实时三维探地雷达关键技术的设计与实现
2024-03-06 08:52:34尹达辛国亮孙学超张友源张其道
物探与化探 2024年1期
尹达,辛国亮,孙学超,张友源,张其道
(中国电子科技集团公司 第二十二研究所,山东 青岛 266107)
0 引言
当前城市道路塌陷隐患的无损检测主要依靠探地雷达技术。传统的二维探地雷达覆盖面积小,只能获取测线下方地下结构的二维剖面图,实际工程中地下介质的分布是具有三维空间性的,单纯的二维剖面具有局限性,无法对地下介质的情况进行全面、准确的分析[1]。三维探地雷达相较于传统的二维探地雷达能获取地下介质的详细空间分布情况并生成更加直观的水平切片图,并能基于此对数据进行更精确的解释[2],是检测道路最为有效的技术手段。本文介绍了实时三维探地雷达一些关键技术的设计与实现,正是基于这些技术实现了设备的高检测速度和高分辨率等性能,能在快速完成道路检测工作的同时提供高密度的探地雷达数据,帮助解释地下介质分布情况并辨认出塌陷隐患[3]。
1 三维探地雷达设计原理
1.1 实时采集设计
实时三维探地雷达在设计原理上仍然采用超宽带冲激脉冲体制,其收发天线阵列按照一定空间布局进行组合,通过时序控制交替工作,最后通过数据合成算法实现大覆盖、高分辨率的三维探测效果。单次收发天线工作原理同二维探地雷达工作原理一致:通过发射天线向目标检测物发射电磁波,电磁波穿透检测目标后,遇到不同的物体发生折射与反射;通过接收天线将反射回来的回波信号放大、滤波、采集、处理,最终通过探地雷达自带软件进行处理形成雷达图像。实时三维探地雷达舍弃了传统等效采样的采集模式,解放了雷达的扫描速度和工作效率。而它对实时全波形采样的要求尤其重要,需要在单个脉冲发射后,在回波脉冲的时段进行瞬时采样,相较于传统等效采样体制的接收机,省去了雷达天线取样门电路,系统更为简洁稳定[4]。图1所示为冲击脉冲雷达实时采样结构,在工作时控制单元通过时序控制模块来控制发射电路发出雷达脉冲信号P(t),P(t)与天线传递函数卷积后输出雷达发射信号,ADC的高速时钟频率为1/Td,高速A/D在同步脉冲信号触发下对目标反射波r(t)进行高速采样,得到数字信号V(n),完成实时采集。
传统探地雷达等效采样采集得到的信号vout的计算公式为

(1)
式中:Td为采样步进间隔;Δ为采样保持电路高速开关关闭时间;rin(t)为天线接收的信号;C为常数。在这种重复采样模式下,每次发射脉冲过后,运用可调的精准时延(Td)来对回波脉冲进行单次采样。如果Δ远小于rin(t)的变化率,那么vout(Td)就实现了对rin(t)的有效采样和保持。
等效采样模式下用低速ADC进行采样即可,如此数字化的vout(t)就转化成了V(n),即在Td处的数字采样值。等效采样法需要多次(Np次)发射冲击脉冲,以实现对回波脉冲的完全采样。将Np个回波信号的采集值顺序排列,就得到了高频雷达回波信号的一个变慢速的等效信号:

(2)
式中:∂(n)为单位冲击脉冲;Np为发射冲击脉冲次数。
实时三维探地雷达是基于实时采样的全波形数据采集,经过巴伦的雷达回波信号经过射频前端的信号调理电路的增益放大、带通滤波等调理后,根据信号频率范围滤除直流信号和低频信号,将进来的单端信号调理成满足ADC输入范围的差分信号进行采集。式(3)为实时三维探地雷达采集得到的数字信号V(n)的计算公式:

(3)
实时三维探地雷达使用了高速ADC,省去了采样器部分,将延时电路的激励桥式采样门的形式换位为高速时钟产生器,该高速时钟频率为1/Td,作为ADC的输入。实时采样极大解放了等效采样的采集速度,满足了当前三维阵列探地雷达系统的高速探测需求。
1.2 高速探测设计
三维探地雷达使用GC400MHz天线,其最大工作重复频率为128 kHz,对于GC400MHz天线,如果要达到较理想的时域探测效果,采样率就要达到20倍左右,最高采样率应为400 MHz×20,即达到8 GHz的采样频率。8 GHz采样频率的样点之间时间间隔为0.125 ns,即采样点时间间隔T=0.125 ns。设置时窗为60 ns时,取样点数为:N=TW/ΔT=480(TW为时窗,ΔT为采样点时间间隔),则单通道天线最大扫描速率fR为
fR=fPRT/N,
(4)
式中:fPRT为天线重复频率;N为等效取样点数。
在实时采样技术体制下,目前可以实现的高速采样速率可达2.5 GSPS,要实现8 GHz以上的采样频率,可以通过延时重复发射4次信号来完成,单通道GC400MHz天线的最大扫速可根据fR=fPRT/4得到fR=128 kHz/4=32 kHz[5]。 考虑多通道分时工作,按设计10通道来计算,所有通道的最大扫速为32 kHz /10=3.2 kHz,在道取样间隔为2 cm条件下,最高行进速度(三维雷达探测速度)可达0.02 m×3 200×3 600/h=230.4 km/h。按照极限设计32个通道的三维雷达,所有通道的最大扫速为32 kHz /32=1 kHz,在道取样间隔为2 cm条件下,最高行进速度可达到0.02 m×1 000×3 600/h=72 km/h。
综上所述,即使考虑高速通道切换开关的影响,所有通道以内插方式进行工作,三维探地雷达亦满足32通道工作时60 km/h(2 cm道间隔)以上的探测速度。
2 三维探地雷达系统的设计实现
三维探地雷达的采控系统为FPGA&DSP架构。FPGA部分可以实现的硬件功能包括:控制AD采集、DDR数据缓存、上电时序控制、系统复位、串口GPS信息读取、电池电量I2C读取、编码轮脉冲信号读取以及温度传感器控制等,DSP主要完成数据处理部分。DSP接收上位机的控制命令参数后,通过FPGA控制ADC采集触发时序,实现双通道数据采集,FPGA将采集后的数据传给DSP,经过DSP的预处理,实时上传至上位机;DSP同时将FPGA读取的GPS信息、I2C电池电量和串口编码轮相位信息等传至上位机。
2.1 采控系统基本组成
三维探地雷达采用高性能ADC芯片设计来对雷达回波信号直接进行实时采集处理,图2给出了其采控系统的基本组成。雷达回波信号经过天线接收机接收,经过巴伦调制后直接进入AD9689进行采集,采集的数字信号直接通过支持JESD204B协议的高速传输线进入FPGA中。FPGA 选用Altera公司的10AX066H3F34I25G芯片,经过简单的插值、滤波等处理,再由SRIO将数据传输到DSP芯片TMSC6678进行进一步信号处理。FPGA与DSP之间通过EMIF进行命令交互。DSP接收到高速信号后进行信号处理、融合、打包,然后经由千兆以太网传输到上位机进行显示、存储,完成对雷达回波信号的采集与控制。
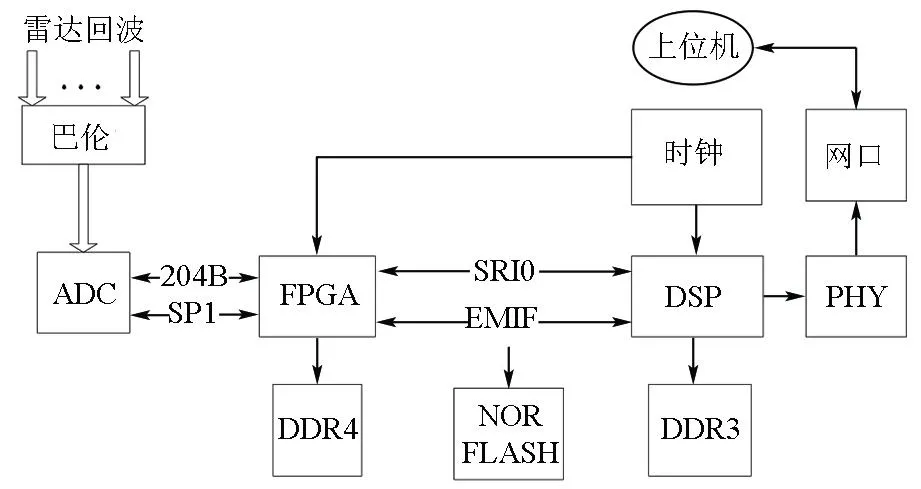
图2 采控系统组成Fig.2 The composition of the system acquisition and control
2.2 电源设计
三维探地雷达为外部输入供电,电源芯片选用DC/DC电源模块和LDO芯片。9~18 V外部电源经由凤凰端子输入后,经过凌特的LTM8049IY与LTM8055IY分别实现-12 V和+12 V电源的转换输出(图3)。+12 V电源通过LTM4644IY转换成系统使用的各个电源:0.9、1.0、1.3、1.2、1.5、1.8、2.5、3.3、3.6 V和5 V,其中,1.2、1.5、2.5、3.3、3.6 V和5 V电源经过LDO转换后给时钟、AD、FPGA、DSP供电。电源有上电时序的要求,在电路设计中,按照芯片的电源上电次序要求进行设计,以保证系统正常工作。
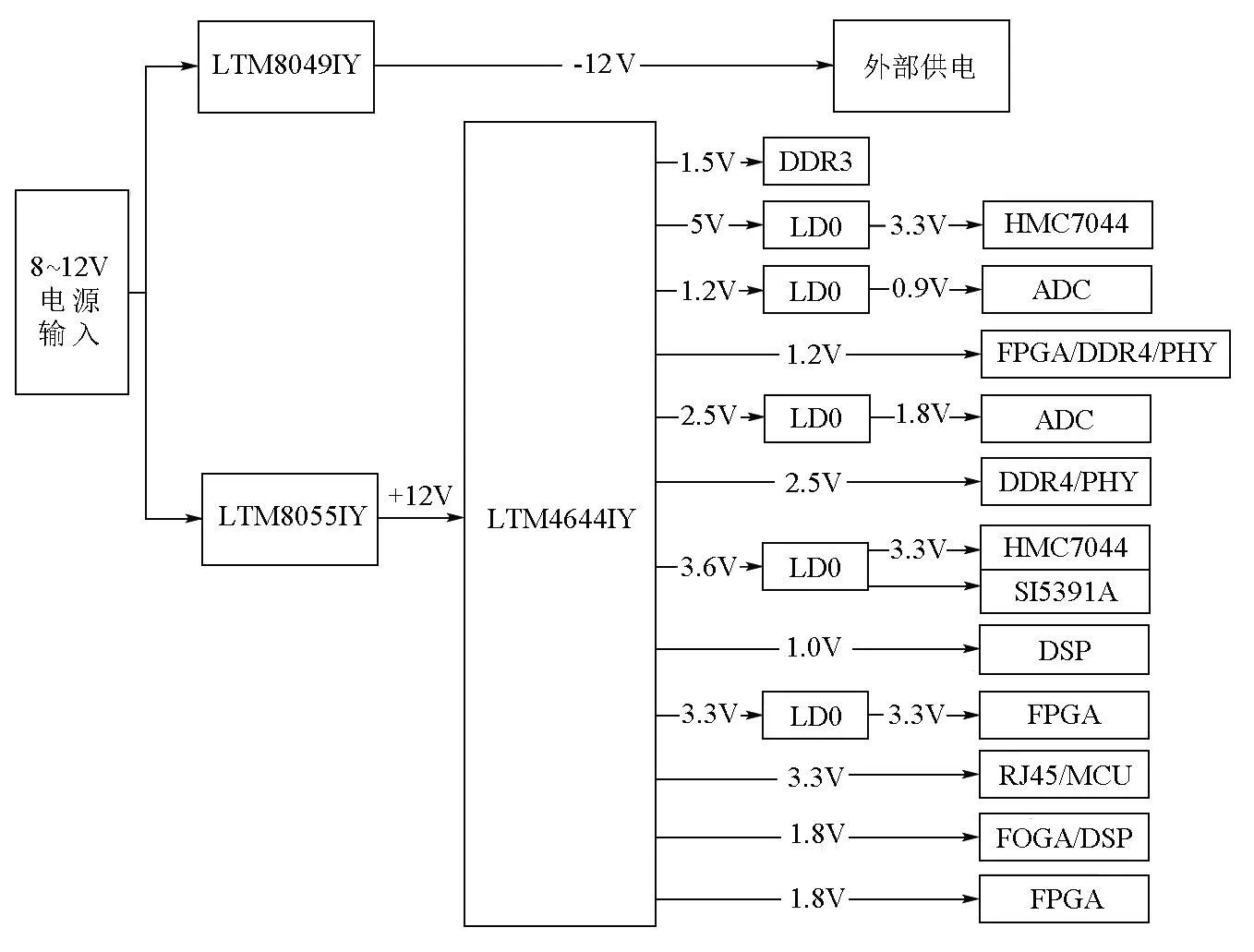
图3 系统供电设计Fig.3 The design of system power supply
2.3 时钟设计
板子有3个SMA口,其中1路为时钟输入,2路为时钟输出。时钟芯片采用HMC7044和SI5391A,HMC7044主要提供JESD204B时钟,SI5391A主要负责提供除JESD204B时钟以外的板内的其他时钟。时钟设计框图如图4所示。HMC7044与SI5391A的功能参数由FPGA进行寄存器配置来实现。
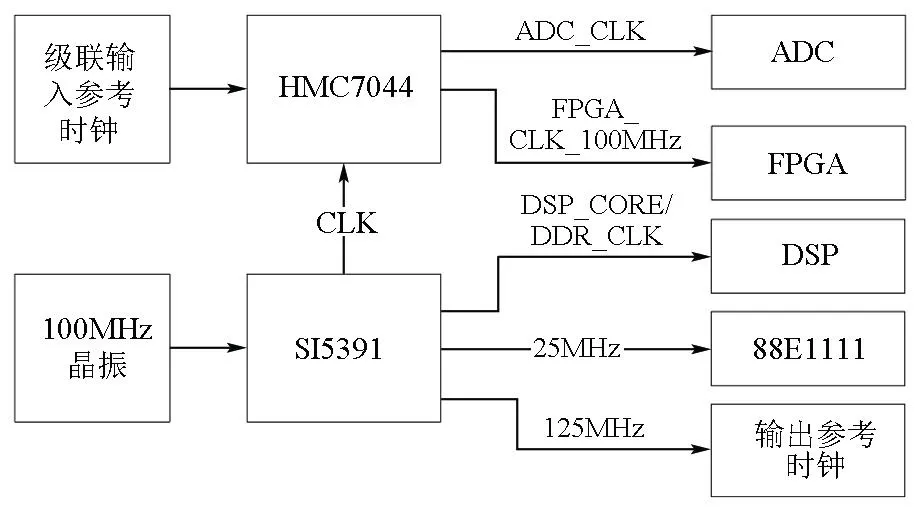
图4 系统时钟设计Fig.4 The design of system clock
2.4 天线设计
电磁波的极化其实并不总是确定的,我们接收到的雷达信号在观测期间状态基本不变,可以认为是完全极化波。设雷达波水平方向x的分量为Ex,垂直方向y的分量为Ey,则雷达波沿+z方向传播时,其电场的复矢量表示为:
E(z)=Ex(z)ex+Ey(z)ey,
(5)
Ex=Ex0cos(ωt-kz+φx),
(6)
Ey=Ey0cos(ωt-kz+φy),
(7)
式中:Ex、Ey分别为x、y方向的单位矢量;Ex0、Ey0分别为x、y分量信号的幅度值函数;kz为传播中的相位延迟值;φx、φy为初相。令θ=ωt-kz,则:
Ex=Ex0cos(θ+φx),
(8)
Ey=Ey0cos(θ+φy)。
(9)
合理的极化方式可以改善雷达目标的检测性能,也可以完成对杂波信号的抑制,能够在极化域内有效地滤除干扰和杂波信号,增强目标回波信号,从而达到提高目标检测性能的目的。本系统的天线是阵列天线,接收机与发射机适合的天线极化方式为水平极化(HH)和垂直极化(VV)。其中,HH极化方式的发射天线与接收天线的垂直距离是14 cm,相邻的接收天线之间的距离是28 cm;VV极化方式的发射天线与接收天线的垂直距离是28 cm,相邻的接收天线之间的距离是14 cm。这里的水平极化与垂直极化与空中雷达的定义有一定的区别,天线收发机排布方式如图5所示,图中T表示发射天线,R表示接收天线。
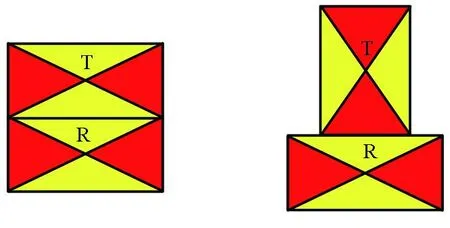
(a) 水平极化方式 (b) 垂直极化方式
三维探地雷达的天线阵列采用吸波材料进行渐变加载的方式对天线进行加载,使天线加载过度更加平缓,从而达到类似行波天线的性能,减少系统的拖尾震荡和振铃反应。为了增加天线的辐射效率,尽量增加天线的辐射面积,对传统平面偶极子天线进行了变形,对天线进行Vee设计,达到V行偶极子天线,通过束缚V型偶极子的天线夹角,使天线具有更好的方向性和更大的增益。同时,为了拓宽天线频带,该天线较其他该类型天线具有较宽的频带宽度,并且在频带内阻抗变化较小,辐射效率最高。
三维探地雷达10个通道的数据由五发六收的天线完成,每个发射天线均带有一个发射机。工作时,每个天线的发射机收到三维雷达主机的控制信号,将信号转换成高幅度脉冲信号,发射机通过发射天线发射超宽带冲击脉冲信号,脉冲幅度不小于220 V,脉冲电磁波在介质中传播,遇到环境特性不同的界面时产生反射与散射。接收天线接收反射或散射信号,将信号送入采集板卡采集回波信号,通过阵列信号分析,得到地下深层目标的三维信息。发射机的皮秒级脉冲主要通过雪崩三极管和阶跃恢复二极管实现,其中阶跃恢复二极管所产生的脉冲上升时间可以达到几百皮秒到几个纳秒,但其幅度较小,一般为几伏;雪崩三极管的脉冲上升沿时间可达几纳秒且具有上百伏的电压,有利于探地雷达深层目标探测。本系统选用雪崩三极管产生发射机需要的发射脉冲。
关于发射天线与接收天线的极化方式的性能问题,分别在空洞实验场和金属板实验场两个不同的场景下进行分析(图6、图7)[4]。
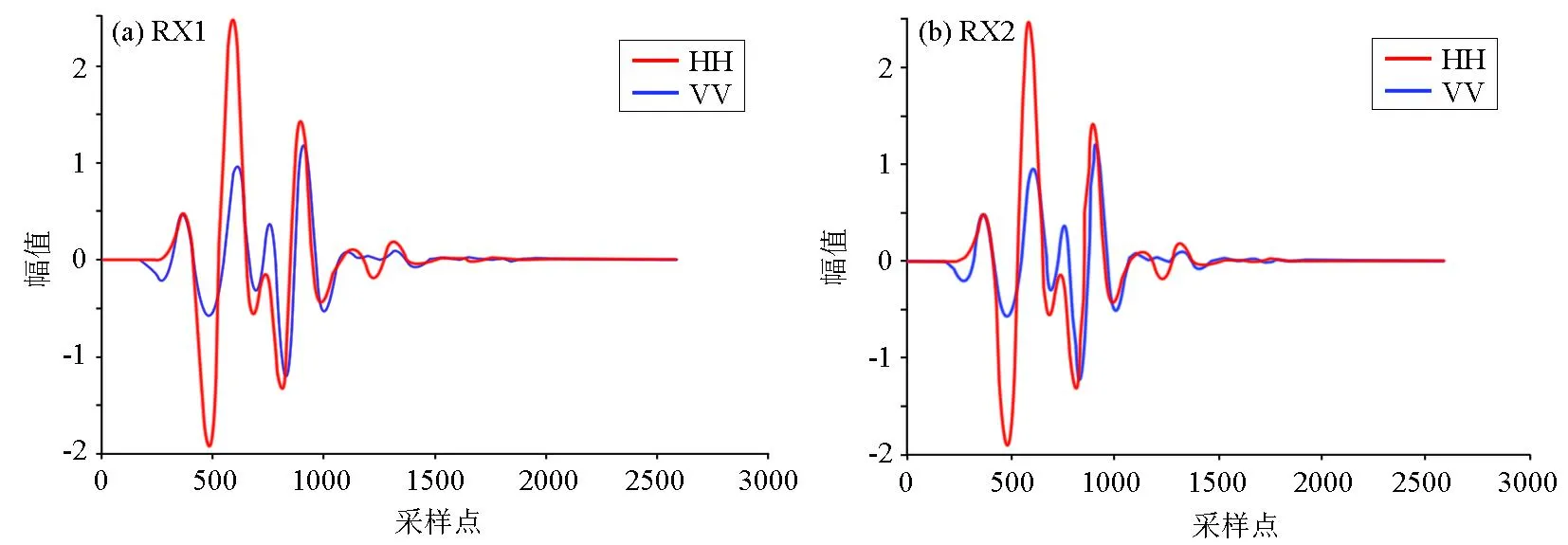
图6 不同极化方式的空洞波形对比Fig.6 The comparison of cavity waveforms in different polarization modes
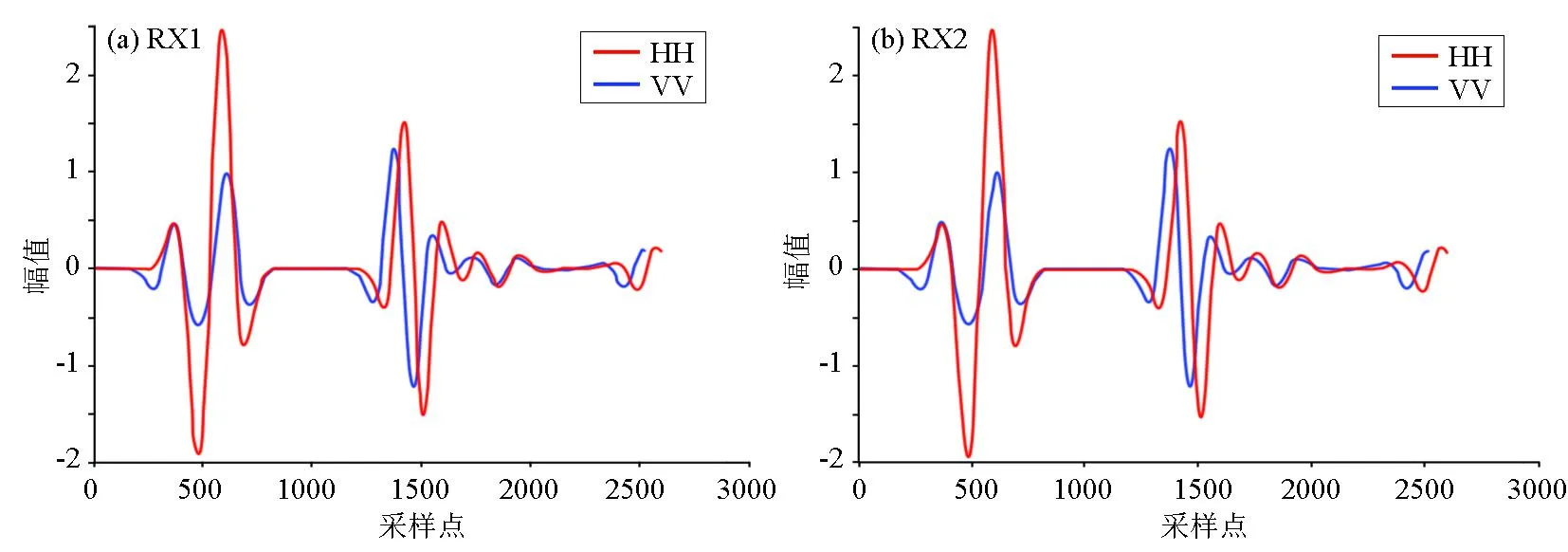
图7 不同极化方式的金属板波形对比Fig.7 The comparison of waveforms of metal plates with different polarization modes
空洞实验场土壤的介电常数为10,空洞目标长为0.4 m,半径为30 cm;雷达发射天线中心频率为400 MHz,三维探地雷达在目标上方中心测线进行探测。分别取HH极化左右两侧的2个典型单道波形(Rx1,Rx2)与VV极化进行波形特性对比,得到如图6所示的不同极化下单道波形的回波。
金属板试验场使用长为1 m,宽为0.8 m的金属板,在金属板的中心点正上方2 m处进行探测。分别取HH极化左右两侧的2个典型单道波形(Rx1,Rx2)与VV极化进行波形特性对比,得到如图7所示的不同极化下单道波形的回波。
从单道波形对比图可以看出,HH极化方式左右两侧的直达波和反射波能量均大于VV极化方式,性能更好。所以三维探地雷达的天线阵列采用水平极化方式,天线阵列共10个通道,为五发六收模式,阵列雷达天线的排布如图8所示。

图8 水平极化方式五发六收天线阵列排布示意Fig.8 The antenna array layout of five transmitter and six receiver horizontal polarization method
5个发射机发射10组雷达脉冲信号。然后由6组接收机接收反射回来的回波信号,中间R2、R3、R4、R5通道4个接收机各复用一次,此过程由FPGA控制开关切换实现。最终,接收的10组回波信号经过高频控制开关分时选择性地进入采集系统,完成模数转换。水平极化的三维探地雷达天线回波信号接收过程如图9所示。
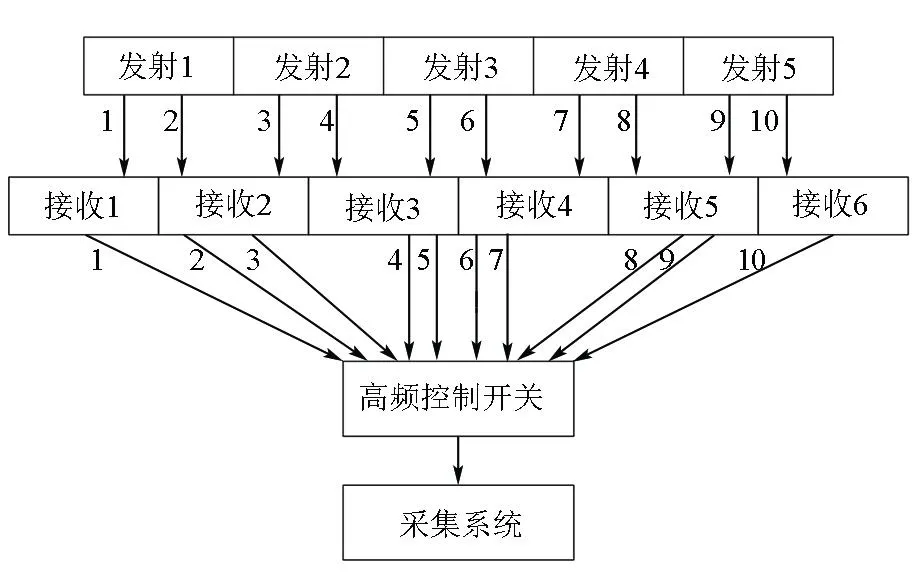
图9 天线回波信号接收控制流程Fig.9 The control process for receiving rcho signals from radar antennas
2.5 采集传输设计
三维探地雷达的采集主要由AD9689完成。AD9689支持宽泛的输入带宽,具有快速的采样率、卓越的线性度以及较低的功耗,用户可以根据下变频器 (DDC)配置和接收逻辑器件的可接收线速,在各种单线、双线、四线和八线配置中配置基于子类JESD204B 的高速串行化输出,支持高达16 Gbps的通道速率。
数据输出通过交叉复用器从内部连接到4个数字DDC,每个DDC 包括多级联信号处理级、48 位变频器(数控振荡器,NCO)以及抽取率。NCO 允许在通用输入/输出 (GPIO) 引脚上选择预置频段,最多可以选择3个频段。
模拟信号经过AD9689采集后,采集的数字信号直接通过支持高速传输JESD204B协议的传输线进入FPGA。在FPGA中拼接完成的数据经SRIO传输到DSP中,经过必要的数据处理后,经千兆高速网络上传至上位机。
3 三维探地雷达系统的性能分析与验证
将三维探地雷达与通用的LTD-2600型单通道探地雷达进行性能对比。三维探地雷达与LTD-2600型探地雷达设置同样的参数:时窗85 ns、采样点数512、扫速256、天线频率400 MHz、无滤波,400 MHz天线对空工作,进行对空直藕波、铜板反射波的采集性能验证实验。在MATLAB中显示两种雷达回波的波形比较图,量化运算处理后如图10所示,图中曲线为1 800道典型数据的叠加结果。因为三维探地雷达的10通道数据均由同一片AD芯片采集,整个系统在同一时钟域内,所有通道数据幅度与相位高度重合,相位稳定度优于LTD-2600型探地雷达的数据。
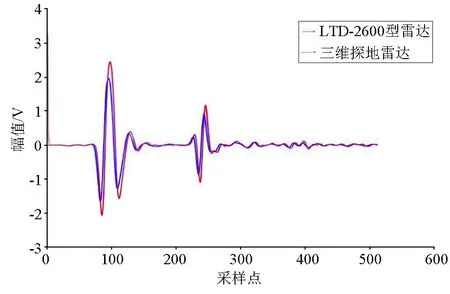
图10 LTD-2600型雷达与三维探地雷达波形叠加对比Fig.10 Comparison of waveform superposition between LTD-2600 radar and 3D ground penetrating radar
图11为量化后LTD-2600型雷达与三维探地雷达1 800道数据中最大值、最小值的各自分布,从图中可以清晰看出三维探地雷达的峰值分布更加均匀集中,幅度与相位一致性更好。
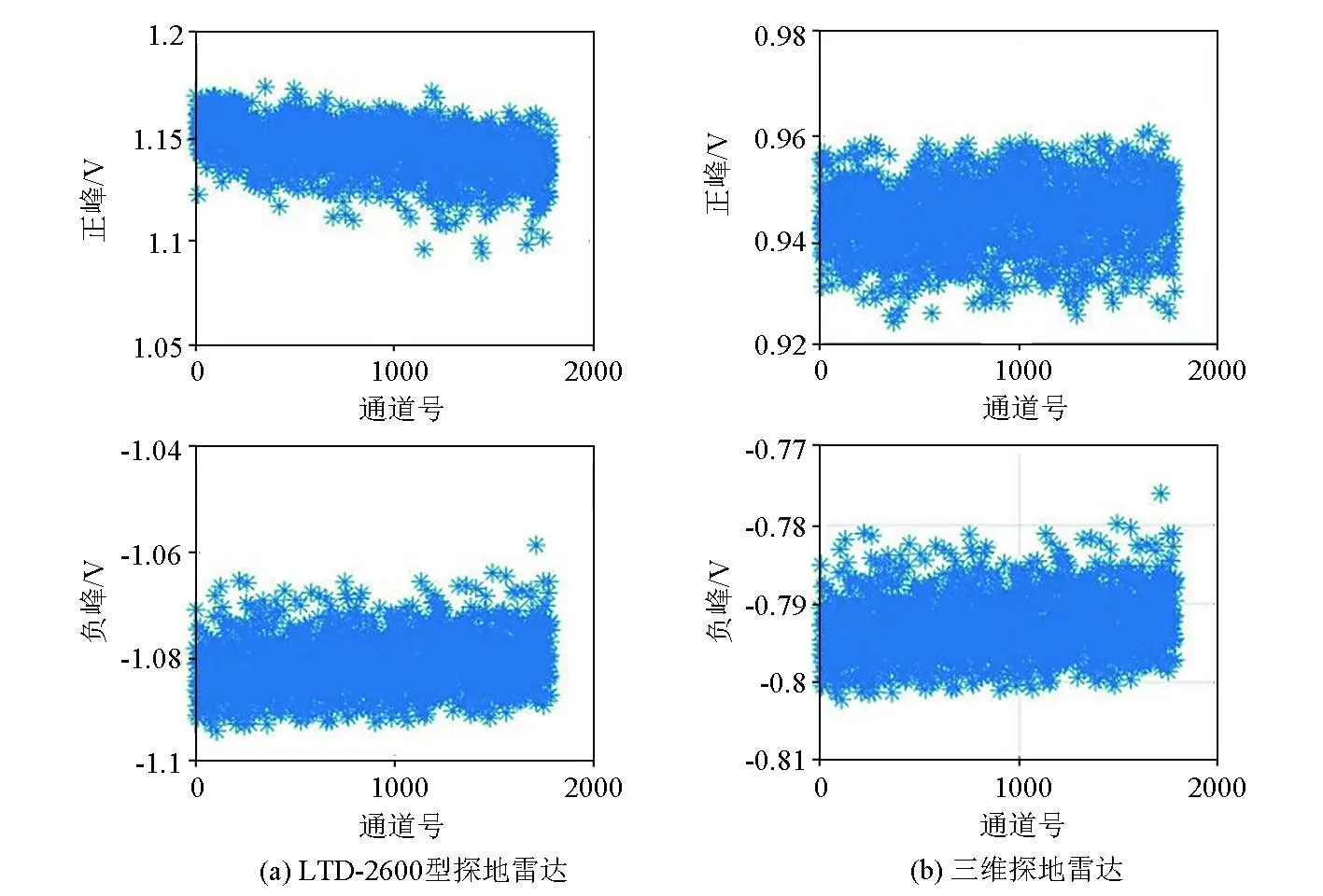
图11 LTD-2600型雷达与三维探地雷达反射波正峰、负峰值分布Fig.11 The distribution of positive and negative peaks of reflection waves from LTD-2600 radar and 3D ground penetrating radar
表1为LTD-2600型雷达和三维探地雷达1800道雷达反射波正峰、负峰的振幅抖动与时间抖动的统计运算结果。由表1可见:三维探地雷达的正峰时间抖动和负峰时间抖动均为0%,说明相位一致性较好。三维探地雷达输出的发射触发信号上升沿时间为1 ns,脉冲宽度1~1 000 ns可调,调节精度为1 ns,抖动标准差为35 ps,其时钟信号输出幅度±1.5 V,抖动3 ps,性能较好,实测结果表明同源的时间抖动非常低,几乎没有。故三维探地雷达的单通道采集的反射波信号时间抖动性能优于LTD-2600型雷达,而其幅度抖动性能与LTD-2600型雷达相当[6]。

表1 雷达抖动性能对比Table 1 Comparison of radar jitter performance
4 结论
1)实时三维探地雷达通过五发六收模式的天线实现十通道雷达数据的高速采集,采用水平极化的天线排列具有更有效的探测效果,具有检测速度快、测量精度高、系统稳定、操作简便等优点[7]。
2)与传统的探地雷达相比,实时三维探地雷达的回波时间抖动效果更好,波形一致性更佳,探测速度更快。
3)数据显示可以以三维体数据的形式以及时间/深度切片的形式进行显示,更加直观高效。根据这个三维数据体就能给出地层的立体图像。在利用不同方向、位置剖面解释的同时,也可利用由浅至深,一层层的水平切片图进行解释,还可以利用三维数据进行属性解释。
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01 06:08:32
数学小灵通·3-4年级(2021年9期)2021-10-12 05:47:46
科技研究·理论版(2021年20期)2021-04-20 01:42:52
雷达学报(2021年1期)2021-03-04 13:46:10
小学生学习指导(低年级)(2020年10期)2020-11-09 09:21:58
通信电源技术(2018年3期)2018-06-26 08:07:02
电子测试(2017年15期)2017-12-18 07:18:51
数学大王·中高年级(2017年2期)2017-02-08 15:52:55
学苑创造·A版(2016年4期)2016-04-16 17:57:51
电源技术(2015年1期)2015-08-22 11:16:18