主动悬架自适应容错滑模控制研究
2024-03-24 10:43:32赵培通
汽车与驾驶维修(维修版) 2024年2期

摘要:为提高主动悬架系统的控制可靠性,针对主动悬架作动器故障对悬架系統稳定性的影响,本文提出了一种自适应容错滑模控制算法。首先,搭建了1/4 主动悬架模型与理想天棚参考模型;然后在分析主动悬架系统作动器故障类型后,构建了作动器恒增益故障模型;并在滑模控制算法的基础上结合自适应控制理论设计了自适应容错滑模控制算法;最后在Simulink 中搭建系统仿真模型,选取传统滑模控制器作为对照进行了仿真验证。由仿真结果可知,在作动器发生故障时,相比传统滑模控制算法,本文所设计的控制器提高了悬架系统的鲁棒性能和车辆的乘坐舒适性,从而确保了汽车的行驶安全性。
关键词:主动悬架;自适应容错滑模控制;作动器故障;恒增益故障模型
中图分类号: U461.6 文献标识码:A
0 引言
车辆主动悬架一般由传感器、作动器、控制器及动力源组成[1]。由于车辆主动悬架可通过作动器产生的作动力降低路面输入激励对平顺性和操稳性的影响,因而受到广泛关注[2]。目前在主动悬架各元器件状态完好前提下的控制算法研究已相对成熟,但在车辆实际使用过程中,某些元器件由于长期使用或运行环境恶劣难免会出现故障[3]。作动器作为主动悬架的最核心部件,其是否存在故障会直接影响主动悬架系统的主要控制性能,因而研究主动悬架系统的作动器容错控制具有重要的理论价值和应用前景。
目前,主动悬架容错控制主要分为主动容错控制和被动容错控制[4]。杨柳青等以实现主动悬架容错控制为目标,设计了一种基于H 2/H ∞的最优控制器,解决了作动器故障等问题[5]。王荣蓉等考虑作动器故障,针对整车主动悬架设计一种考虑有限频率约束的H ∞鲁棒容错控制器,提高了车辆的乘坐舒适性和操纵性[6]。文献[7] 将执行器故障建模为由齐次马尔可夫链控制的随机变量,设计了一种H ∞容错控制器。高振刚等针对作动器故障,提出了一种基于故障补偿思想的主动悬架容错控制算法,提高了车辆的控制可靠性[8]。寇发荣等以实现电磁混合悬架作动器主动容错控制功能为目的,采用未知输入观测器获取状态观测值对悬架进行故障诊断,同时采用LQG 控制器对悬架系统进行力补偿,提高了主动悬架系统的鲁棒性[9]。孙晋伟等设计了主动悬架二阶滑模控制算法,较传统H ∞算法更有效地提升了悬架系统的可靠性[10]。
在主动悬架作动器故障发生时,为了保障行驶过程中悬架系统的控制可靠性,本文提出了一种自适应容错滑模控制器,使其对故障不敏感。首先建立了1/4 主动悬架系统模型与理想天棚参考模型,针对作动器失效后所产生的增益故障,搭建了作动器恒增益故障模型,在滑模控制算法的基础上,本文结合自适应控制理论设计了自适应容错滑模控制器,并通过仿真试验验证了所设计控制器的有效性。
1 悬架动力学模型
1.1 1/4 主动悬架建模
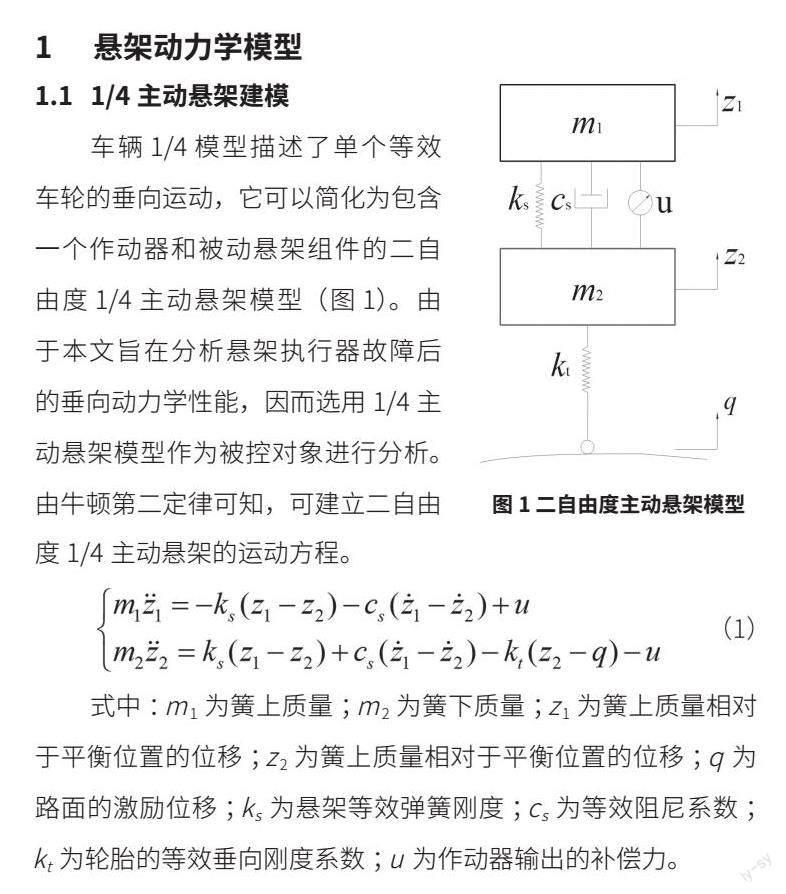
车辆1/4 模型描述了单个等效车轮的垂向运动,它可以简化为包含一个作动器和被动悬架组件的二自由度1/4 主动悬架模型(图1)。由于本文旨在分析悬架执行器故障后的垂向动力学性能,因而选用1/4 主动悬架模型作为被控对象进行分析。由牛顿第二定律可知,可建立二自由度1/4 主动悬架的运动方程。
式中:m 1 为簧上质量;m 2 为簧下质量;z 1 为簧上质量相对于平衡位置的位移;z 2 为簧上质量相对于平衡位置的位移;q 为路面的激励位移;ks 为悬架等效弹簧刚度;cs 为等效阻尼系数;kt 为轮胎的等效垂向刚度系数;u 为作动器输出的补偿力。
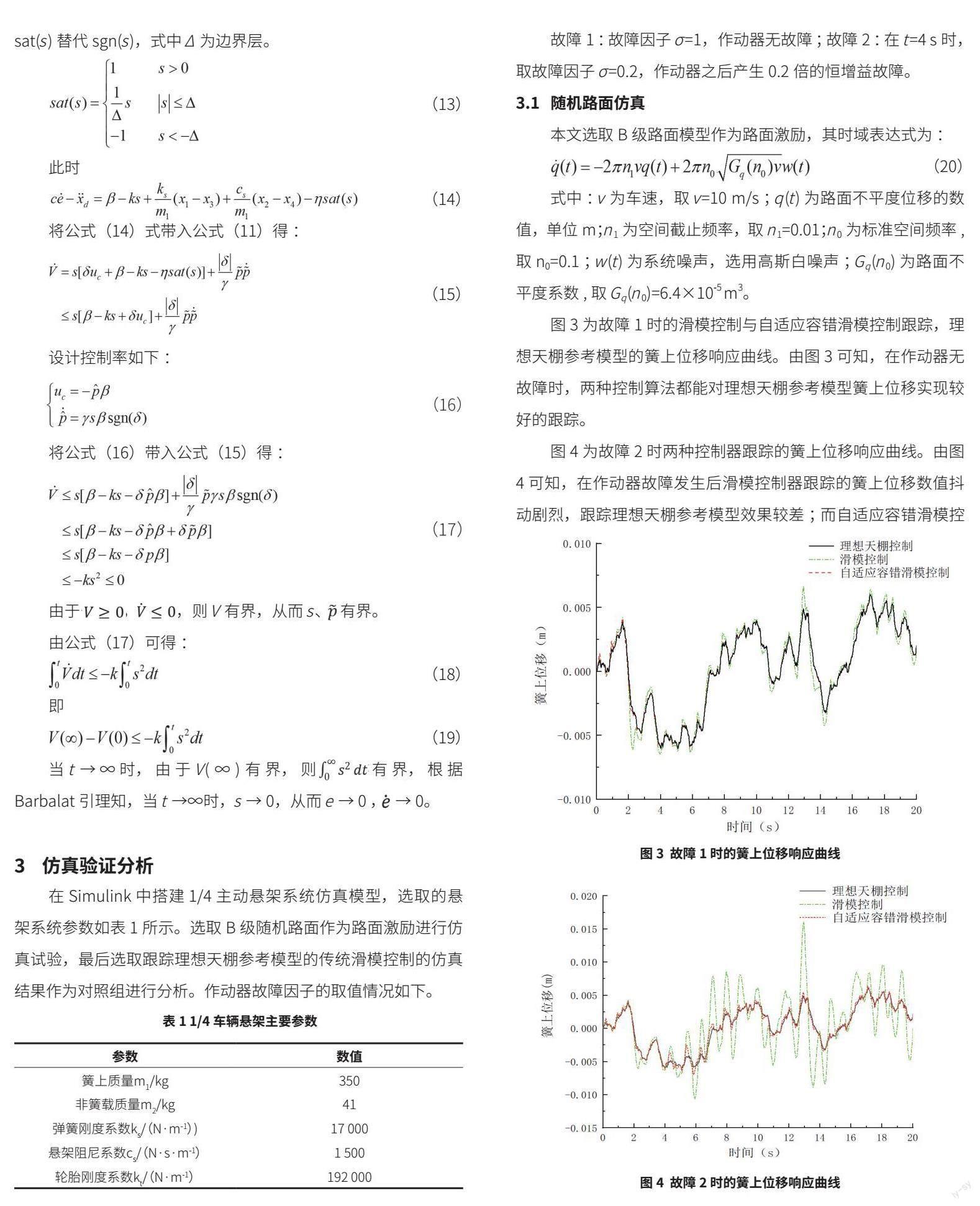
图3 为故障1 时的滑模控制与自适应容错滑模控制跟踪,理想天棚参考模型的簧上位移响应曲线。由图3 可知,在作动器无故障时,两种控制算法都能对理想天棚参考模型簧上位移实现较好的跟踪。
图4 为故障2 时两种控制器跟踪的簧上位移响应曲线。由图4 可知,在作动器故障发生后滑模控制器跟踪的簧上位移数值抖动剧烈,跟踪理想天棚参考模型效果较差;而自适应容错滑模控制器经过约2.5 s 后恢复至无故障时的跟踪效果,体现了较好的鲁棒性。
图5 为故障1 时的车身垂向加速度响应曲线。由图5 可知,两种控制算法控制下主动悬架车身垂向加速度响应曲线接近,因而在作动器无故障时两种控制算法控制效果大致相同。
图6 为故障2 时的车身垂向加速度响应曲线。从图5 中可以看出,在4 s 后作动器出现故障。相较于传统滑模控制,配置有自适应滑模容错控制器的主动悬架车身垂向加速度响应曲线幅值更小,鲁棒性能更好,提高了悬架系统的控制可靠性。
故障1 与故障2 情况下,主动悬架车身垂向加速度均方根值如表2 所示。在故障1 时,作动器无故障,两种控制算法控制下车辆垂向加速度均方根值相同;在故障2 时,作动器发生故障时,配置有自适应容错滑模控制器的主动悬架相较于传统滑模控制,其车身垂向加速度均方值降低了11.1%,很好地改善了车辆乘坐舒适性,悬架系统鲁棒性能更好,验证了其容错性能的有效性。
4 结束语
本文以1/4 主动悬架模型作为研究对象,针对主动悬架作动器故障对主动悬架系统控制可靠性的影响,设计了一种自适应容错滑模控制器,使主动悬架系统对作动器故障不敏感,提高了主动悬架系统的鲁棒性能。为了对所设计的控制器的有效性进行验证,在Simulink 中搭建了1/4 主动悬架系统仿真模型,选取B级仿真路面激励进行了仿真验证。仿真研究结果表明,在作动器无故障时,所设计的控制器与跟踪理想天棚控制的滑模控制器控制效果大致相同。但在作动器发生故障后,对比传统滑模控制算法,所提出的自适应容错滑模控制器的鲁棒性能更好,有效地改善了车辆的乘坐舒适性和主动悬架系统的控制可靠性。
【参考文献】
[1] 霍东东. 油气悬架主动控制与状态估计研究[D]. 北京: 北京理工大学,2015.
[2] 陈学文, 张衍成, 李萍, 等. 汽车主动悬架自适应模糊PID 控制研究[J]. 机械设计与制造,2014(02):153-156.
[3] 李德仓, 彭伟尧, 胥如迅, 等. 高速列车主动悬架滑模容错控制器设计[J].现代制造工程,2022,(09):40-47.
[4] 刘树博, 周焕银, 罗先喜, 等. 主动悬架非线性滑模容错控制研究[J]. 东华理工大学学报( 自然科学版),2016,39(03):293-297.
[5] 杨柳青, 陈无畏, 汪洪波. 基于H_2/H_ ∞控制的汽车主动悬架最优鲁棒容错控制[J]. 中国机械工程,2012,23(24):3013-3019.
[6] Rongrong Wang,Hui Jing,Hamid Reza Karimi, et al. Robust faulttolerantH ∞ control of active suspension systems with finitefrequencyconstraint[J].Mechanical systems and signal processing,2015,62-63(10):341-355.
[7] H Li,H Gao,H Liu,M Liu.Fault-tolerant H_ ∞ control for activesuspension vehicle systems with actuator faults[J].Proceedings ofthe Institution of Mechanical Engineers,2012,226(3):348-363.
[8] 高振刚, 李晓雪, 曹宇等. 基于作动器故障估计的汽车主动悬架容错控制研究[J]. 内蒙古大学学报( 自然科学版),2016,47(05):533-541.
[9] 寇发荣, 武江浩, 许家楠等. 整车电磁混合主动悬架故障诊断与容错控制研究[J]. 振动与沖击,2022,41(04):101-109.
[10] 孙晋伟, 刘秋, 顾亮. 主动悬架的二阶滑模容错控制研究[J]. 机械科学与技术,2021,40(09):1370-1377.
作者简介:
赵培通,硕士研究生在读,研究方向为汽车底盘电子控制技术。