
基于500kV变电站可视化智能巡检的措施
2024-03-08 12:08国网湖北超高压公司荆门运维分部李佩瑶湖北省超能电力有限责任公司荆门分公司
电力设备管理 2024年2期
国网湖北超高压公司荆门运维分部 李佩瑶 陈 晨 郭 蓉 刘 琪 湖北省超能电力有限责任公司荆门分公司 朱 凡
智能巡检随着用电需求日益提升,变电站建设数量也随之增加,日常巡检作为变电站运维工作中的重要环节,其中可视化智能巡检技术的应用,不仅可以减少相关人员工作量,也能及时发现变电站运行过程中潜在故障,切实提高变电站巡检工作效率和质量。
1 可视化智能巡检技术应用现状分析
变电站智能巡检机器人所处工作环境具有一定未知性,其中智能导航定位功能实现则是可视化智能巡检机器人在500kV 变电站运维工作中有效应用的关键要素,直接关系着运动状态下的智能巡检机器人是否可以按照定位路径完成自主运行[1];因此,若要使智能巡检机器人高效完成巡检任务,前提是其具有的导航系统必须具有良好的性能。智能巡检机器人按照导航进行自主运行时,极易受到外部因素干扰而导致其位置、航向等出现较大偏差。智能巡检机器人位置及航向偏差情况表现如图1所示。
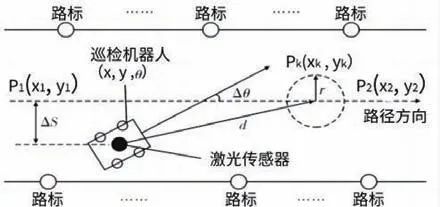
图1 智能巡检机器人位置及航向偏差情况表现
四轮八驱、四轮四驱、四轮两驱是目前智能巡检机器人在实际导航中较为常用的驱动模式。其中以四轮八驱为驱动的智能巡检机器人,是通过驱动电机实现转向,具有转弯灵活性好、轮胎磨损小、转弯半径大的特点;以四轮四驱为驱动的智能巡检机器人,是通过左右轮的速度差实现转向,具有转弯灵活性不足、轮胎磨损大、转弯半径小的特点;以四轮两驱为驱动的智能巡检机器人,是通过左右2个驱动轮速度差实现转向,具有转弯灵活、驱动轮胎磨损大、转弯半径小的特点,但运动稳定性相对较差。
2 基于500kV 变电站可视化智能巡检的应用优化
2.1 指令操作优化
2.1.1 人机互动
基于500kV 变电站运维工作要求,优化可视化智能巡检机器人应用的前提,要对其指令操作进行相应的调整和优化,同时结合实际情况对其视频录制、启动关闭任务、手动巡检及衔接状态等功能进行逐一检查,以保证人机互动操作流程,实现可视化智能巡检机器人自主执行由变电站人工配置的巡检任务。可视化智能巡检机器人状态检查直接关系着相关指令操作的顺利实施,就运维人员而言,必须全面掌握对可视化智能巡检机器人状态连接检查标准。因此,在自主执行巡检任务期间,根据实际情况优化人机互动操作,确保可视化智能巡检机器人顺利完成对500kV 变电站的巡检任务。
2.1.2 查询操作
巡检数据查询:可视化智能巡检机器人在执行500kV 变电站的巡检任务时,通常是通过机器人上所安装的高清摄像头对各类表记数据进行完整且准确地读取,再以拍照的方式对相应数据信息加以反馈。运维人员要根据查询数据内所显示的红色数据,对当前500kV 变电站运行环境是否存在温升越界的情况进行判断,以保证在执行巡检任务期间及时处理所出现的一系列问题。
报表查询:可视化智能巡检机器人在执行500kV 变电站的巡检任务时,运维人员可以通过操作报表查询指令,即可将查询结果在系统界面中显示,使变电站一系列设备的运行数据全面掌握,同时也便于运维人员及时了解可视化智能巡检机器人执行巡检任务的实际情况[2]。机器人后台巡检管理系统可以在执行巡检任务时,通过无线网络基站接收机器人所传送的图像,再运用图像分析算法对接收的图像中的信息进行处理和读取,实现更加准确地判断500kV 变电站运行状态是否存在异常,而运维人员也可以结合自动生成的巡检报告及时开展500kV 变电站运维工作。
2.2 基于双目视觉的巡检路径规划
为更好地解决可视化智能巡检机器人在实际应用过程中由于导航定位丢失而出现的一系列问题,并进一步提高500kV 变电站巡检机器人的智能化水平及实现完全自主运行,应优化可视化智能巡检机器人导航系统的应用性能,以减少各方面因素对其位置及航向的偏差影响,从根本上保证500kV 变电站的巡检任务顺利执行。
2.2.1 巡检地图数据预处理
基于500kV 变电站的双目视觉巡检路径规划,先要预处理基础的规划环境,再初始化巡检地图数据。通过运用Dijkstra 算法对变电站标定的巡检范围进行测定,在此基础上完成最短巡检路径规划。从以往可视化智能巡检机器人实际工作情况来看,其中交通路网、通信路由等影响最短路径规划准确性的主要因素;可在巡检地图中预设基础关联节点,最大限度地缩短各节点之间的距离,以保证500kV 变电站可视化智能机器人顺利执行巡检任务。
在这样陌生又陌生的环境里,周小羽把自己的老爸换了,常爱兰把自己的老公换了。他们两个又齐心协力把家也给换了,换到了岭北镇。但岭北镇还是陌生的。
2.2.2 三维双目视觉巡检路径规划模型建立
根据500kV 变电站的巡检工作需求,建立三维双目视觉巡检路径规划模型,发挥双目视觉技术优势,使智能巡检路径规划程序与相应的控制系统实现双向关联,让可视化智能巡检机器人在双目视觉技术应用支持下,增强自身的实际避障能力。基于双目视觉的变电站巡检路径规划指标参数见表1。

表1 基于双目视觉的变电站巡检路径规划指标参数
结合表1数据,调整与优化双目视觉的变电站巡检路径规划指标参数,再利用专业设备分析与掌握500kV 变电站的巡检路径规划需求,使可视化智能巡检机器人的避障能力得到有效提升的同时,也能确保所规划的巡检路径为最优化[3]。
2.3 变电站智能巡检多场景识别
2.3.1 智能巡检场景识别模型建立
由信息融合的智能展示及虚拟与现实融合的智能操控这两部分共同建立变电站智能巡检多场景识别模型,以可视化载体综合智能展示与智能操控为载体,满足500kV 变电站巡检场景识别的人机互动与虚实结合的需求。智能巡检场景识别如图2所示。
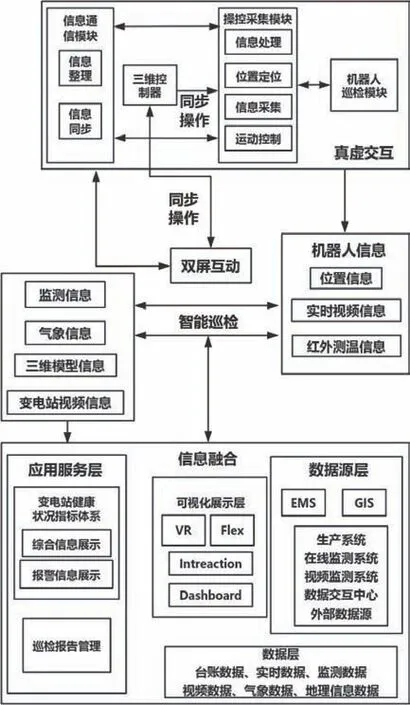
图2 智能巡检场景识别模型建立
可视化智能巡检机器人在500kV 变电站中应用,需要在高精度的三维仿真场景中引入模拟机器人,以保证现实环境与仿真环境中机器人工作的协同性。机器人巡检模块利用双目视觉技术进行距离测量并完成定位导航,再以人工智能与机器视觉为依托,满足变电站可视化智能巡检多场景准确识别的需求。
信息准确性与有效性是实现变电站智能巡检与场景识别的关键要素,做好信息有效性判断检测工作尤为关键。导致信息失效的因素涉及多方面,以变电站中温度信息有效性检测为例;当温度传感器存在故障时,分类温度传感器可能发生的故障,利用以下公式对其可能出现的故障模式进行表示。
bjout(t)=xj或|bjout(t)-xj|=ζ 表示温度信息恒定。
bjout(t)>maxj或bjout(t)<minj表示温度信息超出正常范围。
|bjout(th)-bjout(th-1)|>Δ 表示温度信息突变。
mj>M 表示温度信号振荡。
上述公式中,t 为时间;xj与ζ 分别为常数和非常小的参数;bjout与Δ 表示第j个温度信息实际输出值和比较时间间隔中温度两跳变阈值;maxj为第j个温度允许的最大值;minj为第j个温度允许的最小值;th与th-1表示相邻时间点h和时间点h-1间隔点;h 表示一个正整数;M 与mj表示允许的振荡次数阈值和时间T内第j个传感器温度值的振荡次数[4]。在执行巡检任务期间,若有上述情况出现,则说明温度信息无效,此时运维人员要结合机器人所反馈的信息开展变电站现场检修工作,主要对通信链路进行检修。
综上所述,处于运行状态下的变电站,由于受到各种因素影响而导致变电站内设备发生故障问题时,即可通过智能巡检多场景识别与信息有效性检查掌握变电站内一系列设备运行情况,精准定位故障所在位置,减少故障问题对变电站可靠、安全运行的影响,同时也能为运维人员开展现场检修工作争取更多时间。
2.4 激光传感器选择
为了将可视化智能巡检技术优势在500kV 变电站更好地发挥,合理选择激光传感器尤为关键;其中将3D 激光传感器在智能巡检机器人上进行安装,在一定程度上能够减少周边环境因素对执行巡检任务期间机器人定位精度的干扰影响。搭载激光传感器的智能巡检机器人不仅可以改善所具有导航系统的实际情况,而且能保证巡检任务执行更加顺利,解决巡检机器人在实际导航中各种因素对其位置及航向精度的影响问题。
2.5 机器人轮胎选择
巡检机器人的轮胎及轮毂的问题,是造成可视化智能巡检机器人在执行巡检任务期间出现定位失败的主要因素,机器人在执行巡检任务时若因该原因出现脱轨情况,不仅会对巡检任务执行力产生较大影响,也会降低500kV 变电站运维工作效率。因此,需要结合上述巡检机器人转向方式优缺点对比数据,选择合适的轮胎类型,如镂空实心轮胎,无特殊要求尽可能不使用充气类型轮胎[5]。
3 结语
综上所述,基于500kV 变电站,可视化智能巡检技术的应用,不仅解决了传统巡检工作中存在的问题,又能替代人工操作完成各类型关于变电站的运维工作,如一次设备巡检、红外测温等,减少工作量的同时,也极大地提升了500kV 变电站运维工作效率。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
云南化工(2021年8期)2021-12-21
海洋信息技术与应用(2020年1期)2020-06-11
电子制作(2019年20期)2019-12-04
中国交通信息化(2019年5期)2019-08-30
传媒评论(2019年4期)2019-07-13
能源(2018年8期)2018-09-21
能源(2017年11期)2017-12-13
现代工业经济和信息化(2016年8期)2016-05-17
现代计算机(2016年11期)2016-02-28
