
一种配置矢量调节机构的全电推卫星动力学模型
2024-03-12 12:36:02王玉峰
空间控制技术与应用 2024年1期
耿 洁, 文 闻, 李 巍, 刘 蕊, 王玉峰
北京控制工程研究所,北京 100094
0 引 言
电推进系统具有比冲大、推力小的技术特点,能够有效降低卫星发射质量,提高卫星有效载荷比,延长卫星寿命,逐步成为空间推进系统应用的热点领域[1-5].电推进系统在卫星上的应用经历了循序渐进、由易到难及逐步深入的过程,20世纪90年代起,电推进系统开始应用于航天领域,主要完成静止轨道卫星工作轨道的位置保持,2000年后,经过前期在轨飞行验证,电推进技术延伸至空间探测领域和全电推进平台卫星的研制,电推进系统的应用扩展至轨道转移等任务[6-10].
近年来,电推进技术在轨道转移中崭露头角,全电推进卫星技术得到了越来越多的探索.波音公司的702HP和702MP平台配置2套完全冗余的离子电推进系统,主要用于南北位保,且具有实现变轨、东西位保和动量轮卸载的功能[11].702SP平台是波音公司开发的中小型全电推通信卫星平台,采用全电推进实现变轨和位置保持等任务,取消了双组元化学推进系统,降低了卫星发射质量,卫星发射质量不超过2 000 kg,可采用一箭双星发射.2015年3月2日,美国波音公司研制的2颗全电推进卫星ABS-3A和Eutelsat 115 West B使用猎鹰9火箭采用一箭双星发射,2颗卫星于6个月后交付用户使用.截至2020年1月,已有5颗702SP平台全电推进卫星发射入轨[12-13].LS-1300平台是劳拉空间公司的公用卫星平台,配置了4个俄罗斯的SPT-100推力器,通过2个矢量调节机构安装于卫星的背地板上,2个位于南侧,2个位于北侧,安装角在45°左右.Artemis为欧空局的一颗数据中继卫星,设计寿命10年,其离子推进系统推力器安装与LS-1300类似,分别安装在卫星南北板靠近背地面一侧,推力矢量在YOZ平面内,与Z轴夹角约45°,由于发射失败,卫星没有进入预定轨道,卫星使用化学推进的远地点发动机将卫星提升至31 000 km圆形停泊轨道后,用离子推进系统完成轨道转移任务[14-15].OHB系统公司的SmallGEO是一种多用途的地球静止轨道卫星平台,包含一系列型谱化配置设计,能够广泛适应各类用户需求,Electra平台为基于SmallGEO卫星的首个全电推系列,主要针对10 kW以下的通信卫星需求,允许客户对发射方式(全化推、化/电混合或全电)、载荷质量和GTO转移时间进行定制,有效载荷质量可达900 kg.Electra平台配置4台电推力器,配置在2台可展开的矢量调节机构上,每台矢量调节机构上安装2台电推力器,作为主份和备份[16-18].2023年1月13日,我国第一颗全电推卫星——亚太6E卫星发射升空,并于2023年2月进入电推进转移阶段.截至3月中旬,经过42天的转移轨道电推进变轨,卫星半长轴已提升3 126 km.亚太6E卫星配置2台可展开矢量调节机构,每台机构顶端安装2台电推力器.
图1(a)~(b)给出了目前电推力器的2种安装方式,2颗卫星分别选用2种不同构型的矢量调节机构支撑电推力器以及调节推力器的推力矢量沿设计的指向[19].
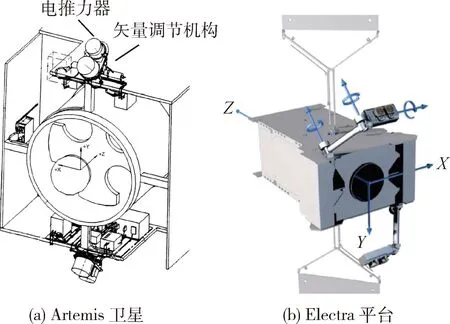
图1 电推进系统布局及安装Fig.1 Layout and installation of electric propulsion system
图1(a)中采用的是传统构型的矢量调节机构,一般由安装底板、推力器支撑板及2个关节组成,能够实现二维方向推力矢量的指向调节,调节范围较小.图1(b)中采用的是可展开式矢量调节机构,由若干关节及臂杆组成,一端固定于卫星,一端安装提供推力的电推力器,能够完成电推力器的空间指向和结构支撑等功能.这种机构推力方向及作用点调节范围大,可适用于不同的轨道阶段及任务,能够完成轨道转移、南北位保、东西位保和飞轮角动量卸载等任务.
本文以配置了可展开矢量调节机构的全电推卫星为研究对象,给出卫星的动力学模型,推导电推力及力矩对全电推卫星姿态及轨道的影响.
1 研究对象及其模型
本文以全电推进卫星为研究对象,其电推力器安装如2图所示.
电推力器安装于一台可展开矢量调节机构上,矢量调节机构可以对电推力的作用方向及作用位置进行较大范围调节,以实现不同的控制任务.例如图2(a)为进行轨道转移时电推力的方向,2个电推力器同时点火,电推力平行于速度方向,推力不过质心;图2(b)为位置保持时的电推力器方向,在一天的不同时段,2个电推力器轮流点火,推力方向过卫星质心.
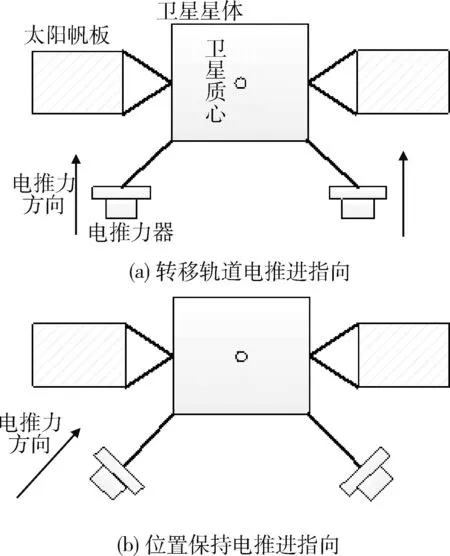
图2 电推进指向Fig.2 Electric propulsion pointing
矢量调节机构安装在卫星-Z面上,每台推力器都能够产生径向、切向和法向3个方向的速度增量.依靠2台电推力器同时对地理经度和纬度进行位置保持控制.双推位保利用2台矢量调节机构上的各一台电推点火,每天南北各点火一次.南侧点火在赤经270°附近,北侧点火在赤经90°附近.选择南北其中一台电推力器,调节其方向垂直轨道面,进行南北位保;另一台推力器推力方向与轨道面有一定夹角,同时进行南北位保和东西位保.图3给出北侧推力器进行向南位保的示意,产生的推力矢量中的南北向分量使得卫星产生向南的加速度,点火过程持续一段时间后,卫星产生向南的速度分量,该速度分量与卫星轨道倾角方向的速度分量合成的最终速度使得轨道倾角下压,卫星在南北方向的漂移得到补偿.南侧推力器点火实现向北和东西位保,推力器工作产生的推力在轨道面内径线方向(法向)分量会造成卫星轨道偏心率漂移,2个推力器对称位置工作,可抵消偏心率漂移影响.整个点火过程中利用矢量调节机构保持点火推力器的推力矢量过整星质心,从而避免给卫星带来额外的姿态扰动.

图3 电推进位置保持示意图Fig.3 Electric propulsion position keeping
本文采用的卫星姿态动力学与运动学方程如下:
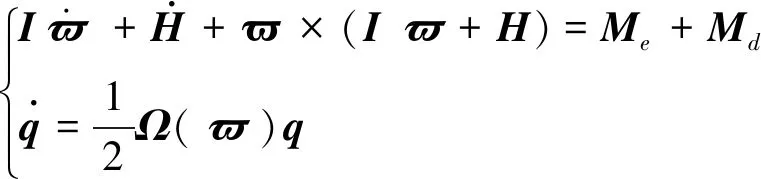
(1)
其中,I为卫星的惯量矩阵,H为动量轮的角动量,ϖ=[ωxωyωz]T为角速度向量,Me为电推力作用在卫星上的力矩,Md为作用在卫星上的干扰力矩,对于全电推进卫星,Me+Md为作用于卫星上的全部外部力矩.
Q=[q1q2q3q4]T为四元数,用四元数进行姿态描述无奇异且效率高.
本文采用经典轨道要素的高斯摄动方程如下:

(2)
式中,μ为地球引力常数,a为轨道半长轴,e为轨道偏心率,i为轨道倾角,Ω为升交点赤经,ω为近地点幅角,θ为真近点角,M为平近点角,p为轨道半通径,h为轨道角动量大小,r为卫星地心距,v为卫星速度大小,A=[frftfh]T是除引力加速度外的其他外力加速度矢量,fr、ft和fh分别为控制加速度在卫星径向、横向(轨道面内垂直地心方向的前进方向)和法向的分量.对于全电推进卫星,外力加速度包含电推力器推力产生的加速度和摄动加速度矢量2部分

(3)
式中,Fe=[FexFeyFez]T为卫星电推力在本体系中的表示,Fd=[FdxFdyFdz]T为卫星本体系内轨道摄动力,Ctb为卫星本体系到轨道RTN坐标系(R轴沿地心到卫星质心的方向,T轴在轨道面内与X轴垂直指向卫星前进方向,N轴根据右手定则决定).
对于电推进卫星来说,电推力是除干扰外的全部作用力,为对全电推卫星的运动特性进行模拟,需要建立电推力及力矩的精确模型,后面给出电推力模型设计方法.
2 电推力及力矩计算模型
本文研究的矢量调节机构采用四关节结构,可以实现三维空间中电推力指向及作用点的调节.矢量调节机构由4个关节驱动轴、根部底板和推力器支撑板及臂杆等组成,在卫星上的布局如图4所示.
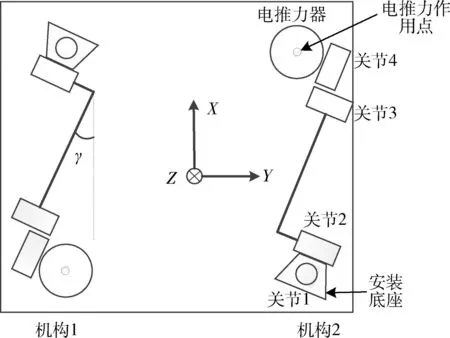
图4 矢量调节机构在卫星上的安装示意图Fig.4 Thruster point assembly mechanism installation on the satellite
图4中所示坐标系为卫星本体坐标系,图中矢量调节机构的状态为未展开的状态,电推力作用点在电推力器上平面的圆心.
每个矢量调节机构的4个关节角分别为β1、β2、β3和β4,压紧状态时,4个关节角度为0°,此时机构状态如图4所示,此时旋变返回的4个关节角为0°.关节坐标系的Z轴和关节轴线重合,关节的旋转极性基于各关节轴线,采用右手螺旋定则进行定义,如图5所示.应用电推力器对卫星进行控制时,各关节转角不同,电推力在卫星三轴的投影及作用点不同,会对卫星的姿态及轨道产生不同的影响,因此需要建立矢量调节机构动力学模型,推导电推力、电推力矩与机构各关节角之间的关系,为设计矢量调节机构控制方法、卫星姿轨控方法以及对控制系统进行验证提供依据.

图5 矢量调节机构模型Fig.5 Model of thruster point assembly mechanism
2个矢量调节机构完全相同,以其中一个为例,建立矢量调节机构的D-H连杆模型,如图5所示.
图5(a)~(b)中坐标系{1}~{4}为基于关节1~4建立的坐标系(坐标系{1}为图中X1Y1Z1组成的坐标系,以此类推).坐标系{e}为电推力坐标系,原点在电推力作用点,与坐标系{4}固连,Ze轴方向为电推力方向的反方向.
采用前置DH参数法获得机构的DH参数,根据表1,可以直接计算出坐标系{i}相对于坐标系{i-1}转换矩阵如下[20]:
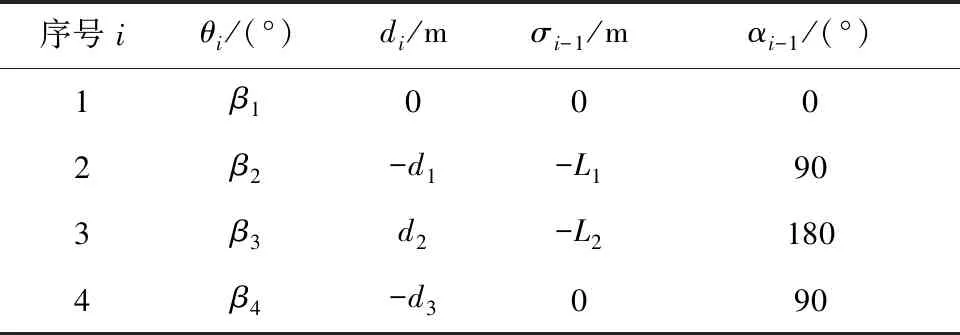
表1 机构D-H模型参数Tab.1 Parameters of D-H model
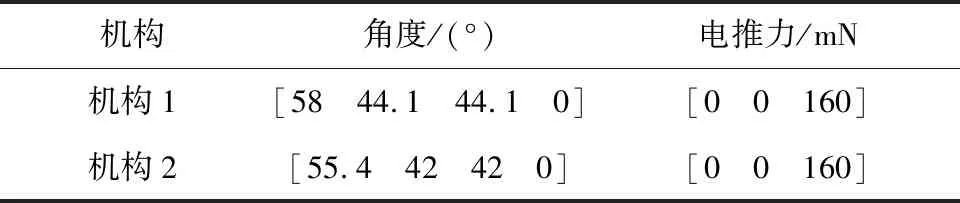
表2 电推力与机构转角对应关系Tab.2 The correspondence between angles and electric thrust

(4)
电推力坐标系{e}原点位于推力器喷口圆心处,定义如图5所示,机构各关节旋转时,该坐标系相对于机械臂末端坐标系{4}的转换关系为固定值
(5)
对于具体的矢量调节机构,表1、式(4)~(5)所示模型中的d1~d4、L1~L3为固定值,可通过直接长度测量得到.关节转角可通过旋转变压器实时测量.
机构基座坐标系{0}原点在卫星本体系的坐标为[xayaza],该坐标系为整星上的固定坐标系,不随机构关节转动而改变,其X轴方向沿着臂杆方向,Z轴方向沿着关节1轴线方向,机构臂杆与卫星X轴的夹角为γ=15°,根据机构基座坐标系和整星坐标系的定义,可以得到机构基座坐标系与整星坐标系的转换矩阵
(6)
电推力坐标系{e}与卫星本体系{sa}之间的转换矩阵如下:
(7)


用P=[PexPeyPez]T表示根据上述方法计算出的电推力方向单位向量,用Le=[Lex,Ley,Lez]表示推力作用点.假设电推力器产生的推力标称值为Fenorm,则单台电推力器产生的电推力大小在本体系中各轴的投影为
Fe(i)=[FexFeyFez]T=Fenorm[PexPeyPez]T
(8)
用Ls=[LsxLsyLsz]表示卫星质心坐标,则电推力矩计算如下:
Me(i)=[MexMeyMez]T=Fe×(Le-Ls)
(9)
对于图4所示的配置有2台矢量调节机构的情况,按上述方法计算出每台电推力器对应力和力矩,相加即可得到作用于卫星上的合力及合力矩
Fe=Fe(1)+Fe(2)
(10)
Me=Me(1)+Me(2)
(11)
根据上述过程,可以得到矢量调节机构角度与电推力、电推力矩的关系.将电推力和力矩代入式(1)~(2)所示的姿态轨道方程,可以对电推力对姿轨控的影响进行模拟.
3 仿真校验
本节应用前述章节建立的姿轨控及电推力模型,对卫星姿轨控过程进行仿真.
以某质量为2 000 kg的全电推通信卫星为例,采用电推进进行转移轨道变轨,选取初始半长轴为17 623 km,倾角为20.82°,偏心率为0.34的轨道,设置每个电推力器标称推力为160 mN.轨道转移时,调整卫星姿态为Z轴朝向卫星前进方向.
根据试验及测量,当图4中2台矢量调节机构分别为[58° 44.1° 44.1° 0°](图4中机构1)、[55.4° 42° 42° 0°](图4中机构2)时,推力器平面的垂线与卫星Z轴平行,即电推力方向应为[0 0 1],由于每台电推力器标称推力为160 mN,电推力应为[0 0 160]mN.
根据第2章的建模方法,得到推力如下表.
可以看出,电推力模型得到的推力方向与实际一致.
对卫星转移轨道控制进行仿真,转移轨道小推力变轨期间,通过调整推力器推力方向,产生三轴控制力矩,实现三轴角动量卸载.
图6~9给出电推力器点火8h,卫星的轨道变化情况及电推力、电推力矩的曲线.可以看出电推进点火期间,轨道半长轴提高,同时倾角减小,与设计的轨控策略一致.电推力不是严格为[0,0,1],是因为控制方案通过矢量调节机构小幅偏转,实现电推力方向调节,产生电推力矩,以实现三轴角动量卸载.
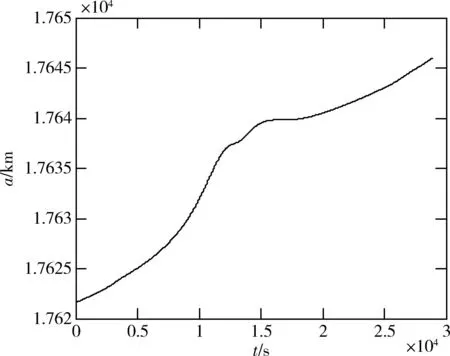
图6 半长轴Fig.6 Semi-major axis

图7 轨道倾角Fig.7 Orbital inclination
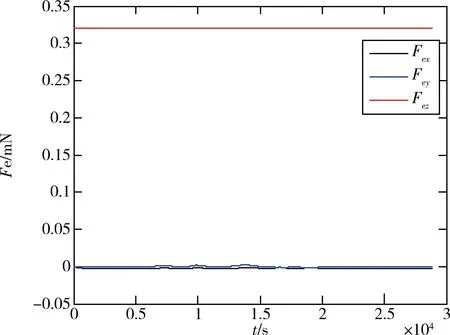
图8 电推力合力Fig.8 Electric thrust resultant force
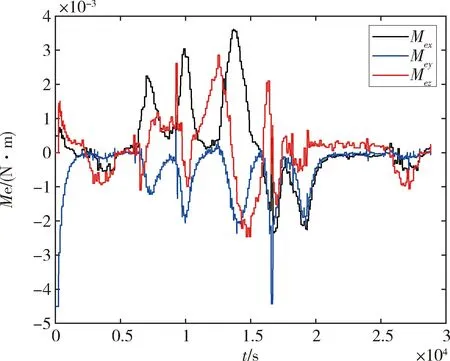
图9 电推力矩Fig.9 Electric propulsion torque
轨道倾角不是完全单调递减的,波动之处是因为考虑了太阳光压、太阳月球引力摄动以及地球非球形摄动的影响.
采用本文方法建立亚太6E卫星的动力学模型,对卫星及其矢量调节机构的实际特性进行模拟,并将该模型应用于亚太6E卫星的控制系统闭环测试中,对星上姿轨控算法、根据目标指向解算关节角算法等进行验证.亚太6E卫星电推进轨道转移过程中,姿轨控特性、矢量调节机构的指向和角度等响应特性与基于本动力学模型的仿真结果一致,验证了模型的正确性.
4 结 论
本文针对一种配置可展开矢量调节机构的全电推卫星开展了动力学模型研究。建立了可展开矢量调节机构的D-H连杆模型,在此基础上推导了可展开矢量调节机构上的电推力器产生的力及力矩模型,以及电推力器及矢量调节机构共同作用下的全电推卫星动力学特性,得到了全电推卫星的精确模型。该模型可准确反映出卫星的运动性能,并已应用于我国亚太6E卫星研制中,测试及在轨结果均表明了模型的准确性及有效性.
猜你喜欢
军民两用技术与产品(2022年10期)2022-11-30 07:13:16
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
军民两用技术与产品(2021年5期)2021-07-28 05:54:50
太空探索(2017年12期)2017-11-30 13:45:33
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
深空探测学报(2015年3期)2015-12-07 11:14:55
电源技术(2015年1期)2015-08-22 11:16:20
太空探索(2015年6期)2015-07-12 12:48:42
太空探索(2015年6期)2015-07-12 12:48:42
