
动车段调车作业侵入列车进路安全防范技术研究
2024-03-20 02:00:26寇亚洲冯军华王琳付紫彪
铁道通信信号 2024年3期
寇亚洲,冯军华,王琳,付紫彪
动车段(所)作为动车组检修养护的重要基地,对保障动车组安全稳定运行起着重要作用。动车段(所)内存在大量的接发车及调车作业,具有作业量大,作业时段集中等特点。近年来,调车作业侵入列车接、发车进路的事故时有发生[1]。目前动车段(所)在站场设计时主要采用设置隔开设备或锁闭道岔等方式形成进路隔离,用以防范出现调车侵入列车进路造成安全事故的情况。对于没有设置隔开设备的线路,主要依靠作业人员人工判断,极易出现车务作业人员因客观不清楚或主观违章蛮干,导致发生调车作业侵入列车进路的安全问题。
动车段(所)控制集中系统(Control Centralized System, CCS)是装备在动车段(所)保障动车组高效检修、安全运营、合理调度的现代化行车指挥系统[2],实现接发车与调车作业的综合自动化。目前,CCS尚不具备调车侵入列车进路的安全防范检测,为防范上述安全隐患,做到事前检测,实时监视,提出一种基于作业计划的调车侵入列车进路安全防范技术方案。下文将从技术方案、算法实现、仿真验证3个方面进行详细论述。该方案的实现对确保动车段(所)内接发车及调车作业的安全、有序、平稳运行具有重要意义。
1 技术方案
《铁路技术管理规程》(高速铁路部分)第319条规定:接发旅客列车时,与接发列车进路没有隔开设备或脱轨器的线路,不准向能进入接发列车进路的方向调车[3]。调车冒进信号对列车进路是否存在侵入风险,主要由调车冒进信号后走行的延续通路决定。当延续通路与接发车进路构成平行路径,不存在区段设备占用冲突,则不存在侵入列车进路风险。若延续通路与接发车进路存在区段设备占用冲突,则可能引发安全隐患。本文以雄安动车运用所为例,针对调车冒进信号侵入列车进路场景进行分析,结合CCS既有作业计划过程控制,提出相应安全防范措施。
1.1 场景分析
1.1.1 作业范围划分
雄安动车运用所作为承担京雄城际铁路动车组维修养护的重要基地,根据所内功能设置的不同,其站场可分为存车线、人工清洗线与检查库线(简称“清洗检查线”)、综合维修基地3个部分。其中,存车线承担动车组接发车的停放作业,清洗检查线主要完成动车组的检修整备及清洗作业,综合维修基地用于除动车组外的其他车列的停放作业。依据站场划分,雄安动车运用所接发车及调车作业具体内容如下。
1)接发车作业:出入口↔存车线,出入口↔综合维修基地;
2)调车作业:存车线↔清洗检查线、综合维修基地↔存车线、综合维修基地↔综合维修基地、存车线↔存车线、清洗检查线↔清洗检查线。
其中,综合维修基地↔存车线、综合维修基地↔综合维修基地、存车线↔存车线、清洗检查线↔清洗检查线均为调车折返作业。
图1为调车冒进信号侵入列车进路示例,0G100次动车组运行经过99#道岔反位到达I-23G1。CR400BF-A-3031动车组冒进SI-22调车信号后,若继续沿着延续通路走行,将存在侵入0G100次动车组接车进路的风险。因此,梳理雄安动车运用所内可能存在调车作业冒进侵入接发车作业的情况,见表1。雄安动车运用所综合维修基地设有安全线隔开设备,且安全线道岔常态处于定位,故涉及综合维修基地范围的调车作业在冒进信号后将进入安全线,不会对接发车作业产生侵入影响。同时CCS对不同计划间是否存在进路冲突已具备自动检测功能。故表1仅考虑动车组以冒进信号方式引起的侵入情况。
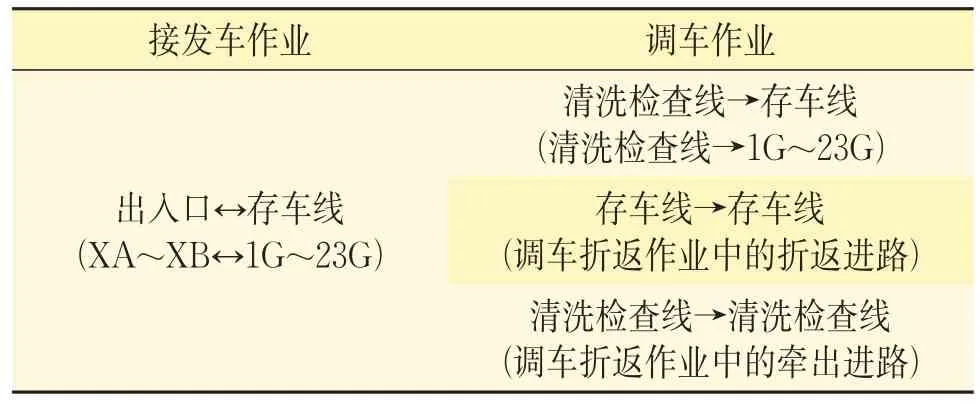
表1 调车作业冒进侵入接发车作业
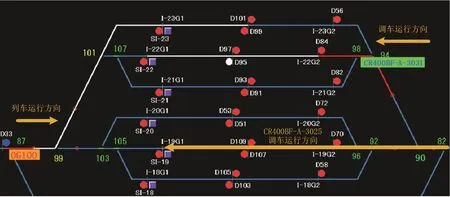
图1 调车冒进信号侵入列车进路示例
1.1.2 作业场景划分
CCS依据作业计划执行进程,将作业计划执行状态划分为“待执行状态”和“正在执行状态”。“待执行状态”指作业计划进路指令未建立;“正在执行状态”指计划进路指令已建立且进路轨道区段未占用或进路轨道区段已占用2种情况。根据作业计划执行状态的划分,接发车作业计划与调车作业计划执行状态组合见图2。以图中的箭头为例,“接车计划为正在执行状态,调车计划为待执行状态”即列车正在进行接车作业,此时值班员若对其他车办理调车作业,需考虑是否具有侵入列车进路的风险。
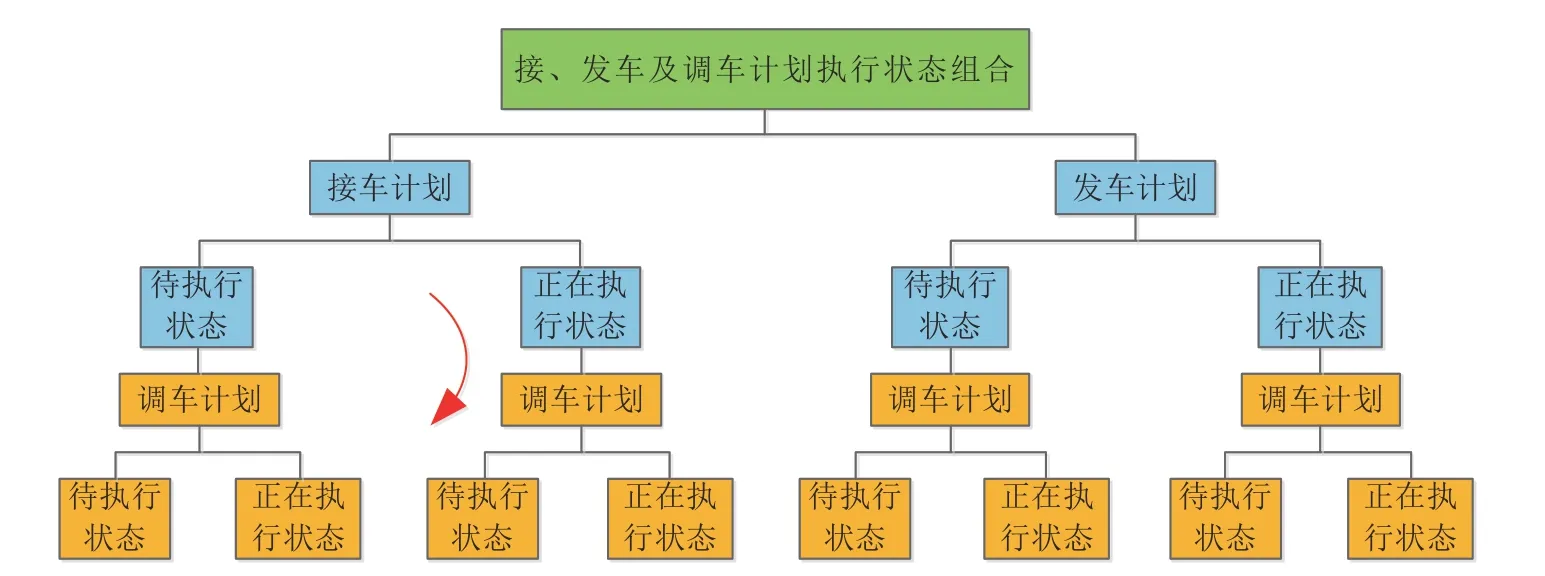
图2 接发车作业与调车作业计划执行状态组合
1.2 延续通路冒进侵入判断
实现调车冒进侵入风险自动检测功能需要解决的核心技术问题是对调车冒进信号后延续通路的搜索判断。调车在冒进信号后,可能走行的区段设备包括道岔区段与无岔区段。其中,道岔区段受道岔类型与道岔所处位置限制,对延续通路搜索判断的影响更为复杂。对于单动道岔,当调车作业延续通路与接发车作业进路形成敌对关系,则判定冒进侵入。对于联动道岔,当调车作业延续通路与接发车作业进路形成平行关系,则判定不存在冒进侵入,否则具有冒进侵入风险。图1示例中CR400BF-A-3031动车组冒进调车信号后,可能以“挤岔方式”通过101道岔,从而侵入列车进路,该情况即为冒进侵入。此外,针对接发车作业计划与调车作业计划均未执行的情况,在判断调车冒进的延续通路是否侵入接发车进路时,需以接发车作业进路建立后的道岔位置状态作为侵入判断依据。
当判断延续通路时,若道岔处于转换中间状态,则停止判断,待道岔转换完毕后再继续判断。延续通路冒进侵入的搜索判断以站场进站信号机为终止。
1.3 防范措施
通过上述场景分析,为实现对冒进侵入风险的事前检测与实时监视,将防范措施分为两大类:一是作业计划执行前的防错办检查;二是作业计划执行中的报警提示。
作业计划执行前的防错办检查,是将调车作业计划冒进侵入作为计划自触的检查条件,为防止作业计划对应的进路指令错误触发,CCS在作业计划办理前进行检查,并给予现场操作人员对应的冒进冲突提示。作业计划执行中的报警提示,指CCS对已在执行中的作业计划进行实时监视,当出现冒进侵入风险时,及时向现场操作人员进行报警提示。
根据作业现场岗位设置,上述防范措施的提示信息将以弹窗形式展示给车站值班员。同时结合现场作业效率,对距当前时间15 min以后的作业计划的冒进侵入风险不予考虑,因为此时形成了进路的时间隔离,不构成安全隐患。
2 算法实现
铁路车站站场拓扑结构具有方向性,且站场信号设备之间具有前后的连接关系[4]。考虑到调车冒进信号后需完成延续通路的搜索及判断延续通路是否构成侵入,本文采用动态有向无环图算法实现上述功能。
2.1 模型建立
有向无环图由若干顶点和边组成,每条边都从一个顶点指向另一个顶点,沿着这些顶点的方向不会形成闭合环路。动车段(所)站场主要由信号机、道岔、轨道区段组成,这三者存在逻辑连接关系。搜索延续通路时,沿着调车冒进信号后的走行方向,根据道岔位置状态,不断查找下一设备直至搜索结束,搜索过程不存在回路。因此,动车段(所)站场可抽象为有向无环图模型,延续通路的搜索可转化为对站场有向无环拓扑结构的遍历[5-7]。
根据有向无环图理论,将信号机、道岔、轨道区段中的股道与无岔区段抽象成顶点集,设备之间的连接关系抽象成边集。站场的有向图模型为G=(V,E),其中V为顶点集,E为边集。因站场图的行车方向分为上行、下行,所以上述顶点集合中的3种设备可抽象为图3中的设备模型。
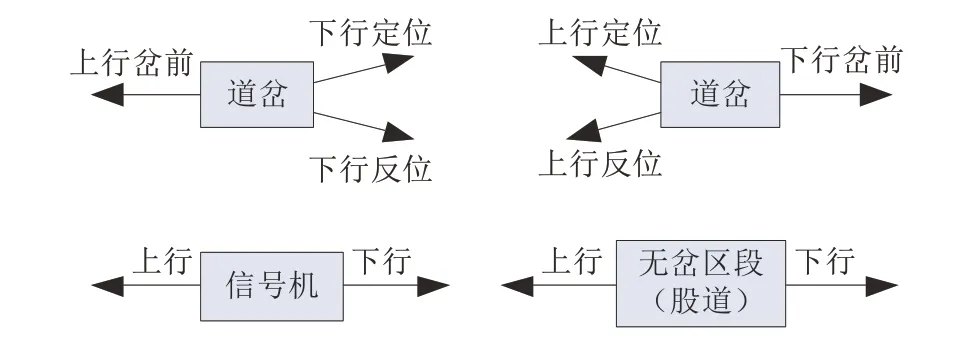
图3 设备模型
为准确描述设备模型,便于后续延续通路的快速搜索,上述设备模型按照基础属性、动态属性与方向属性进行统一,见表2。
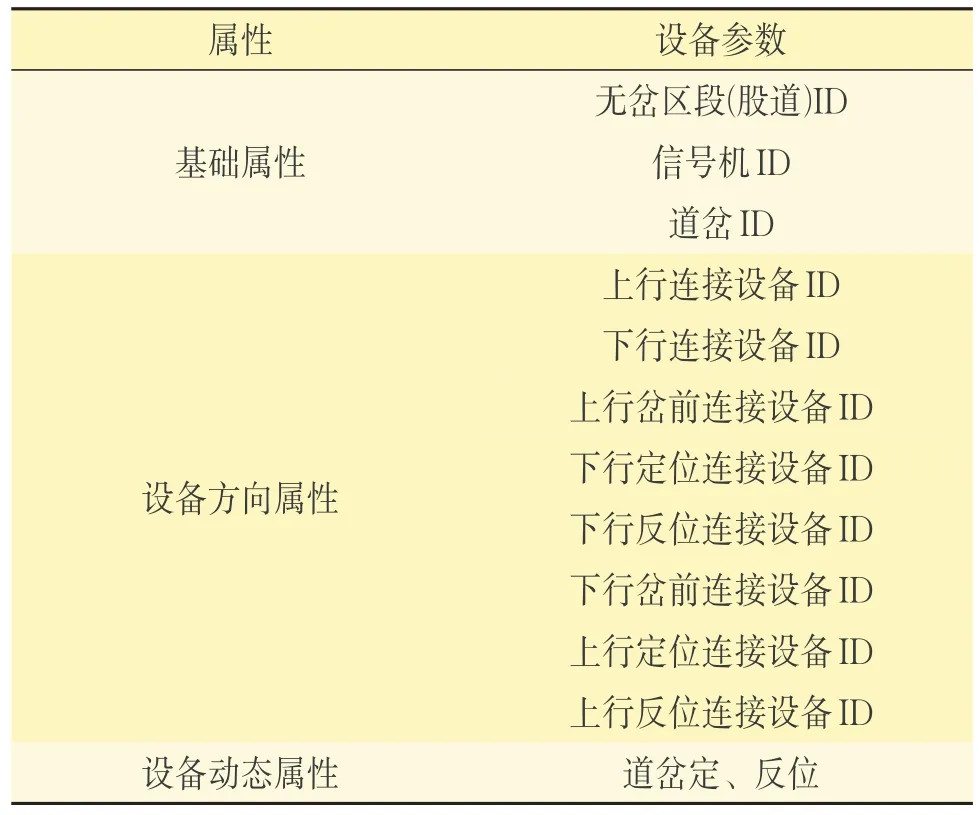
表2 设备模型属性
除抽象顶点集外,将两相邻设备间的连接关系抽象为动态连接模型Wi=g(Vi,Vi+1)。其中,Wi为邻接顶点间的连通权值,权值为1表示两邻接顶点连通,权值为∞表示不连通;g为邻接顶点间的权值计算函数,受顶点Vi的动态属性影响,动态影响因素为站场道岔实时位置状态与计划排列时道岔转换位置状态。
综上所述,起始顶点到任意顶点设备间的动态联通模型为Ci=Connect(Vi,V0,W)。其中,V0为起始顶点,Vi为任意顶点,W为邻接边连通权值的串联集合,Ci为起始顶点到任意顶点设备间的动态联通值。根据上述定义,建立雄安动车运用所站场局部动态有向无环图模型,见图4。图4中包含上、下行2个方向,延续通路搜索时仅为单向搜索。

图4 雄安动车运用所站场局部动态有向无环图模型
2.2 算法实现
依据上文建立的动态有向无环图模型,将延续通路的搜索抽象为动态有向无环图中从起始顶点V0求解生成树的问题。将调车走行方向作为延续通路搜索方向,调车进路的调车阻挡信号作为延续通路的搜索起点V0,结合接发车联动道岔、“挤岔方式”侵入等影响因素,动态计算连通权值,建立树的栈(stack)存储结构,压栈记录搜索树结果。
多条调车计划冒进延续通路的搜索进一步抽象为从多个起始顶点Vn求解生成森林的问题。所以调车侵入列车进路可抽象为列车计划进路设备链表和生成树或生成森林的设备重叠问题。延续通路搜索算法流程见图5。
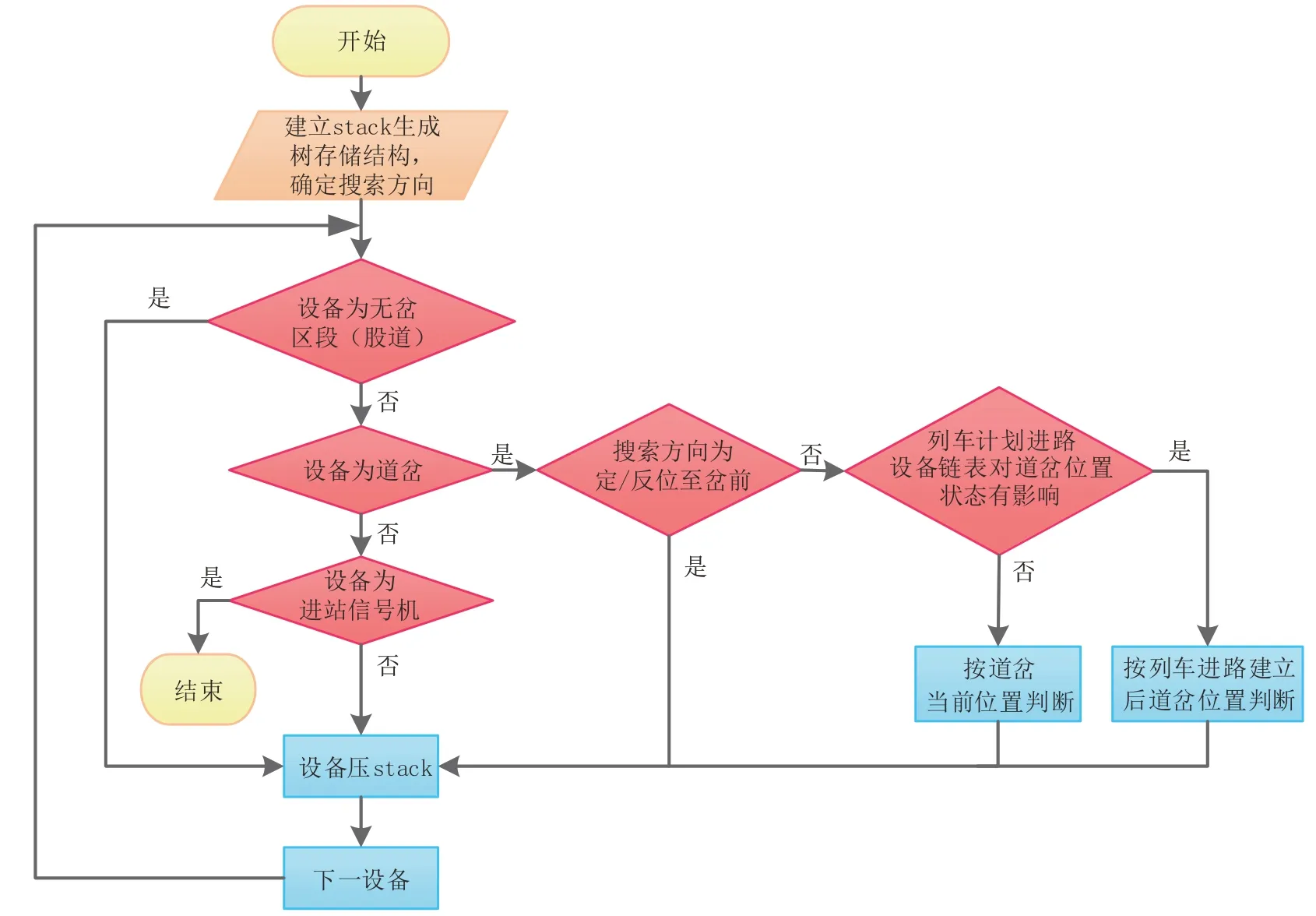
图5 延续通路搜索算法流程
3 仿真验证
3.1 仿真测试平台搭建
基于既有CCS系统架构,依托虚拟仿真平台,在实验室搭建仿真测试平台,总体架构见图6。数据配置采用雄安动车运用所站场数据,对本文所述调车冒进侵入列车进路安全防范技术的准确性与可靠性进行验证。
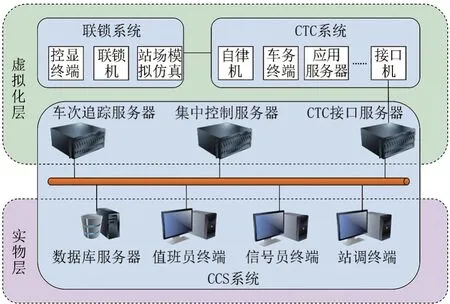
图6 仿真测试平台总体架构
仿真测试平台划分为虚拟化层与实物层两部分。联锁系统、CTC系统与CCS的应用服务器(车次追踪服务器和集中控制服务器)及CTC接口服务器均采用虚拟化方式搭建[8-9]。CCS的操作显示终端(值班员终端、信号员终端、站调终端)与数据库服务器采用实物搭建[10]。仿真测试时,通过联锁系统的仿真软件占压或出清轨道区段实现动车组现场实际走行场景的仿真模拟[11-12]。由于CCS的值班员终端用于实现接发车计划与调车计划的签收、计划指令方案的展示调整、接发车计划闭塞手续的办理与动车组作业过程的监视等功能[13-14],且技术方案基于作业计划实现,因此,相应报警防范措施以提示窗口形式显示在CCS的值班员终端界面上。
3.2 防错办检查测试
防错办检查功能是针对待执行的调车计划在触发时侵入列车进路的风险检测。根据接发车计划执行状态的不同及冒进冲突位置的不同,防错办检查功能的具体场景细化见表3。
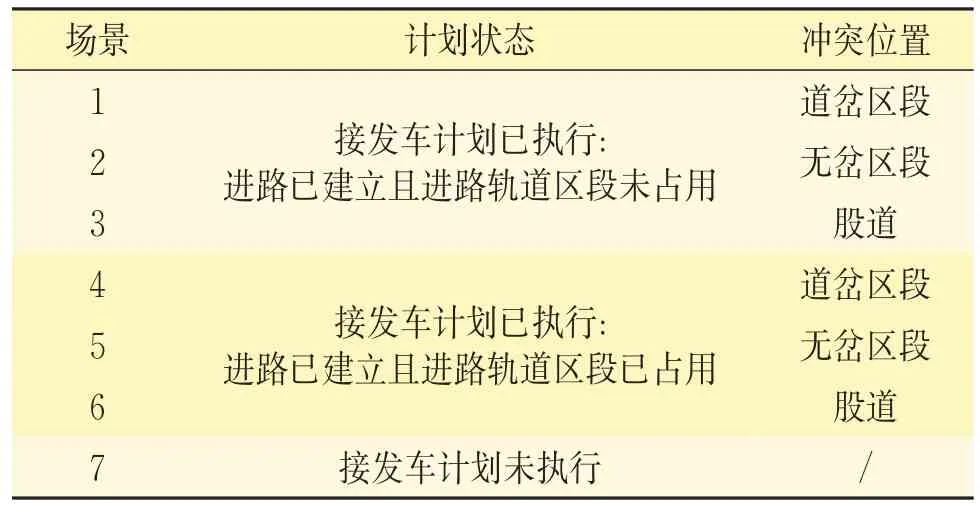
表3 防错办检查功能测试场景
结合图1所示,以表3的场景4为例,待执行的调车计划CR400BF-A-3025触发时,查找该计划的延续通路,若道岔105与103处于定位,调车计划延续通路将与已执行的接车计划0G100存在设备冲突,调车计划CR400BF-A-3025将存在冒进侵入风险。因此,自动触发调车计划CR400BFA-3025时,进行防错办检查,车站值班员终端将提示“调车计划进路在设备99处无隔开设备”,见图7。

图7 防错办检查提示
3.3 执行中报警测试
执行中报警功能是针对调车计划处于正在执行状态时,系统可实时检测判断存在的调车冒进侵入列车进路的风险,并给予作业人员报警提示,具体场景见表4。
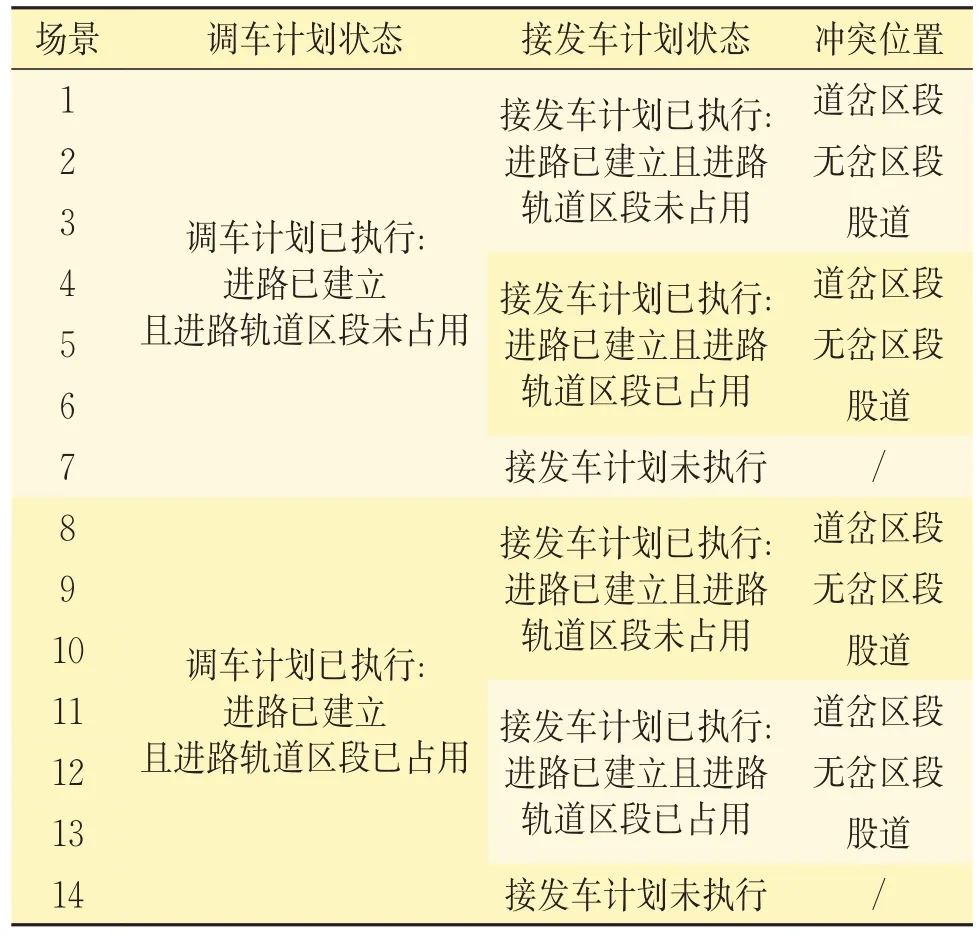
表4 执行中报警功能测试场景
结合图1所示,以表4中的场景11为例,若道岔107处于定位,已执行的调车计划CR400BF-A-3031其延续通路与已执行接车计划0G100存在设备冲突。车站值班员终端界面进行报警提示“(CR400BF-A-3031)与设备101处有冒进冲突”,见图8。该报警提示框持续弹出时间为30 s,并伴有语音报警提示。
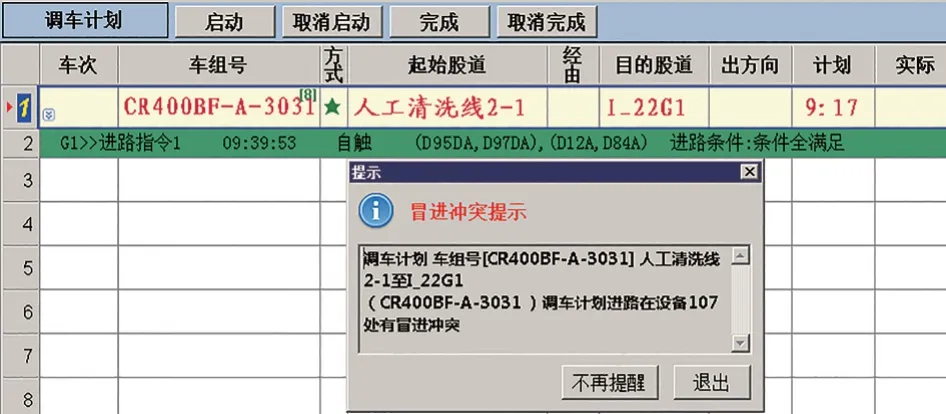
图8 执行中报警提示
4 结束语
本文针对高铁动车段(所)人为调车作业侵入列车进路的安全风险问题,提出基于作业计划的调车侵入列车进路安全防范技术方案。该方案依托CCS,采用动态有向无环图技术,实现调车冒进侵入列车进路场景下,对侵入风险的主动提示与实时报警。该方案的实现对保障动车段(所)内接发车及调车作业的安全、有序、平稳运行具有重要作用,对后期在动车段(所)及高铁车站的推广具有重要意义。
猜你喜欢
军事文摘(2021年18期)2021-11-25 12:18:53
有色设备(2021年4期)2021-03-16 05:42:32
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:08
铁道通信信号(2018年9期)2018-11-10 03:26:36
减速顶与调速技术(2018年4期)2018-08-27 10:02:46
铁道通信信号(2018年1期)2018-06-06 02:27:39
学苑创造·A版(2018年12期)2018-03-04 06:57:06
铁道通信信号(2016年2期)2016-06-01 12:10:18
铁路技术创新(2015年3期)2015-12-21 12:55:48
读写算(中)(2015年25期)2015-11-07 07:25:43
