
基于CNN-LSTM 模型的车辆换道前跟驰研究
2024-03-19 11:46潘公宇
重庆理工大学学报(自然科学) 2024年2期
潘公宇,马 斌
(1.江苏大学车辆产品实验室,江苏 镇江 212013;2.江苏大学汽车与交通工程学院,江苏 镇江 212013)
0 引言
跟驰和换道是两类常见的驾驶行为。换道前车辆跟驰行为不仅要考虑本车道前车的状态,还要考虑目标车道前车的状态[1],不合适的跟驰行为会导致事故发生、交通拥堵和延误[2]。因此,需要更准确地描述车辆跟驰的运动状态,以便控制跟驰行为、提高运行效率和稳定性[3],并为智能车辆的轨迹规划提供指导[4]。
目前车辆跟驰模型主要分为理论驱动类跟驰模型、数据驱动类跟驰模型[5]。理论驱动类跟驰模型具有较好的可解释性,其中IDM模型能够表征多种交通流情况下的车辆跟驰状态,但由于车辆的跟驰状态受驾驶员性格、外部环境等诸多因素影响,因此基于表达式固定的跟驰模型难以真实反映各种跟驰情况[6]。目前,学者对传统IDM模型进行了许多改进,如在传统驾驶特性角度综合考虑驾驶人的因素、前车加速度、车间距、道路状况等因素。肖新平等[7]提出了IDM-GARCH模型。该模型考虑了速度差刺激项、非对称系数和速度波动异方差性等因素,不仅提高了模型精度,而且能够准确反映后车速度波动的趋势和幅度。邓红星等[8]在经典IDM模型的基础上,引入驾驶员反应时间、反应车型特征的期望跟驰间距系数以及前车加速度信息对IDM进行了改进,提出了一种AIDM模型。该模型能够进一步提高交通流的稳定性,有效抑制交通拥堵。数据驱动类跟驰模型着重于挖掘真实车辆行驶数据中隐藏的内在规律,从信息中提取车间的隐式交互依赖关系,再通过LSTM等对序列的时序关系进行处理,能够实现较高精度的意图识别或运动预测。赵健等[9]提出了一种数据机理混合驱动的交通车意图识别方法,从被识别车辆驾驶人的角度出发,分析其从产生驾驶意图到完成驾驶意图的全过程。Li等[10]提出了一种混合跟驰模型,该模型融合了具有良好驾驶行为预测能力的长短期记忆网络和自适应卡尔曼滤波标定后的智能驾驶人模型。
综上所述,IDM适用于描述一般情况下无换道意图和换道行为车辆的跟驰状态。笔者通过对换道前车辆跟驰轨迹的分析,发现有换道意图的车辆在换道前其跟驰行为与正常状态下的跟驰行为存在较大差异,因此需要寻求新的模型对车辆换道前跟驰状态这一特殊情况进行描述。
笔者基于NGSIM数据集对换道车辆跟驰轨迹进行分析,通过对比有无换道意图的跟驰行为,首次提出换道车辆“换道前跟驰”概念,确定并验证了换道前跟驰阶段的特殊性,试图搭建CNNLSTM组合模型,对此特殊跟驰阶段做出精准的描述,希望能够为后智能车辆换道轨迹规划、跟驰行为控制等研究提供新的思路与方法,同时有助于模拟和预测交通流的行为和特征,提高道路交通的效率和安全性。
1 NGSIM 车辆轨迹数据
1.1 NGSIM 数据集介绍
NGSIM数据集是由美国国家交通安全委员会(NTSB)在2005—2009年期间收集的交通数据集。该数据集涵盖了美国6个城市的高速公路和城市道路上的交通情况,包括车辆轨迹、速度、加速度、车道位置等信息。数据采样间隔为0.1 s,具有高精度和高分辨率,被广泛应用于模型标定、车辆行为决策、车辆轨迹预测、交通流模拟、交通安全分析等。由于NGSIM数据集的独特性和重要性,许多研究人员将其作为基准数据集来评估不同方法的性能[11-12]。表1为NGSIM数据集中各项原始参数及意义。
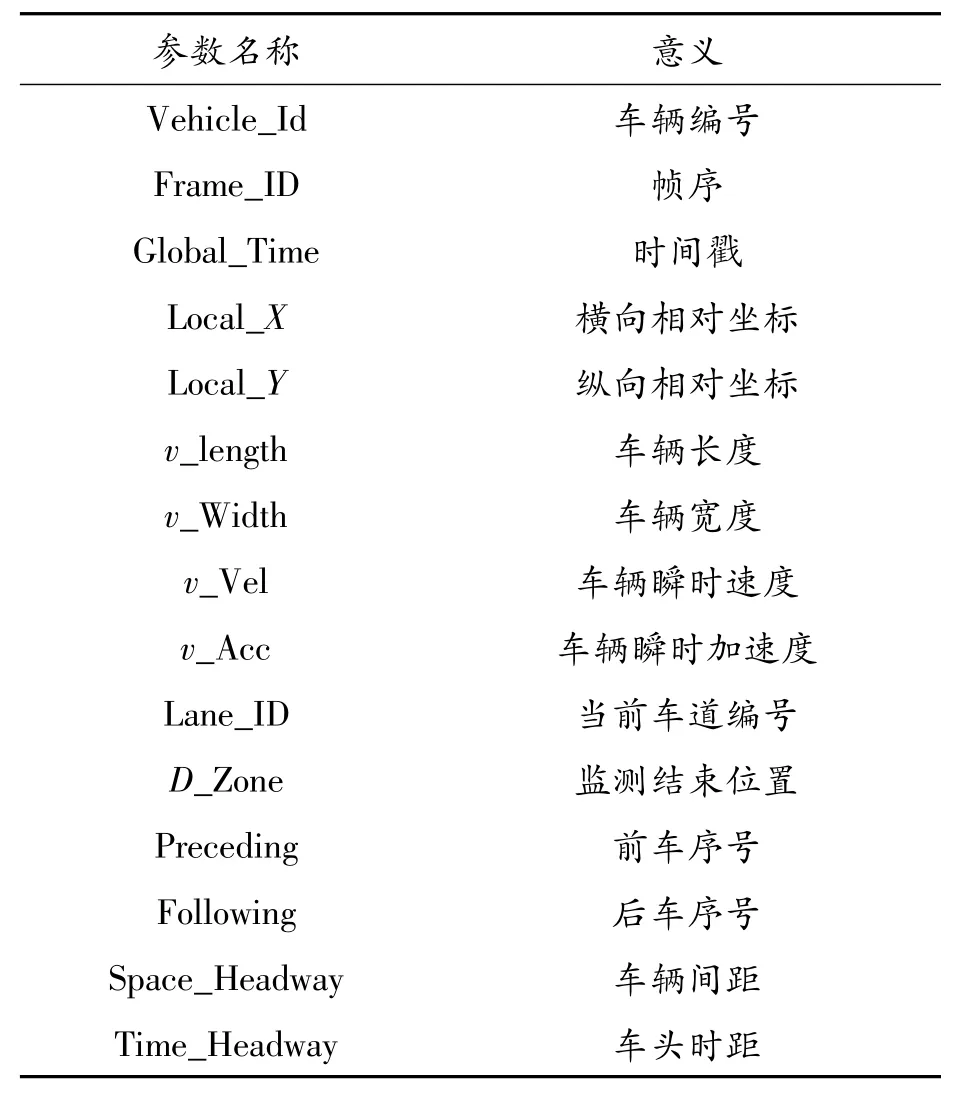
表1 数据集部分参数
1.2 跟驰数据筛选
为保证用于参数标定的车辆轨迹数据包含充足完整的车辆跟驰的信息,需对原始数据进行筛选,挑选出合适的跟驰对。筛选原则如下:
1)车队的跟驰时间至少30 s,以保证有足够多的模型训练样本。
2)车队中的车辆为同种类型,以避免不同车型跟驰特性可能存在的差异。本文中仅研究class为2,即汽车-汽车跟驰情况。
3)车辆跟驰后产生完整换道行为,视换道时车辆车道信息发生改变即为存在完整换道行为。
4)排除行驶于多车辆车道和匝道的跟驰车队,保证所研究车队的驾驶特性一致性。
5)连续换道行为具有极大不确定性与随意性,排除发生连续换道行为车辆与跟驰阶段横向位移波动过大的车辆,以免不良驾驶习惯与随意换道行为对研究产生影响。
经过筛选后,获得完整“跟驰+换道”轨迹843条,其中向左换道轨迹524条,向右换道轨迹319条,向左换道轨迹占全部轨迹数量的62.2%,为避免向左、向右不同方向换道轨迹在数据收集道路上可能存在的差异性状态,故后续对524条向左换道轨迹进行研究。
2 换道前特殊跟驰运动状态分析
对第二节选取的换道轨迹进行分析研究,发现换道车辆在实施换道行为前的一小段时间内,车辆跟驰行为与正常状态下的跟驰行为有明显的差异。为研究此特殊跟驰阶段的车辆运动状态,对换道车辆从跟驰至完成整个换道行为的轨迹进行划分,将换道行为发生前的一小段跟驰阶段称为“换道前跟驰阶段”,将剩余无换道意图的跟驰阶段称为“基本跟驰阶段”。“换道前跟驰”阶段的确定有助于更好地研究换道车辆在换道行为发生前的特殊跟驰状态,能够为后续进行换道轨迹规划与跟踪控制等工作提供新思路。
2.1 意图识别点与“换道前跟驰阶段”轨迹划分
通过对车辆换道过程中的斜率进行分析,发现绝大多数车辆换道行为产生前,车辆轨迹都会有较明显的反向移动现象,现有研究多以车辆换道前横向速度为依据判定车辆换道观测点[13]。通过建立车辆跟驰-换道轨迹的位移、横向速度、纵向加速度等特征轨迹,可以看出车辆从跟驰至换道阶段,波动幅度最大为横向位移与纵向加速度。如图1所示,以车辆换道轨迹中斜率变化为依据,将换道过程中车辆斜率的第五八分位数作为换道观测点,以此观测点向前截取一段时间作为换道前跟驰阶段。为保证换道前跟驰阶段能够表征完换道前车辆跟驰的特殊状态,选取时间窗口长度为3 s,对整个换道前跟驰阶段的特殊状态全部表征。基于此,将整个跟驰-换道过程做如下划分:基本跟驰阶段、换道前跟驰阶段、换道阶段。
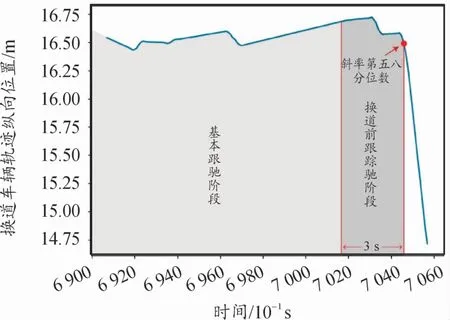
图1 换道前跟驰阶段划分示意图
2.2 “换道前跟驰”状态特殊性验证
为验证换道前跟驰与基本跟驰的运动状态差异性,选取换道前跟驰阶段车辆运动状态为第1组样本,随机选取3 s基本跟驰阶段状态数据为第2组样本。考虑数据分布特性与样本容量,采用z检验法对2组样本进行差异性分析。
首先分别计算2组样本中纵向速度、车头间距、横向坐标、纵向加速度的均值、标准差,结果分别如表2、表3所示。
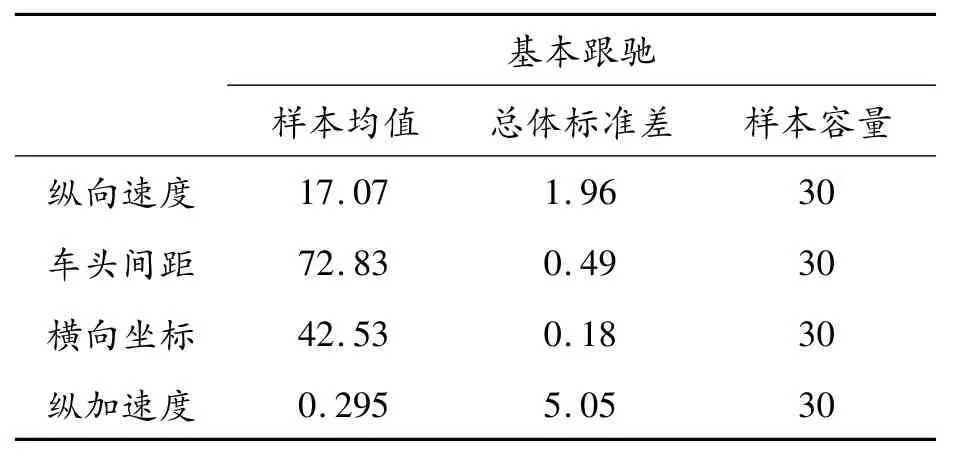
表2 两样本z检验数据
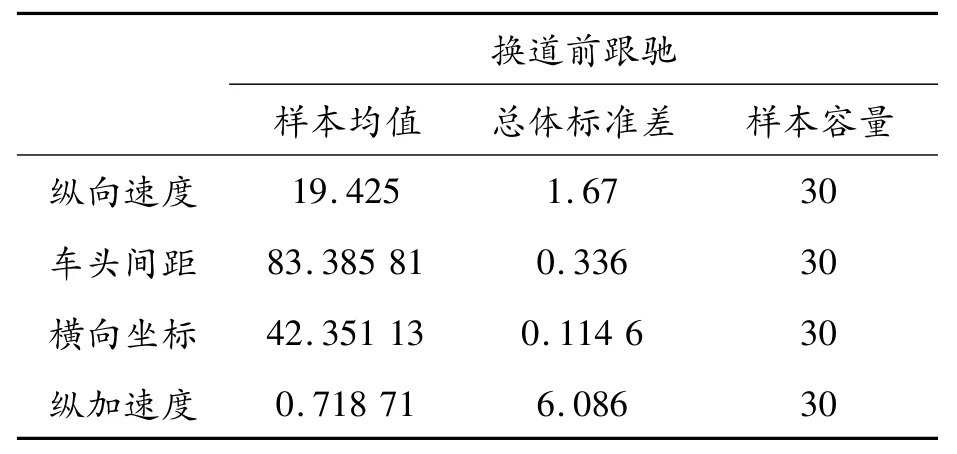
表3 换道前跟驰z检验数据
将所求得各值代入z值计算公式:
式中:x1为样本1均值,x2为样本2均值,μ1为样本1总体均值,μ2为样本2总体均值,μ1为样本1总体标准差,μ2为样本2总体标准差,n1为样本1容量,n2为样本2容量。
经过计算得出,2种样本的z值分别为:纵向速度为4.822,车头间距为-136.437,横向坐标为2.54,纵向加速度为-0.202。进一步分析z值可知,除加速度指标外,换道车辆在换道跟驰阶段和基本跟驰阶段中纵向速度、车头间距和横向位移的状态差异非常显著,因此,传统的跟驰模型不再适用于换道车辆进行换道前的跟驰行为,需要寻求新的方法来实现换道前跟驰模型的拟合。
3 CNN-LSTM 组合模型搭建与超参数设置
CNN-LSTM网络是一种深度学习模型,其在许多领域都有应用,如自然语言处理、语音识别、视频分析等[14]。它在对文本进行分类、情感分析、机器翻译等任务方面表现出色。它将卷积神经网络(CNN)和长短时记忆网络(LSTM)结合起来。CNN-LSTM网络在处理序列数据时具有很好的表现,因为它能够捕捉到数据的局部特征和长期依赖关系。该模型综合了单CNN和单LSTM的优点,既具备数据特征强提取能力,又能够良好地处理时间序列,因此更适用于换道前跟驰状态预测场景[15]。CNN-LSTM组合结构如图2所示。
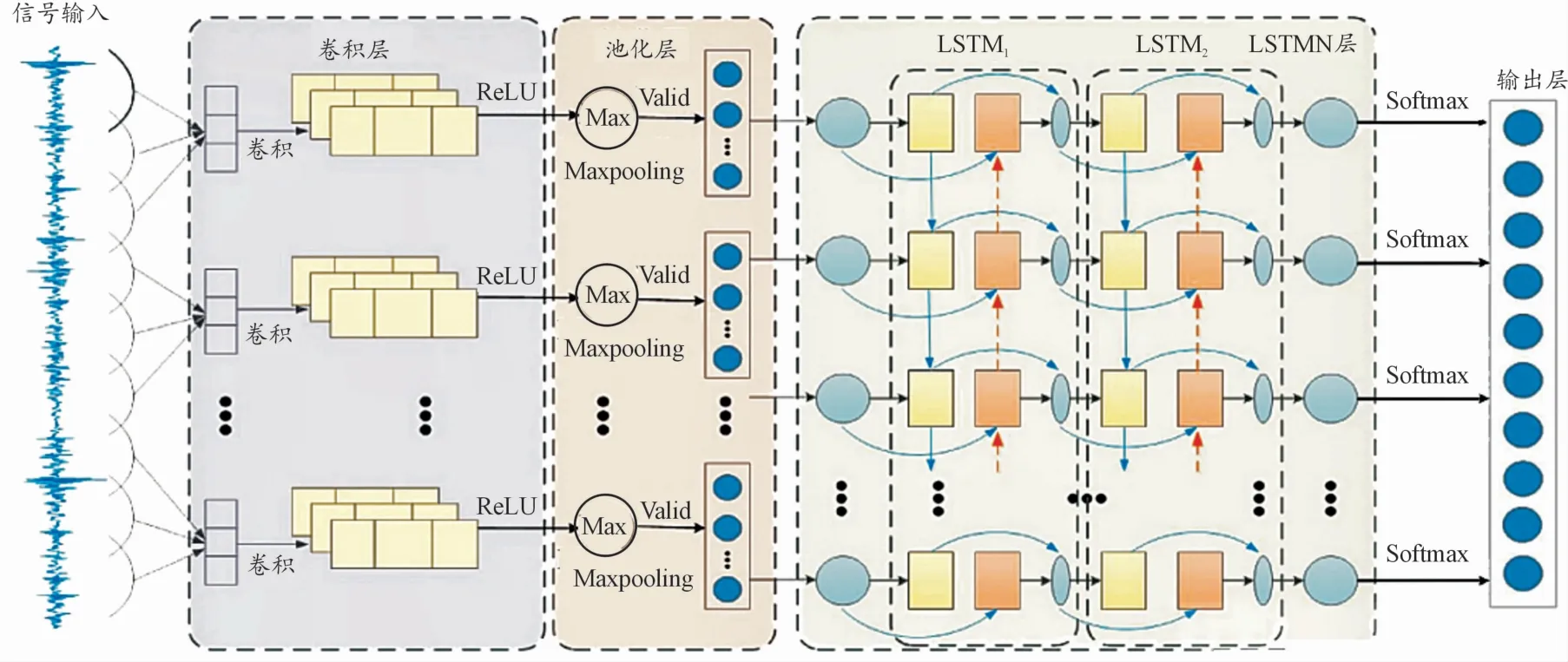
图2 CNN-LSTM模型结构示意图
3.1 模型输入特征选取
基于研究场景,主要考虑双车跟驰环境,暂不考虑邻车数据对研究的影响,即认为研究场景下原车道与目标车道仅存在当前跟驰车队,参考目前主流模型输入输出后[16],决定除本车速度、相对速度、车头间距外,再考虑车辆横向速度与横向偏移量为输入特征。选取输入:vx,vy,ay,Δv,Δy,l。选取输出:va。其中,vx为主车纵向瞬时速度,vy为主车横向瞬时速度,ay为主车纵向瞬时加速度,Δv为主车与前车相对速度,l为主车与目标车道的车道线之间的距离。
对模型各输入变量采用min-max归一化方法,公式如下:
式中:xmin为该特征最小值,xmax为该特征最大值。
3.2 网络模型搭建
本文中的组合模型由CNN卷积神经网络充当编码器,LSTM 作为解码器进行搭建。具体而言,CNN层由3个卷积层、1个池化层、1个Flatten层和1个全连接层组成;LSTM层由3个LSTM单元和1个全连接层组成。
主要流程如下:首先,将过去一段时间内的跟驰对运动状态等数据作为时间序列的输入特征;接着,CNN层在时间轴上对过去一段时间内的输入信息进行卷积操作,从中提取其映射关系;最后,将CNN层在各个时间点上的输出作为LSTM网络的输入序列,利用LSTM层挖掘出主车换道前跟驰状态变化的规律并进行预测。
3.3 CNN-LSTM 组合网络超参数设置
3.3.1 CNN超参数确定
通过对CNN网络的不断调整,该模型采用linear函数作为激活函数,采用小批量训练法(batch_size=2)进行训练,采用Adam算法进行参数优化,学习率设为0.001。在构建CNN时,该模型尝试了尺寸为3、5、7的卷积核,卷积核数量设为8。经过实验,最优尺寸的卷积核大小为3×3,池化层的大小为2,并通过填充方式保持卷积层输出的大小不变。
3.3.2 LSTM超参数设置
对比了历史数据长度分别为2、5、10的情况,发现当采用较小的步长时,可以获得更高的预测精度。在本文中将步长设置为2步,即每个时间窗口包含了过去0.2 s内跟驰对两车辆的运动状态信息,并将初始学习率设置为0.01。优化算法为Adam。
神经网络结构的不同会对预测性能产生影响[17],尤其是LSTM层数的增加可以提高模型的学习能力和预测精度。然而,如果层数过多可能会导致模型过度拟合,因此需要在增加层数与避免过度拟合之间进行权衡[18]。逐步增加LSTM层数,比较不同LSTM层数时组合模型的性能,最终确定最优层数为3,每层神经元数量分别设为100、200、100。为了提高组合模型的运算速度并且防止模型过拟合,采用dropout方法,dropout设为0.1。网络训练中所采用的误差函数为均方误差函数RMSE,其表达式为:
式中:observedt为第t个样本的真实值,predictedt为第t个样本的预测值。
最终确定的CNN-LSTM组合模型网络结构包含一系列卷积层和最大池化层,之后进行展平和全连接操作,接着进行重塑操作,使用4个LSTM层并结合随机失活,最后通过激活函数输出预测结果。
4 模型仿真验证及对比分析
4.1 CNN-LSTM 组合模型仿真
选取70%的数据作为训练集,10%的数据作为测试集,20%的数据作为验证集,对第四节搭建的组合模型进行训练,对CNN-LSTM组合模型的跟驰效果进行验证。在前车的运动状态给定的条件下,首先初始化跟驰对中的各个参数,接下来通过模型的循环迭代求解得到每一时刻模型的输入值,通过循环迭代的方式更新后车的运动状态,基于python进行代码测试,随机展示某条换道轨迹仿真效果,如图3—图5所示。表4为CNN-LSTM模型仿真效果。
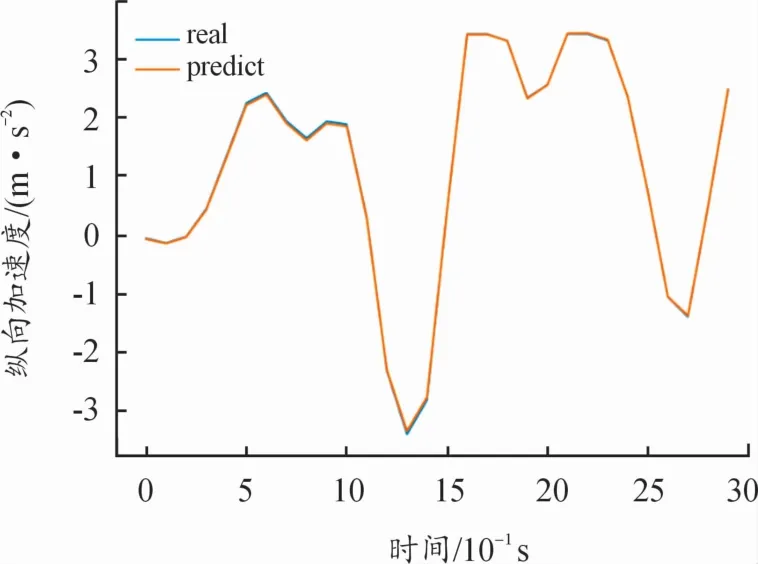
图3 CNN-LSTM纵向加速度仿真效果
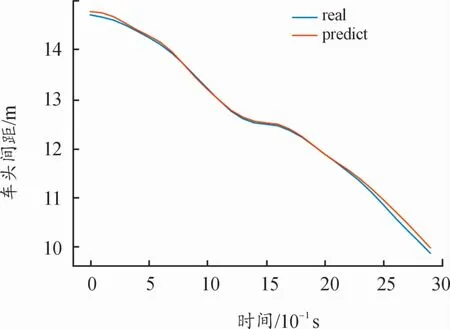
图4 CNN-LSTM车头间距预测效果
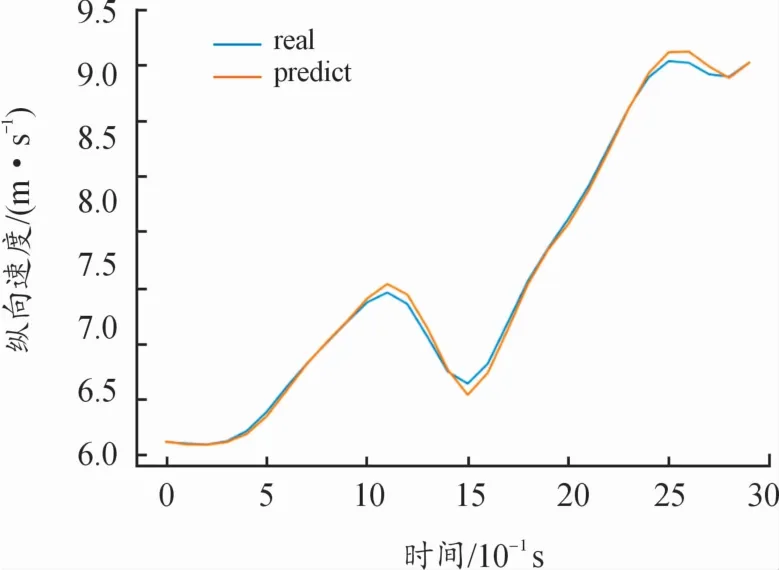
图5 CNN-LSTM纵向速度仿真效果
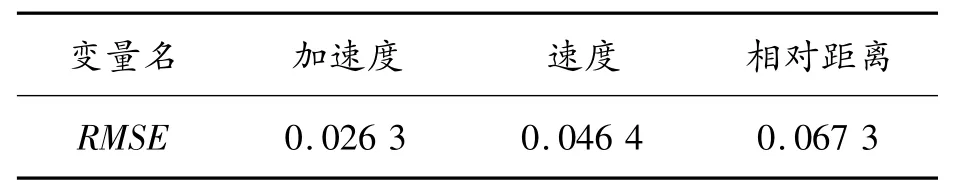
表4 CNN-LSTM模型仿真效果
对所有测试集进行测试并对结果进行计算,以均差和标准差来反应模型预测效果,如表5所示。
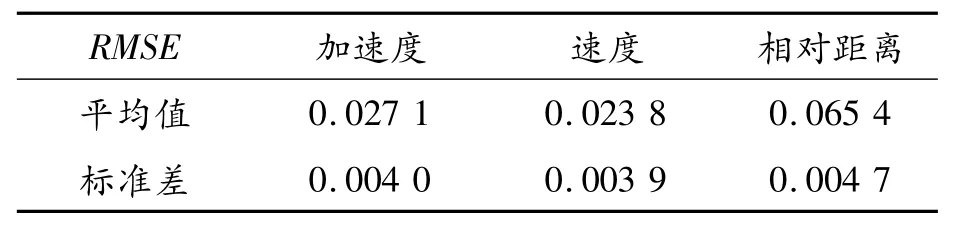
表5 模型预测效果
4.2 换道前跟驰IDM 模型仿真与对比
车辆跟驰IDM(intelligent drivermodel)是一种基于车辆动力学和交通流理论的模型,用于研究车辆之间的跟车行为[19]。该模型基于车辆之间的相对速度和间距,以及车辆的加速度和制动能力等因素,来模拟车辆的跟车行为。这种模型在自动驾驶领域和交通流控制中应用广泛[20]。采用改进模拟退火法[21]对IDM模型进行标定,模型参数如表6所示。
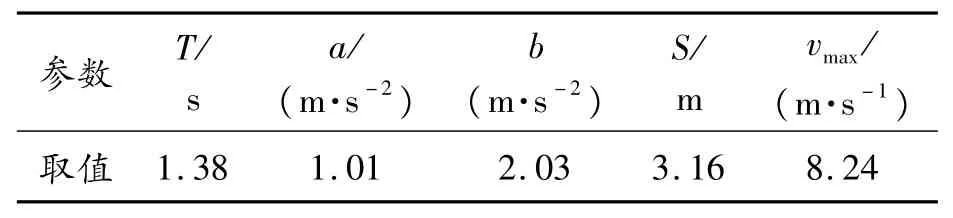
表6 IDM模型参数标定结果
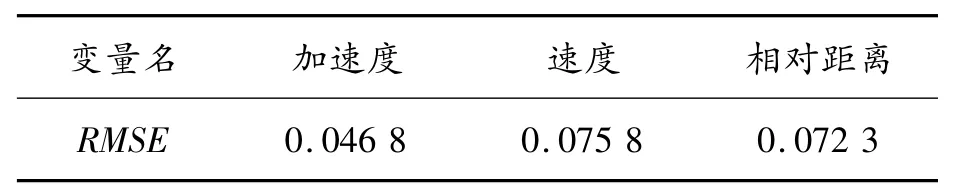
表7 IDM模型仿真效果
在前车的运动状态给定的条件下,首先对跟驰对中后车的速度、位移进行初始化,接下来通过模型的循环迭代求解得到每一时刻模型的输入值。跟驰模型的仿真结果如图6—图8所示。

图6 IDM纵向加速度仿真效果

图7 IDM车头间距预测效果
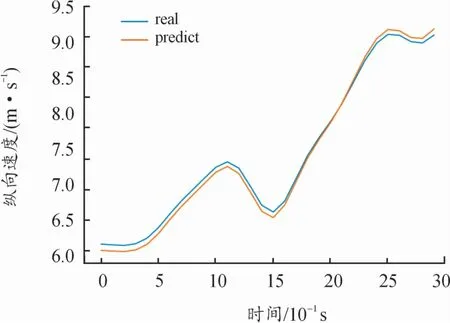
图8 IDM纵向速度仿真效果
从仿真效果图可以看出,在换道前特殊跟驰阶段,传统IDM跟驰模型并不能够准确反应变道车辆在此阶段的运动特性,预测存在较大偏差,精确性大为降低。表6为IDM 模型测试的仿真效果。
将搭建的CNN-LSTM组合模型预测效果与传统IDM跟驰模型进行对比分析,发现所搭建组合模型能更好地对换道前跟驰做出预测效果。从各项预测性能上可以看出,CNN-LSTM 模型的精度明显优于传统IDM模型,其中加速度精度提高约15.1%,速度精度提高约47.9%,相对距离精度提高约11.7%。
5 结论
基于NGSIM数据集跟驰车队的轨迹信息,划分了换道车辆跟驰至换道结束的运动阶段。搭建了CNN-LSTM网络模型以适应于换道前的特殊跟驰阶段。经过仿真验证,提出的CNN-LSTM模型在加速度、速度、相对距离、纵向位移指标上精度较传统IDM模型均有提升。主要结论如下:
1)在对换道车辆跟驰轨迹的研究中,发现换道前跟驰阶段的状态与一般跟驰状态存在较大差异,提出车辆“换道前跟驰”概念,以车辆换道前斜率的第五八分位数作为基准点划分出“换道前跟驰阶段”,并首次用z检验法验证了该阶段车辆跟驰行为的特殊性。
2)通过组合搭建CNN-LSTM网络,在常规输入中所得模型加速度精度较传统IDM模型提高约15.1%,更适用于换道车辆“换道前跟驰”特殊阶段。
3)组合模型的精度主要受超参数、层结构等因素影响。
4)在预测车辆换道前的跟驰行为时,未考虑邻车数据的影响。未来的研究会集成邻车数据,将邻车位置、速度以及加速度等信息融入模型,更好地识别潜在的冲突情况,进一步提高模型的准确性和可靠性。
猜你喜欢
当代水产(2022年6期)2022-06-29
北京航空航天大学学报(2021年9期)2021-11-02
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电子制作(2019年11期)2019-07-04
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
现代装饰(2018年5期)2018-05-26
北京航空航天大学学报(2018年1期)2018-04-20
