基于MEMS陀螺仪的地下管线测绘系统
2024-03-16 02:12刘魁德
城市建设理论研究(电子版) 2024年6期
刘魁德
佛山市测绘地理信息研究院 广东 佛山 528000
在现代都市中,地下管道布局是一项重要的工作,它包括通讯、供水、燃气以及电力等方面,应选用信息化计量方法,建立地下管道计量体系。本项目拟采用惯性控制、遥感等方法,构建基于信息融合的地下管道测绘与管理模式,构建基于信息融合的地下管道测绘模式,为提高我国城市地下管道测绘水平提供技术支撑[1]。对管道进行红外线和 CT的扫描测量,并通过单击传送的方式进行操作,实现了对管道的实时监控,建立了一套适用于城市地下管道测量的电力传感系统,并对其进行了分析。项目将 MEMS陀螺技术引入到城市地下管线测量中,利用 MEMS陀螺对三轴加速度和三轴角速度进行测量,并利用测量结果进行解算,达到地下管线测绘目的。
1 MEMS陀螺仪
不同于传统机械陀螺仪,MEMS陀螺仪是基于科里奥效应的一种惯性角速率传感器,其内部无需轴承,无转动部件,采用全固态装置,表现为体积小、智能化、价格低、可靠性高、抗大过载冲击、低功耗以及工作寿命长等特点[2]。本文所用MEMS陀螺仪测绘装置主要分为三部分,即:里程计轮组、测绘装置主体和支撑轮组,所用STM300测量单元为小型惯性测量单元,重量只有50g,陀螺仪测量范围为±400°/s,零偏不稳定性为0.5°/h,分辨率为0.22°/h。为保证轮组连接可靠,拆卸方便,选用螺丝连接的方法,采用轮组替换方法,能适应地下管线的测量要求。MEMS陀螺仪结构如图1所示。
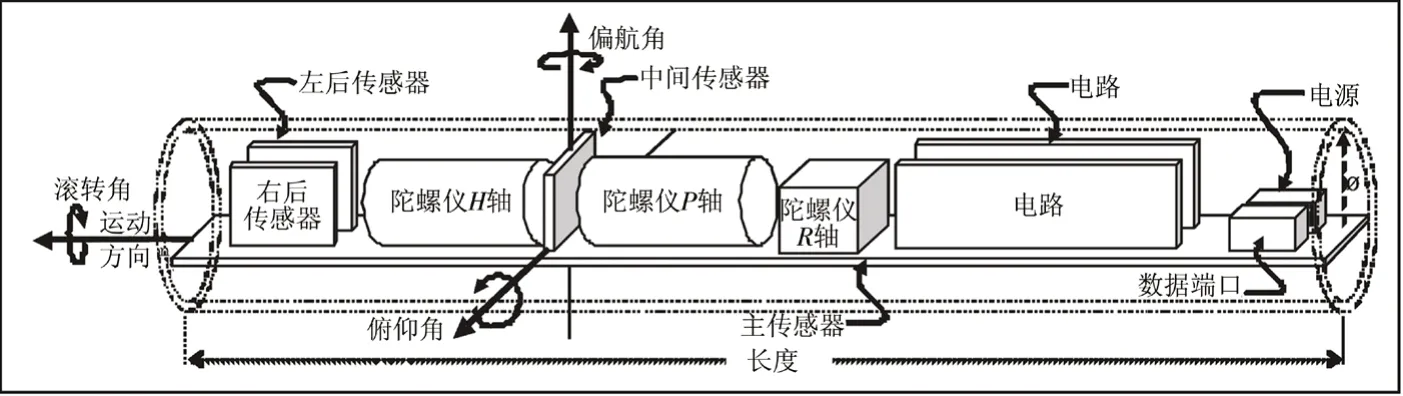
图1 MEMS陀螺仪结构
2 基于MEMS陀螺仪的系统结构
地下管线测绘系统应用MEMS陀螺仪实现相关数据的采集,再通过管道测绘处理所采集数据,以测量管道轨迹。
2.1 主体结构
采用模块化的方式,通过简化组装过程,保证了设备的维修方便。采用机械连接部位的密封和防水处理,选用螺丝连接,保证了测量设备的防水能力。该测量设备的本体为60mm,长为435mm,其上有平滑的涂层和抗氧化的涂层。测量设备的一头是控制面板,上面安装着数据接口、开关和工作指示灯,而在另外一头,是可以替换的电池箱,MEMS陀螺安装有两个12 V的锂电池。
2.2 轮组结构
地下管线测绘的轮组包括螺纹轴、支撑杆、滚轮、U型支架、限位螺母和轴承等组合而成,两个密封的轴承一起支承着滚轮,保证了滚轮的平稳运行。通过调节限制螺帽,可在较小的幅度内调节车轮组的直径,使之适用于各种口径。另外,该里程表组件还组装了一个连接本体的里程表数据传送界面,该结构防水性能较高[3]。
3 地下管线测绘系统的设计实现
3.1 系统的软硬件设计
首先初始化数据采集模块、数据读取模块、数据存储模块以及开关模块,在MEMS陀螺仪发送数据过程中,将采集模块启动,向FIFO队列存储所采集数据,在FIFO队列数据超量时,需要发送数据至SD卡内,持续循环以上操作,持续向SD卡传输数据,直至设备电源关闭。
首先,数据采集模块。采集数据包含里程计数据、MEMS陀螺仪数据,后者通过422电平形式向外发送,所用波特率为921600bps,将电平转换电路设于STM32端,转换422电平为TTL电平,借助STM32串口实现数据的接收。采用串行闲置中断与内存访问(英文缩写为 DMA)来完成对数据的收集,这里的串行闲置中断是指在收到的数据之后出现了一个闲置的帧,这时候STM32将会对是否有闲置的帧进行判定;在对高速率的数据进行收集的过程中,这种方法的效率很高,可以保证数据的实时获取。但是,由于单次获取的资料比较多,导致 CPU被占用,这时将传送到 SD卡内的资料就会被扰乱;因此,使用串行 DMA方式来进行数据的接收,可以很好的防止对内存的影响。由于里程数是以脉冲方式被记录的,所以当STM32发现 GPIO端口是上升缘跳跃时,STM32就会引发一个外部的中断,并且在该中断过程中,会不断地累积脉冲数量;每个脉冲脉冲都与车轮的1/4圆的圆周有关,从而获得了相应的英里数。
其次是资料储存部分。利用STM32完成 DMA和串行通信,串行接口从 MEMS陀螺中获取的信息通过 DMA传输到总线,直到收到全部的数据为止,这时串行闲置的终端将被激活,并将全部的数据存入 BUF。从STM32上获取英里数数据,持续累计所触发脉冲数。融合两个传感器所采集数据,并在FIFO内部存储,并把FIFO数据传至SD卡内。图2为数据存储流程。
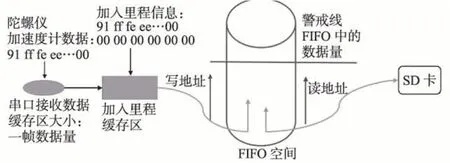
图2 数据存储流程
再次,数据读取模块。本模块的核心部分就是通过 USB接口对 SD卡进行读取。测试结束后,通过 USB接口与PC机相连,实现对 SD卡的实时存取,并对 SD卡的内部信息进行读出。为了降低功率消耗,本设计在测试过程中处于非工作状态,测试结束后由电脑上的 USB电源提供电源,通过PC机对实现对SD卡的存取。
3.2 地下管道测绘算法的实现
在地下管线测绘工程中,MEMS陀螺仪因其价格低、体积小等优势被广泛应用。然而,MEMS陀螺存在测量精度不高、捷联惯性导航(SINS)存在运算误差等问题。针对此问题,一般采用将 SINS与其它辅助导航相结合的方法进行求解。本项目拟采用非完备限制/里程计/MEMS-IMU联合定位方法,通过非完备条件下/里程计/MEMS-IMU联合定位方法求解,提高测量精度。
3.2.1 捷联惯导误差方程
为了研究 SINS的精度,即每一种不同的误差源对 SINS的姿态偏差角度和导航位置的影响,建立相应的误差公式。由 SINS导出,建立了姿态角误差公式:
速度误差方程为:
位置误差方程为:
3.2.2 管道轨迹解算
将惯导坐标的位置、姿态和速度的偏差作为系统的状态量,将惯性定轨的速度与惯性系统的速度转换成载体坐标的速度差作为系统的参数,建立动力学方程,并利用卡尔曼滤波器进行处理;通过对捷联惯性导航的姿态偏差的估计,对其进行了修正。然后,利用正、负两个方向的滤波器,将其运算的结果作为修正信息,实现在副导航信息不足的情况下对端点的修正,利用给定的起止点进行定位校正。利用惯导和非完备约束的联合建模方法,在该方法中加入了传感器的辅助信息,实现起点和终点的校正,重修正过程的终点是正向和逆向的平滑滤波。图3是数据处理流程的示意图。
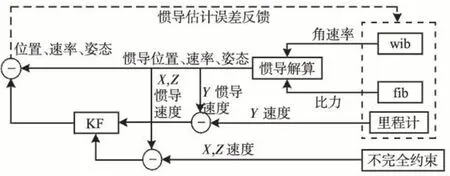
图3 数据处理流程
利用非完备运动约束,利用里程计作为辅助手段,有效压制MEMS-IMU的偏差,提高井下管线联合定位的精度。因此,采用非完备约束/MEMS-IMU/英里计联合定位技术可以实现对地下管线的精确定位。
4 实例应用
以某地下管线探测为例,采用 MEMS陀螺和管道测量仪进行勘探,并对一些轨迹进行了挖掘验证。按照 MEMS陀螺的测试资料进行结构的设计和建造。MEMS陀螺的测绘工作包括前期准备、辅助测绘、定位测绘和数据处理,图4为工作技术流程。
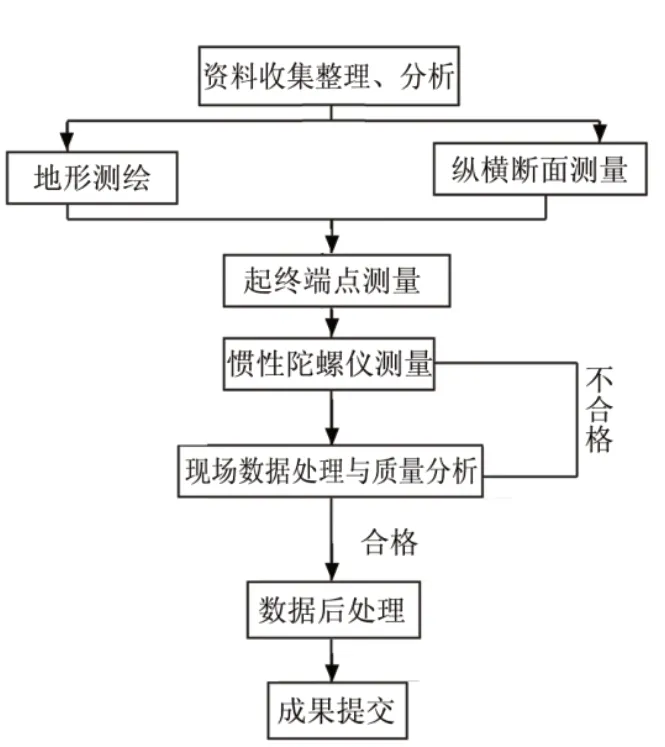
图4 工作技术流程
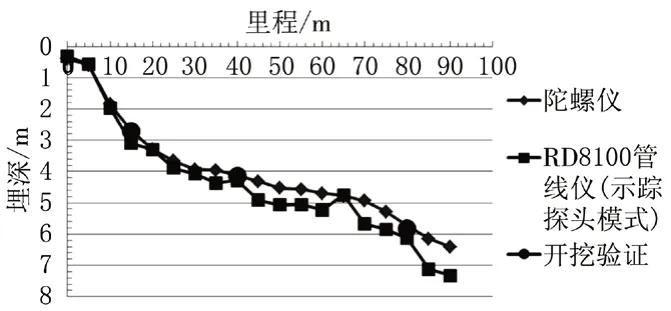
图5 埋深实测比较图
从起点至90m范围,采用 MEMS陀螺和管道探测器进行探测,管道探测器采用追踪探针方式,其发射频率为32.8 KHz,探针直径为64 mm,采用管道探测器跟踪探测器的电磁信息,通过管道探测器接收端的追踪探针,实现对数据的直接读出。在区段内采用两种方法进行了反复勘察,并对3个点位进行了挖掘检验。用平均误差计算的重复检测极限值是:
MEMS陀螺仪之所以比管道探测器(示踪探针)的测绘更精确,是因为其输出的探针(示踪探针)所产生的电磁场极易受到外部环境的干扰,且易发生畸变。在检测时,无需在道路上安装跟踪装置,也就是不会受到环境的干扰。不受电磁干扰,不受磁场干扰,可自主工作,测量任意深度,精度低,适用于各种材料的管路;通过该程序可以实现对管道的方向、深度、材质等的精确测量,从而保证了整个空间的安全稳定运行。
5 结语
基于 MEMS陀螺仪的城市地下管线地图绘制设备,利用有源设备搭载的地图设备,通过在管线中行走来实现对管线的轨道绘制。绘制设备搭载MEMS陀螺仪获取三轴加速度、三轴加速度,霍尔传感器感应测图机构车轮组上的磁体获取行程信息,并通过 SINS修正算法对所获取的信息进行处理,最终完成管线的轨迹检测。为了实现高速度和高实时性,对地图绘制设备进行了硬件设计。在程序上,采用了快速的数据获取方式,使其能够在保存完好的情况下,达到了较高的实时性。采用MEMS-IMU/里程计结合的方法和合成修正方法,有效地消除了单纯惯性导航的偏差,从而改善了管线测量的精度。以上方法的实现,有效地解决了测量仪器在研制过程中遇到的难题,体现了该方法的创新性。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2021年9期)2021-11-02
中国惯性技术学报(2019年1期)2019-05-21
中国自行车(2018年9期)2018-10-13
传感器与微系统(2018年7期)2018-08-29
中国自行车(2018年7期)2018-08-14
中国自行车(2018年7期)2018-08-14
百科探秘·航空航天(2017年9期)2017-12-31
中国自行车(2017年1期)2017-04-16
山东工业技术(2016年15期)2016-12-01