基于幅值跟踪法的自动增益控制系统设计
2024-03-19 08:14:50武永华董建怀
电子制作 2024年4期
武永华,董建怀
(福建江夏学院 电子信息科学学院,福建福州,350108)
在通信等系统中,由于通信环境或元器件参数等原因,前级输入信号的幅度可能大小不一、变化范围大。如果本级放大器采用固定增益,则当输入信号大时会造成后级信道饱和或阻塞,甚至损坏设备,如果输入信号小时则有可能导致信号的丢失[1]。为了保证信号的有效传输和利用,需要一种能实时地根据输入信号大小自动地调整放大器增益从而使信号幅值保持稳定的电子系统[2]。这种电子系统除了应用于通信系统外,在测量、自动化等领域也有着广泛的应用[3~5]。目前,实现信号自动增益控制主要有两种方法,一种是利用电子元器件的非线性特性设计的自动增益控制电路,另一种是采用软硬件相结合方法设计的自动增益控制系统。自动增益控制电路虽然成本较低,但其输出信号的幅值一般是固定的、无法改变[6~8],现有的自动增益控制系统大多存在成本高、控制精度低等问题[9],基于此,本文设计一种基于幅值跟踪电路的实用的自动增益控制系统。
1 系统总体设计
系统的结构框图如图1 所示,其主要由单片机、增益可控放大器、幅值跟踪电路、按键和LCD 组成。增益可控放大器是一个由运放和反馈电阻等构成的放大电路,其中的反馈电阻由阻值受单片机控制的数字电位器承担。幅值跟踪电路负责将放大后信号的幅值转换成电平信号,单片机通过对该电平信号进行A/D 转换即可获得放大后信号的幅值。输出信号的期望幅值可通过按键设置或更改,LCD 用来实时显示当前信号幅度的设置值和实际值。
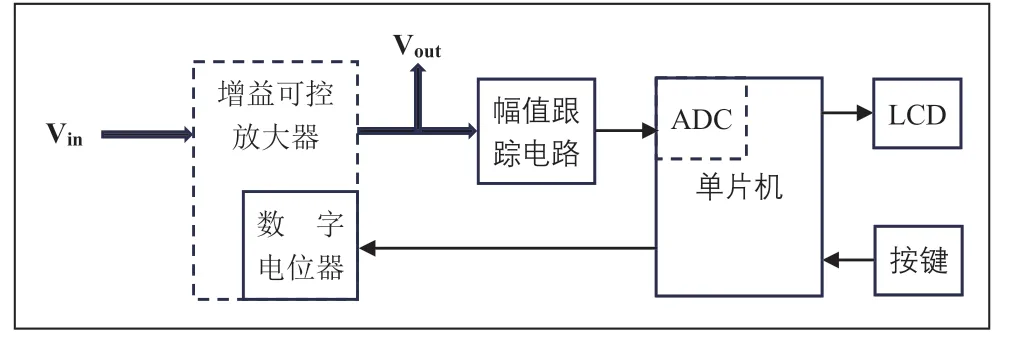
图1 自动增益控制系统结构图
工作中,系统将实际幅值与预置幅值实时地相比较,若实际幅值大于预置幅值则单片机发出相应的控制信号来减少放大器中反馈电阻的阻值即减少增益,反之单片机则使反馈电阻增大即增大增益,从而实现放大器增益的自动控制。由于系统对放大器增益的控制是闭环的,所以在输入信号幅度发生变化时能确保输出信号的实际幅值与预置幅值相等。
2 硬件设计
■2.1 增益可控放大器
增益可控放大器的电原理图如图2 所示,它由两级放大电路和一个电压跟随器组成。第一级是由增益带宽积(GBW)为10MHz 的运放NE5532(U1A)和数字电位器X9C103[10](U2)构成的增益可控的反相放大电路,第二级是由U1B和R2、R3 构成的放大倍数为1 的反相放大电路,后者的作用是确保输出信号与输入信号相位相同。由U3A 构成的电压跟随器主要是用来隔离后续的负载及幅值跟踪电路对放大器的影响。
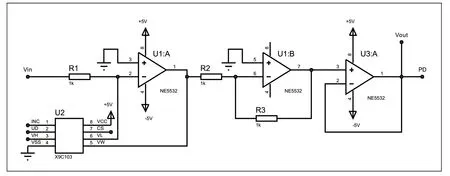
图2 可变增益放大器电原理图
第一级放大电路中的反馈电阻Rf由X9C103 的VL和VW引脚间所呈现的电阻实现。数字电位器的内部结构图如图3 所示,VL和VH引脚间的阻值为10k,它是由99 个阻值相同(约101)的电阻串联而成的。VW相当于电位器的滑动端,引脚VW与VL间所呈现的电阻大小是由引脚和的电平决定的,X9C103 具体的工作模式选择如表1 所示。

表1 X9C103工作模式选择
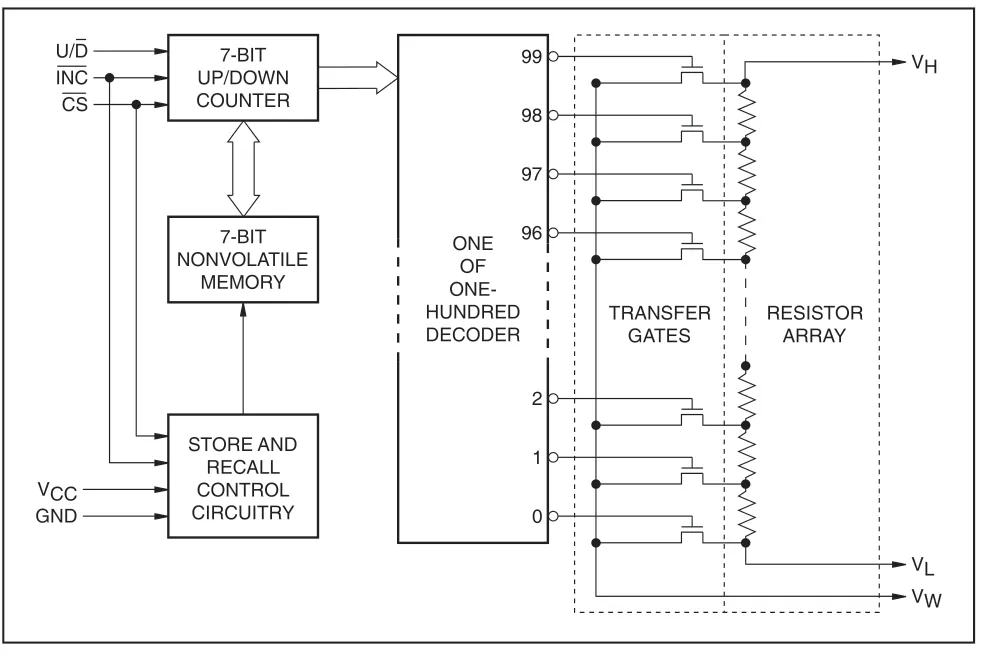
图3 X9C103 内部结构图
电压跟随器的输出分两路,一路是系统的输出信号Vout,另一路输入到幅值跟踪电路。
■2.2 幅值跟踪电路
幅值跟踪电路的作用是将输入信号的幅值实时地以电平大小的形式反映出来,这样,单片机只要检测该电平的大小就可获取当前输入信号的幅值。幅值跟踪电路原理图如图4 所示,该电路由漏极开路比较器TLC372、积分电路、无源低通滤波器以及电压跟随器等构成,其中积分电路由运放LM358、R4、C1 和R5 组成;无源低通滤波器由R6、C2构成,截止频率为,其用来滤除积分器输出信号中的开关噪声和纹波。低通滤波器输出的信号经由LM358 构成的电压跟随器隔离后输入到单片机内的A/D 转换器进行模数转换。
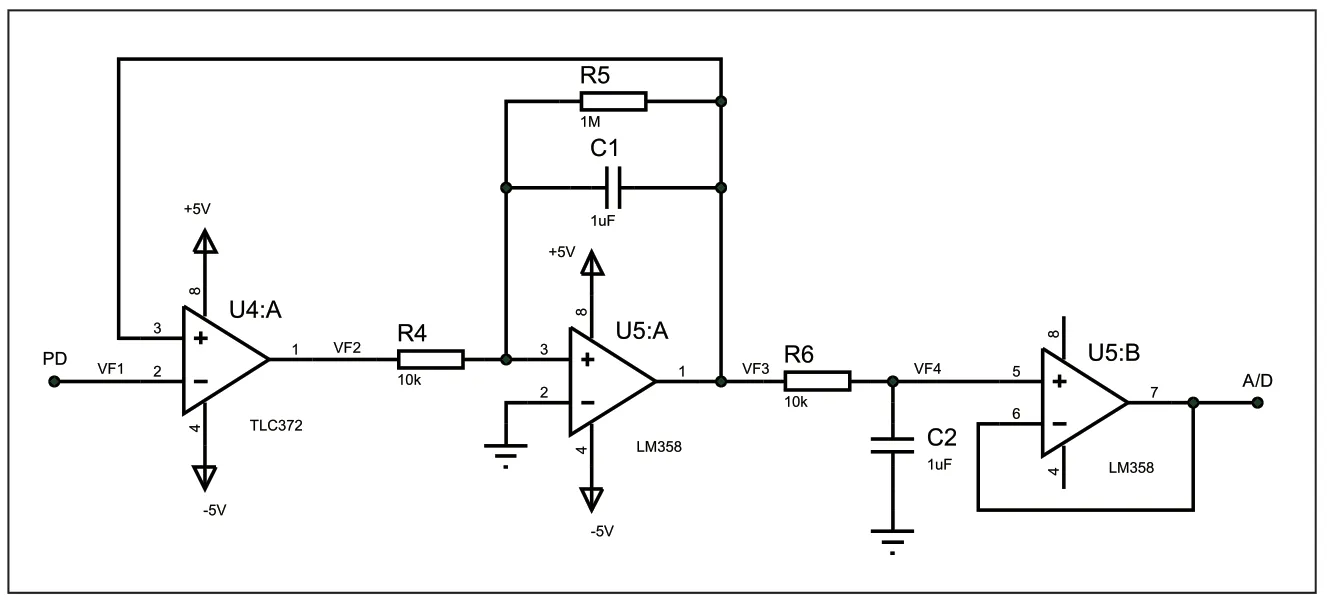
图4 幅值跟踪电路原理图
图5、图6 是输入信号频率为10kHz、幅值为3.5V 时的幅值跟踪电路不同时段的工作时序图。从图5 可以看出,当VF1大于VF3时,VF2为-5V,此时电容C1 通过R4 充电,VF3 的电位升高;当VF1 小于VF3 时,由于TCL372 的输出级(漏级)是开路的且LM358 输入阻抗很大,所以电容C1 只能通过R5 放电,由于R5 的阻值较大,所以R5 放电缓慢,此时VF3 的电位基本保持不变。这样,经过多个信号周期后VF3 的电平就接近输入信号的幅值。从图5 还可以看出,当VF3 越接近输入信号幅值时,VF2 为-5V 的时间就越短,即电容C1 充电的时间就越短。
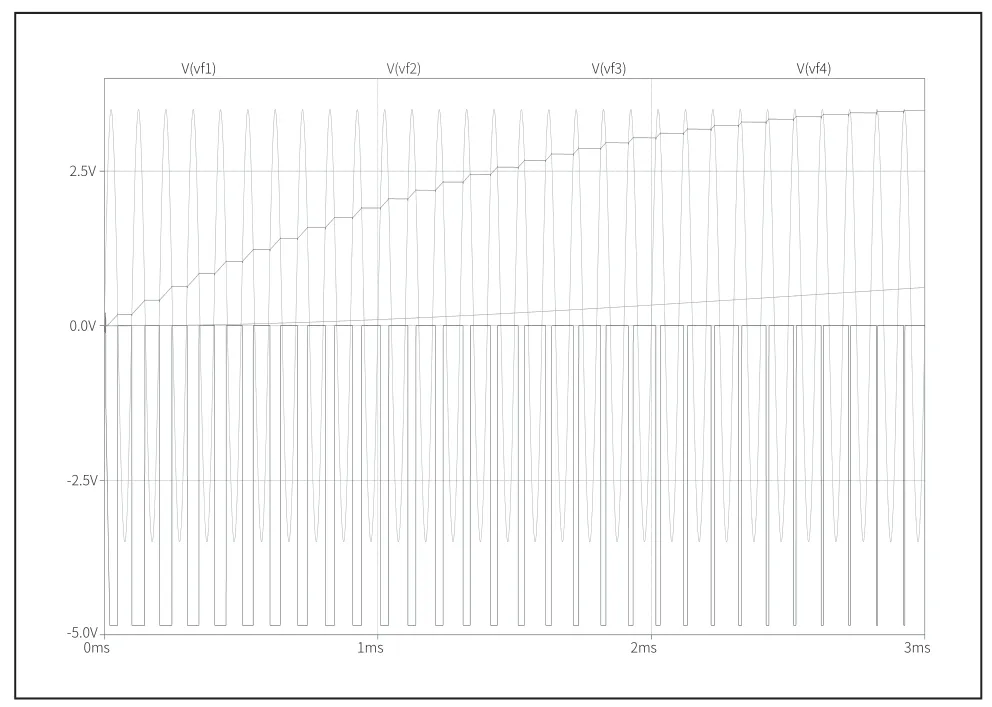
图5 0ms~3ms 间工作时序图
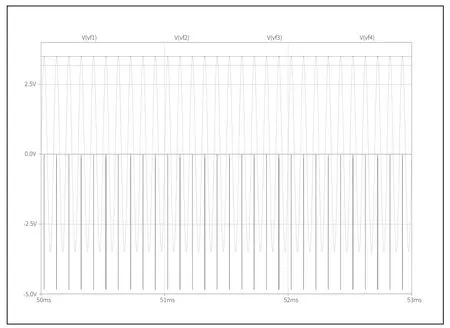
图6 50ms~53ms 间工作时序图
从图6 可以看出,经过一段时间后VF3 和VF4 都等于VF1,即峰值检测电路的输出电平等于当前输入信号的幅值。另外,此时VF2 为-5V 的时间相当短,这段短时间的充电是为了弥补电容放电所造成的电平降低,使峰值电路输出的电平动态地与当前信号的幅值保持相等。
需要提出的是,图5 是幅值跟踪电路刚启动(即输入幅值从0 跳变到3.5V)时的工作情况,由于实际输入信号幅值一般不会发生大的跳变,所以该电路能在较短的时间内使输出的电平等于输入信号的幅值。同理,当输入信号的幅值降低时,电容C1 通过R5 放电,使输出的电平接近于信号幅值。
3 软件设计
设计中,单片机采用片内含有10 位ADC 的ATMEGA16单片机,系统控制流程图如图7 所示。数字电位器X9C103刚上电时VW与VL间的电阻为0,为了使初始时其滑动端VW尽快达到指定位置,初始化时将其置于中间位置。程序中,预置幅值 Vpre是通过调用按键子程序实现的,当前输出信号幅值 Vout是通过对幅值跟踪电路的输出电平进行A/D 转换得到的,增大阻值和减小阻值分别通过调用相应的子程序实现。
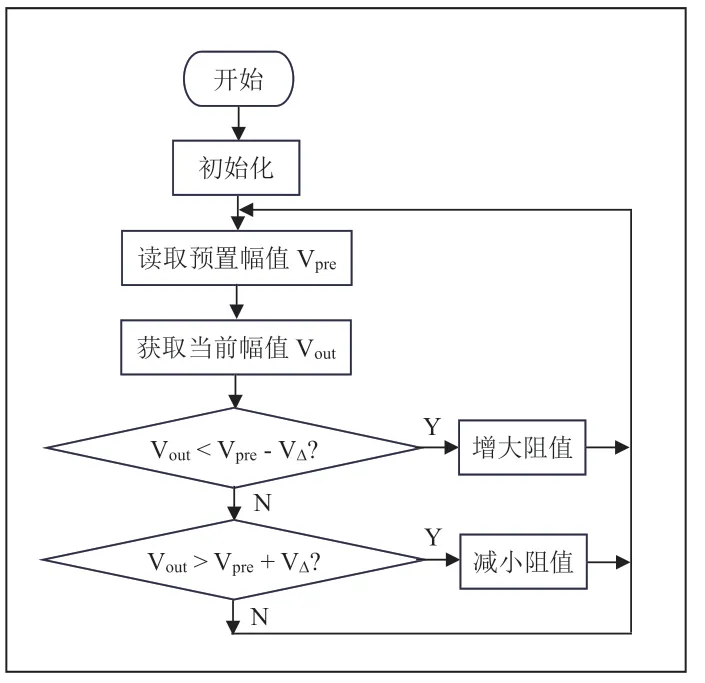
图7 系统控制流程图
由于数字电位器X9C103 的输出电阻(即VW与VL间电阻)是不连续的,是由99 个约101电阻串联而成的,所以程序运行时滑动端VW可能在前后两个位置间不断跳跃。这种增益的反复跳变不仅会使输出信号不稳定,还会使输出信号中叠加上相应的高频噪声,为了解决这一问题,设计中引入一个阈值VΔ,且采用如下的控制策略:当输出信号的幅值Vout在Vpre-V与Vpre+V之间时放大器增益保持不变,从而确保输出波形的稳定。应用中可根据需要选择合适的阈值VΔ。
4 性能测试
测试中,所用的信号发生器型号为UTG7025B,示波器型号为DSO-X-2002A。输入信号频率为1kHz 和10kHz时的测试结果分别如表2、表3 所示,表中响应时间指的是输入信号发生变化开始到信号输出稳定时所经过的时间,输出误差指的是实际输出幅值与预置幅值间的相对误差即。从这两个表可以看出,频率和幅度变化时,系统输出信号的幅值总是近似等于预置值,输出误差小于1.5%,响应时间小于0.1s,这说明系统可以根据输入信号的大小快速地自动调整放大器的增益,使输出幅值与预置幅值基本相同。
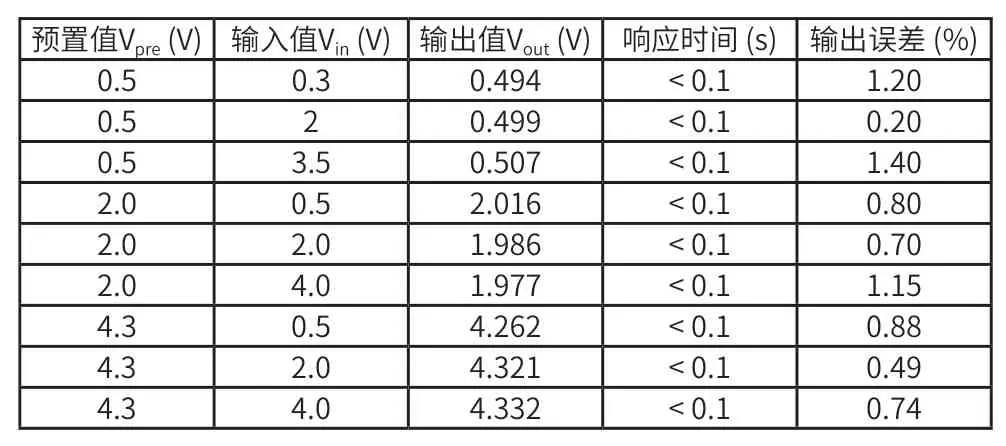
表2 信号频率为1kHz时的测试结果
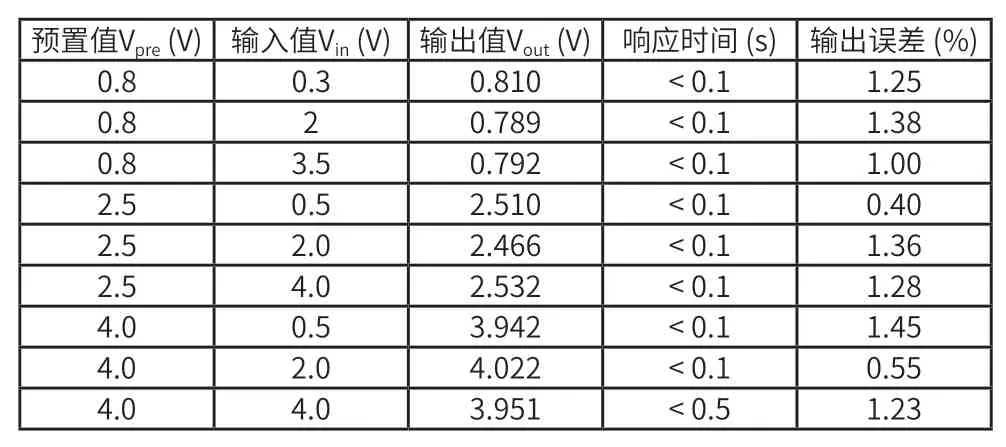
表3 信号频率为10kHz时的测试结果
5 结语
本文设计了一种基于幅值跟踪电路的实用的自动增益控制系统,在输入信号幅值变化时系统输出信号的幅值都能与预置的幅值基本相同,实现了放大器增益的自动控制。该设计具有智能化高、输出信号稳定,收敛速度快、成本低、性能可靠等特点,可广泛应用于相关的电子领域中。设计通频带更宽的幅值跟踪电路并采用宽带可控增益放大器可进一步拓展系统的适用范围,是类似系统设计的一个方向。
猜你喜欢
山西电子技术(2022年2期)2022-04-22 06:45:28
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:06
仪器仪表用户(2020年1期)2020-01-06 08:27:36
印制电路信息(2019年3期)2019-03-14 01:28:48
电子测试(2018年22期)2018-12-19 05:12:56
中学生数理化·教与学(2018年10期)2018-12-06 06:21:30
中国信息技术教育(2016年23期)2017-01-03 22:24:15
焊接(2016年8期)2016-02-27 13:05:12
郑州大学学报(医学版)(2015年2期)2015-02-27 14:50:56
机械工程师(2014年4期)2014-07-01 23:36:27