC改进VSG和基于RBF神经网络ASDC改进VSG 对虚拟转动惯量和阻尼系数的依赖程度如表1所示。

表1 各种VSG对虚拟控制参数的依赖程度对比Table1 Comparison of the dependence of various VSGs on virtual control parameters
4 仿真验证
在MATLAB/Simulink 仿真实验平台搭建微电网并网系统仿真模型,仿真模型拓扑结构如图10所示。分别采用传统VSG控制、参数协同自适应VSG控制和本文所提的控制策略在不同工况下运行,形成对比实验。模型主要参数如表2 所示。其中参数自适应VSG控制策略参考文献[24],附加ASDC的改进VSG参数设计参考文献[26]。

表2 仿真模型主要参数Table 2 Main parameters of simulation model
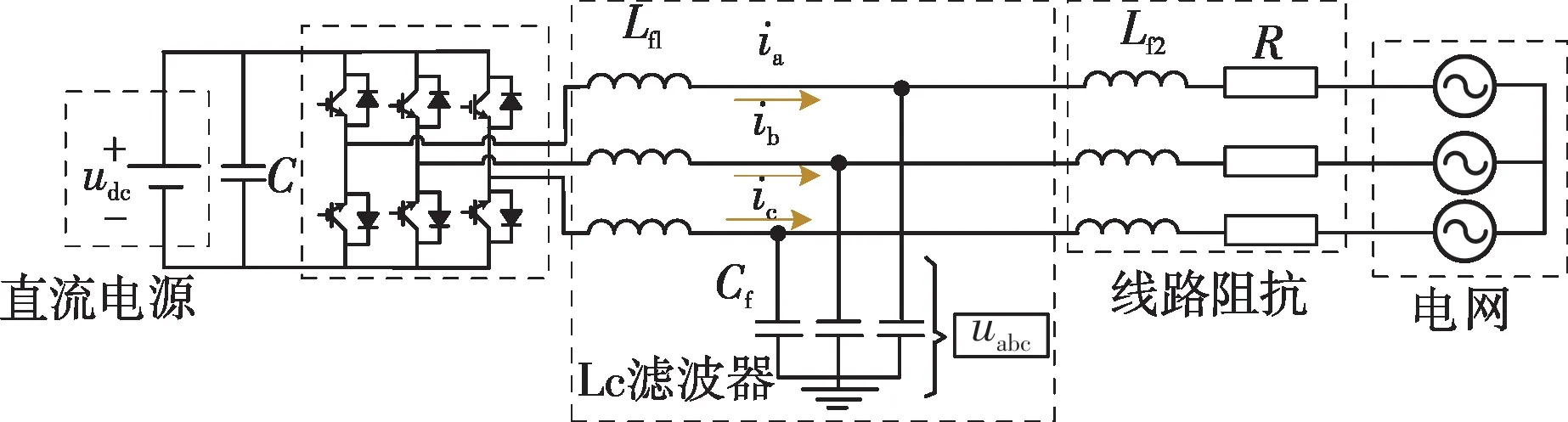
图10 仿真模型拓扑结构Fig.10 Simulation model topology
其中,J0和D0分别为传统VSG 和附加ASDC控制VSG的转动惯量和阻尼系数,同时作为参数自适应VSG转动惯量和阻尼系数的初始值。
工况1:在1 s时将有功参考功率由4 kW阶跃为8 kW,持续运行1 s 之后参考功率由8 kW 阶跃为4 kW。仿真结果如图11所示。
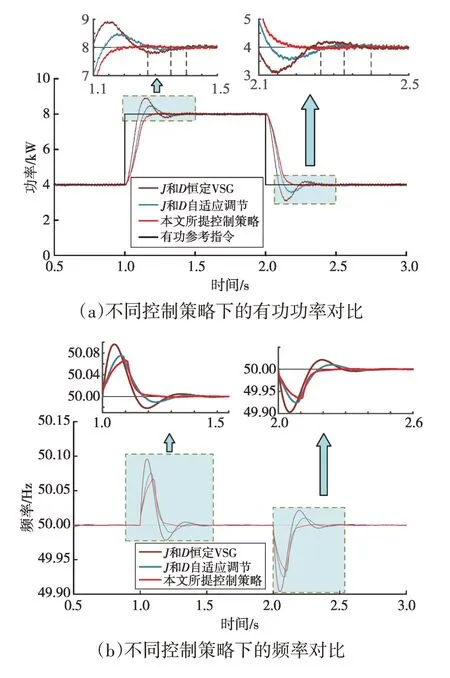
图11 参考功率阶跃变化工况的仿真波形Fig.11 Simulation waveforms of reference power step change condition
定义有功调节的超调量为:σ%=(PMAX-P*)/P*;定义调节时长为功率指令发生阶跃变化时刻到VSG 输出功率稳定在±0.5%误差带的时长。由图11可得,在有功参考指令增加4 kW时,传统VSG功率调节超调量为11.13%,频率恢复到50 Hz的时长为0.44 s,并且最大频率偏差量为0.09 Hz。参数自适应VSG功率调节超调量为6.01%,频率恢复时长为0.31 s,并且最大频率偏差量为0.078 Hz。本文所提控制策略在功率调节时几乎不会出现超调量,系统频率恢复到50 Hz 的时长为0.26 s,并且最大频率偏差量仅为0.065 Hz。在误差允许的范围内,有功参考指令减小4 kW的过程与有功参考指令增加4 kW 的响应过程相同,在此不再赘述。在频率响应中,前两个控制策略均出现了频率来回振荡,而本文所提控制算法能平稳快速地恢复到50 Hz。
工况2:三相接地故障。有功参考为4 kW,1.5 s 投入故障,1.6 s 切除故障,仿真结果如图12所示。
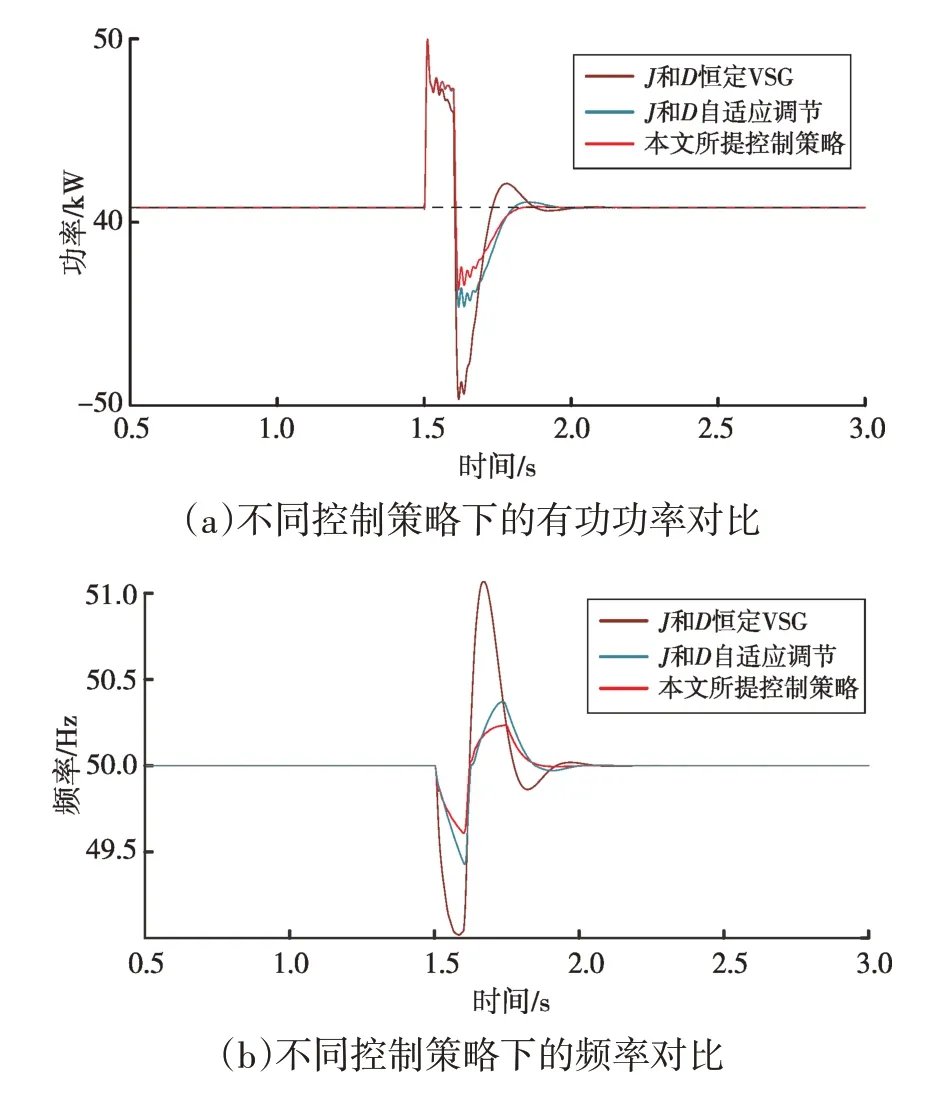
图12 逆变器出口侧三相接地故障仿真波形Fig.12 Simulated waveforms of three-phase ground fault at outlet side of inverter
从图12可以看出:在故障发生时,VSG的输出功率冲击能达到50 kW,故障切除后由于传统VSG 的虚拟转子无法响应大干扰功率变化导致转子吸收动能,因此传统VSG在故障切除后,转子释放动能,功率大幅下跌。参数自适应VSG通过角速度和角加速度来调整转子的动能变化,因此功率下跌幅度仅有传统VSG的一半。本文提出的ASDC 控制直接调整VSG 的输入功率,响应更快,功率下跌幅度最小。
5 结语
本文针对新能源微电网系统由于惯量缺失引起的稳定性问题进行研究,在传统的储能VSG上,提出了一种基于RBF 神经网络动态同步器的储能VSG控制策略,根据系统的角速度状态得出惯性功率和阻尼功率,将惯性功率和阻尼功率作为RBF神经网络的输入,利用RBF神经网络在线学习得出VSG最优暂态补偿功率,通过ASDC控制器在线调节VSG的暂态不平衡功率,减小虚拟转子的不平衡转矩,从而提高VSG的动态响应能力。此外,采用附加基于RBF 神经网络ASDC 控制的储能VSG更具独立性,能有效避免虚拟参数调节带来的动态响应与动态稳定之间的矛盾。仿真实验结果表明,本文所提控制策略在不同程度的扰动下都具备更好的动态响应速度和动态稳定性。
猜你喜欢
现代电力(2022年2期)2022-05-23 12:46:16
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
数学物理学报(2016年6期)2016-04-16 04:41:06
火控雷达技术(2016年1期)2016-02-06 02:18:01
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
