基于PLC自动化控制的绕线机设计与开发
2024-03-08 12:08:14南京工业大学张曦文
电力设备管理 2024年2期
南京工业大学 张曦文
1 系统组成
系统主要由五个部件组成:PLC、HMI(人机界面)、伺服电机、步进电机(两套)。系统硬件组成示意图如图1所示。

图1 系统硬件组成示意
HMI:通过某界面,可以轻松地与操控者进行交互,并且可以根据需求进行参数调整,同时还可以实现设备的实时状态监控。而伺服系统则是通过驱动器与电动机来执行的。
步进系统是一种先进的机械设备,其由两个步进电机和一个驱动器组成,能够实现换槽位和摇摆排线的工艺。
HMI:为人机对话提供了友好的界面,主要用于参数设定和设备实时工况的显示。伺服系统:由伺服驱动器及伺服电机组成,主要完成绕线工作。
步进系统:由两步进电机及其配套驱动器组成,共同完成换槽位(分度)和排线(摇摆)工艺。
2 系统硬件选型及主要电路设计
2.1 硬件选型
为了降低成本,本文选择国内产品作为本控制系统的硬件,并且进行了详细的设计和测试。
第一,采用汇川的H5U CPU 支持EtherCAT总线控制,可以通过FB/FC 功能实现工艺的封装和复用,通过 RS485、CAN、以太网和 EtherCAT接口可以实现多层次网络通信。
第二, 采用汇川近年新推出的AM600,AM600系列PLC 是一款采用模块化结构设计的中型可编程逻辑控制器(以下简称 “AM600”),为用户提供智能自动化解决方案。AM600系列PLC 采用IEC61131-3编程语言体系,支持PLCopen 标准6种编程语言。系统采用机架式布局,每个机架支持本地扩展16个扩展模块,并可通过Profibus-DP、EtherCAT、CANopen 等多种工业现场总线进行机架的远程扩展。AM600本地扩展模块通过内部总线协议进行IO 扩展,支持数字输入/输出模块、模拟输入/输出模块、温度模块等多种功能模块。通过EtherCAT 总线可实现高性能运动控制功能;具有单轴加减速控制功能、电子齿轮功能、电子凸轮功能,还可通过高速IO 实现单轴基本定位功能,且最高频率可达200kHz;同时支持RS485、以太网、USB 等通信功能,满足用户多样化的应用需求。
第三,HMI:采用同辰的7时真彩触摸屏,其不仅价格实惠,而且外观精致,可以与多款主流PLC组态软件兼容,操作简单易懂。
第四,采用固若金的产品,具有卓越的性能和价格优势。在设计时遵循了成本优先、足够使用的原则,而非盲目追求高性能或大品牌。
2.2 系统主要电路设计
系统设计的目的在于实现半导体的绕线生产过程的全面自动化,所以仅对核心元器件进行了简单的电气设计,而对于其他的附属元器件则没有进行过深入的研究。利用三相电动机的协同动力,可实现半定子绕线的全部步骤,其中,伺服电机用于驱动器飞叉,实现绕线动态;步进电机1用于驱动器分度盘,实现换槽动态;步进电机2则用于驱动器半夹具,实现平稳的转动,实现排线动态。经过优化的三个工艺动作中,以绕线为主,需要更加严格的控制,因此,伺服电机被用来控制绕线,以实现最大的转矩,理论可达3000转,而步进电机则被用来控制分度和排线,以降低生产成本[1]。
设计中一个完整的PLC 控制回路,包括启动信号(AN1)、复位信号(AN2)、电机就绪按钮(AN3)、安全保护信号(门开关)以及各个执行机构的原点信号,同时还会输出脉冲控制信号(包括速度、方向、全能等)和安全门驱动气阀,从而实现对整个系统的控制。通过在每个脉冲输出信号端加入电阻,可以有效地限制流量,从而防止驱动器的输入端光耦受到损坏。在设计中,通过三个驱动的电路来提高信息的可靠度。这三个驱动分别代表分度盘、排线和绕线电机。我们采取PUL 和24V 的连接方式,并在PUL 上连接脉冲信号P。当分度盘安装好并被固定时,步进驱动器会发射一个讯号来限制信息的传送,从而确保信息的安全性更可靠[2]。伺服机器必须通过输入可用的电流来运行,因此DI3被安装在CN1的第40针上。
2.3 HMI 功能设计
HMI 可以帮助我们更好地控制设备的运行状态,并且可以根据需求调整绕线所需的参数,包括但不限于:匝数、分度数、槽宽(或者大小)、终止点、延迟时间、飞行速率,以及安装路径的选择。HMI 由同辰公司开发,它采用了HMIFuncDesign组态软件,可以进行模拟,具有很强的功能性。在HMI 初始化之后,可以看到第一个界面,其包含了一些重要设备的名称、操作说明等,以及一个可以进行操作的入口。
3 步进电机的日常维护
确保机械设备可靠地运行,其中最关键的因素莫过于电机。因此,对电机进行定期检查和保养显得尤为必要,但由于缺乏相关技术和经验,当发生故障时,往往需要进行大量费用和时间上的投入,从而影响整个系统的效率和可靠性。如果不重视日常的维护,就会失去电动机的最佳使用效果。因此,维护电动机的重点应该放在维护其清洁度和完整性上,以及定期地检测和维护,以确保其能够正确运转。此外,定期的维护和维护还包括对轴承的定期维护和润滑,以及对进出口的连接点的定期维护[3]。
对于电机而言,由于其需要长期持续地运转,因此,定期维护和保养显得尤为必要。为此,应该特别关注电机所处的工作环境,避免其产生过度摇晃,造成电机故障,缩短其使用寿命。此外,应该定期对其进行外部检测,确认其功能和性能,并且应该定期对其进行维护和维修。
在确保联轴器的安全性、牢固性、稳定性、噪声、红外测温仪测量的温度、钳型电流表测量的电流以及绕线式电机的碳刷、滑环等参数的准确性的前提下,应该尽早对其中的任意部分进行检测,以确保其运转良好,避免发生意想不到的情况[4]。
4 PLC 控制软件系统仿真
MC_POWER 是电机使能指令,这个指令需要输入对应电机的轴名字,AXIS 和指令动作条件,这里设置PLC 允许的时候,指令就直接导致通,可以通过指令的BUSY 和ERR0R 来监控电机是不使能或者故障状态。
MC_JOG 指令是电机的点动指令,首先将指令输入一个轴名字,其次通过控制JOGFORWARD和JOGbackWARD 来分别来控制电机的正转和反转动作。动作速度由VELOCITY 决定,加速度这里设置的都是10000,加速度值越大,代表的是启动的时候速度变化越快。如图2所示。
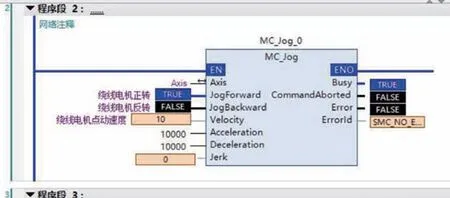
图2 绕线轴点动程序
C_HOME 是电机的回零程序,电机在每次上电后都会丢失当前位置坐标,可以通过该指令来让电机回到设定的原点位置,重新设置当前位置坐标,电机回零完成后,指令的DONE 会导通,关闭电机回零信号。如图3所示。

图3 绕线轴回零程序
可以通过软件自带的TRACE 来监控三个电机的位置,通过监控位置来盘点电机是否运行正确,如图4所示。

图4 电机位置监控曲(蓝色是绕线,绿色是排线,棕色是分布)
通过按下启动按钮和自动按钮,运行显示导通,整个程序通过运行显示代表其是否在自动运行。在自动运行时按下停止按钮或出现故障都会将运行信号关闭。
5 结语
随着PLC 技术发展,目前无论是在硬件还是软件,集成功能都相当强大,而且价格越来越便宜,其灵活多变的扩展功能及稳定的控制令其性价比大大提高,使许多使用单片机控制的设备转向使用PLC 控制,以提高其稳定性及灵活性。PLC 自动化控制的绕线机的系统简明直观,易于掌握,对积极推PLC 技术的应用会有很好的经济效益和社会效益。同时,通过HMI 与PLC 的配合,能为用户提供极友好的操作界面,为生产操作带来便捷,节省时间成本,整个系统经过测试仿真后表明系统已达到设计要求。
猜你喜欢
现代制造技术与装备(2023年8期)2023-11-02 06:16:26
设备管理与维修(2022年21期)2022-12-28 07:34:14
微特电机(2020年11期)2020-12-30 19:42:32
防爆电机(2020年6期)2020-12-14 07:17:04
制造技术与机床(2019年11期)2019-12-04 05:50:36
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
计算机测量与控制(2017年6期)2017-07-01 16:23:59
电子制作(2017年20期)2017-04-26 06:57:36
工业设计(2016年6期)2016-04-17 06:42:53