基于车载三维激光扫描的城市道路竣工测量探讨
2024-03-17 16:23贾峻峰
科技资讯 2024年2期
贾峻峰


摘要:车载三维激光扫描系统融合了多种传感器和数据源,可以自动、迅速地获取道路的全方位信息。其扫描速度迅捷、数据信息丰富、精确度高,采集过程安全简单,并能节省人力。此技术显著提高了外业生产效率,并降低了生产成本。文章详细介绍了车载三维激光扫描技术在道路工程竣工测量中的内外业处理流程。研究结果表明,该技术的精度可达到1:500测图精度要求,满足城市高架路竣工规划测绘的精度需求。该技术方案是切实可行的,且能高效地提高生产效率。
关键词:车载三维激光测量 道路竣工测量 点云数据精度
中图分类号:U415
Exploration of Urban Road Completion Survey Based on Vehicle-Mounted 3D Laser Scanning
JIA Junfeng
(Guangzhou Research Institute of Urban Planning, Survey and Design, Guangzhou, Guangdong Province, 510060 China)
Abstract: The vehicle-mounted 3D laser scanning system integrates multiple sensors and data sources, and it can automatically and quickly obtain comprehensive information of the road. It has fast scanning speed, rich data information and high accuracy, and the collection process is safe and simple and can save manpower. This technology significantly improves field production efficiency and reduces production costs. The article provides a detailed introduction of the internal and external processing flow of vehicle-mounted 3D laser scanning technology in the completion measurement of road engineering. Rresearch results indicate that the accuracy of this technology can reach 1:500 mapping accuracy requirements, and meet the accuracy requirements of urban elevated road completion planning and surveying. This technical solution is feasible, and it can efficiently improve production efficiency.
Key Words: Vehicle-mounted 3D laser measurement; Road completion measurement; Point cloud data; Accuracy(請确认)
1三维激光扫描技术工作原理
三维激光扫描仪系统主要集成三维激光扫描仪、惯性仪、全景相机、测速仪、卫星定位模块和车辆刚性平台装配控制模块[1]。随着车辆的移动,三维激光扫描仪能够快速捕获和分析高精度位置数据、高密度三维点云数据和高分辨率全景图像,实现空间地理信息的自动存取和数据库创建。
3D激光扫描系统由车辆、3D激光扫描仪和数据处理软件构成。该系统广泛应用于我国基础地图绘制、道路导航制图、矿山测量、三维数字城市建设等项目。在系统运行过程中,定位装置和全球导航卫星系统接收机可以检测和分析车辆的位置。使用全景相机和激光扫描头收集三维点云和全景图像,将其视为具有绝对位置坐标的彩色点云。
2 道路工程测量中三维激光扫描技术作业流程
在实际应用中,车载三维激光扫描技术主要包括三项工作内容,一是测量准备,二是数据采集,三是数据处理[3]。在道路工程勘测项目中,车载三维激光扫描技术完整作业流程图如图1所示。
2.1 测量准备
在道路工程中应用车载三维激光扫描技术进行道路竣工测量前,要做好准备工作,其中包括两项内容:一为合理选择基站位置,二为科学规划测量路线。
2.1.1 确定基站位置
总体来说,三维激光扫描的面积非常大,但与道路工程的建设区域相比却非常有限。另外,三维激光扫描仪与被分析物体的角度对空间测定结果的分辨率产生一定的影响。此外,道路建设在室外进行,其测量属于室外工程。植被、地形条件、水文条件等各不相同。道路周围有激光无法通过的障碍物,因此很难覆盖整个道路工程[4]。这就需要在道路勘探过程中合理选择基站的位置。在确定测量基站的位置时,必须在道路施工中寻找宽阔的视野区域,以免附近有障碍物妨碍测量基站的设置。
2.1.2 确定测量路线
公路建设的特点往往是范围大和距离长。为确保检测结果的准确性,必须科学规划检测方法。测量路径的定义对测量结果及其处理有一定的影响。在确定实地勘查路线时,要了解实地勘查区域的具体交通状况,了解实地勘查路线的方向,找到合适的时间规划实地勘查路线。
2.2数据外业采集
进行城市道路车载移动扫描作业前,首先搜集作业周边区域的地形图资料及交通情况,对作业合理规划。本实验任务利用广州市卫星定位连续运行基准站网(CORS)信号,为增强信号强度,另在测区附近架设临时基准站[5]。
在扫描车辆进入测量区域之前,首先进行数分钟的静态观测,以初始化POS系统,并进行车辆绕行“8”字、加速和减速等动作,以完成IMU与GNSS的校准。在进行数据采集时,装载测量设备的车辆应尽量以匀速行驶,避免长时间停车,避免与大型车辆并行。车辆应尽量行驶在道路中心,远离作业区域两旁的高大树木和建筑物。在行驶过程中,严禁倒车。完成数据采集后,需要再次前往开阔地带,停车数分钟进行GNSS静态测量以确保POS数据的精度。同时,根据作业过程中的GNSS信号强度,判断是否需要再次绕行“8”字。
2.3 数据处理
2.3.1车载移动扫描数据预处理
现场扫描数据收集完成后,应及时分析POS轨迹数据。这些解决方案包括全球导航卫星系统的卫星数据和IMU惯性导航数据。惯性搜索引擎IE(Inertial Explorer)软件可用于确定车辆激光扫描系统的位置信息的位置和轨迹。轨迹计算完成后,由自动数据处理软件完全自动处理,生成点云图像和数据,并着色点云数据。如点云坐标系统与所需线划图成果坐标系统不一致,可通过infinity软件通过点位校正的方式进行影像及点云数据的坐标转换[6]。
2.3.2 DLG线划图的生产及编辑
Southern Digital Inc.开发的IDATA提供了用于对点群进行分类、提取特征点和线的3D地图软件。根据国家规定,提取的点、线和表面指定特定的代码、样式、图层以及位置和属性信息。通过提取特征点、线和表面,软件可以轻松捕捉和注记高程值。从特征收集位置信息时,可以通过结合图像数据输入特征属性信息进行编辑。创建线性DLG图并执行检查后,可以将创建的DLG图导出为CAD格式,并将其在CASS中展示。
3工程案例
广州市某道路改造提升工程总体呈东西走向,路线全长8.14km(其中桩号K2+150~K2+380以及樁号K3+140~K4+620为现状桥梁段),道路宽60m,双向六车道,为城市主干道。
通过结合道路竣工测量工程实践,实现了车载三维激光扫描技术在道路工程竣工测量中的应用,提出采用标靶点进行点云数据纠正,提高成果精度,利用传统测量方法验证车载三维激光扫描测量的成果精度,技术流程图如图2所示。
本项目的车载激光三维扫描系统以汽车为移动载体,集成安装了高精度定姿定位系统、3000万像素六镜头Ladybug5全景相机、RieglVUX-1UAV激光扫描头、GNSS接收机及同步控制单元。
3.1 点云纠正处理
按一般流程进行点云预处理,平面、高程精度可达5~10cm,局部区域存在10cm以上偏差,成果精度略有不足。采用标靶点对扫描点云进行纠正处理,以改进车载激光扫描系统的成果精度。
通过强度显示判别标靶点圆心位置。导入标靶点实测坐标,选取点云中校正标靶点的同名点,对轨迹数据进行平差改正,将轨迹数据纠正,完成后重新进行点云融合处理生成纠正后的点云数据。部分数据如图3所示。
3.2 数据检查
需要检查的数据如下。
(1)点云密度及完整度检查。对扫描点云的密度进行检查,点云呈线性,线间距为1~3cm。点云无缺漏,能完整包含两幅道路信息。
(2)点云重叠度检查。在无中央隔离带的左右幅通视路段,扫描时有重叠,两次扫描的精度差在2cm左右;点云数据能较好地套合在同一水平线,高程离散度较小。
3.3 数据生产
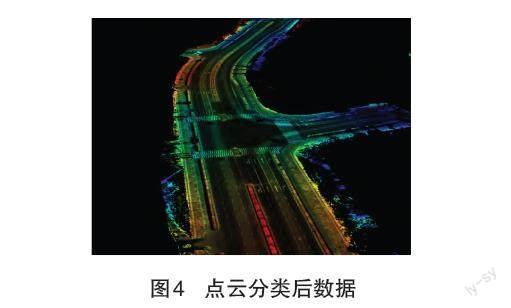
利用校正后的点云进行点云分类(如图4所示),道路特征线提取及纵横断面提取。
4 成果精度分析
为了验证车载移动测量技术所生产的城市高架路竣工规划测绘成果的精度,采用了徕卡TS06ultra-2全站仪进行外业数据采集,并对点云和DLG线划图对应同名特征点进行精度检核。
在该任务的外业数据检测中,共采集了各类平面有效检测点26个和各类高程有效检测点50个。其中,检测点X坐标的最大较差值为7.2cm,最小值为0.1cm;Y坐标的最大较差值为5.9cm,最小值为0.0cm。平面位置坐标的最大较差值为8.29cm,最小值为0.1cm;高程的最大较差值为3.3cm,最小值为0.1cm。经过计算,本实验任务中X坐标检测的中误差为2.18cm,Y坐标检测的中误差为1.79cm,平面位置检测的中误差为2.82cm,高程检测的中误差为1.09cm。这些结果均优于《城市测量规范》(CJJ/T8-2011)中关于平面位置5cm(X、Y坐标分量3.54cm)和高程4cm允许中误差的要求。
通过以上数据,可以得出结论:车载移动测量技术在城市高架路竣工规划测绘中具有较高的精度,该技术方案是可行且高效的。同时,我们也可以看出,该技术的应用能够大大提高外业生产效率,有效降低生产成本,为城市规划和管理提供了有力的支持和保障。
5结语
本文采用车载三維激光扫描技术进行道路竣工测量,精度可达到1:500测图精度要求,满足城市高架路竣工规划测绘的精度要求,技术方案是可行且高效的。
参考文献
[1] 施鹏程. 基于车载激光雷达三维扫描技术的路旁资产管理研究[D].北京:清华大学,2021.
[2] 曹兆峰,赵海峰,王胜利等.车载三维激光扫描技术在大比例尺地形图测绘中的应用[J].现代测绘,2022,45(4):62-64.
[3] 王策. 基于车载激光雷达的三维重建研究[D].吉林:东北电力大学,2021.
[4] 郑艳,张殿,杜向锋,等.三维激光扫描技术在地铁隧道断面测量中的应用研究[J].科学技术创新,2023(15):158-162.
[5] 何小飞.车载三维激光扫描技术在铁路限界测量中的应用[J].测绘与空间地理信息,2022,45(8):60-63.
[6] 何金学.车载三维激光扫描在既有铁路提速改造复测中的应用[J].测绘技术装备,2020,22(1):47-50.