基于无人机平台两种不同摄影方式的大比例尺成图方法比较与应用
2024-03-04 13:02金云根
江西科学 2024年1期
金云根,冯 锋
(1.江西有色地质矿产勘查开发院,330030,南昌;2.江西省地质调查勘查院基础地质调查所,330030,南昌;3.江西省地矿测绘院,330030,南昌)
0 引言
基于垂直摄影的立体测图方式一直是获取地形图最重要的方法,随着倾斜摄影技术的发展,基于倾斜摄影的裸眼三维测图方法日益成熟,正逐渐成为大比例尺地形图特别是高精度地形图获取的重要手段。由于无人机航空摄影具有空域限制小、任务响应速度快,成本低、轻便灵巧的优点,近年来,基于无人机平台的这2种成图方法已成为大比例尺地形图获取的重要方式。本文从实际工作出发,对基于无人机平台的这2种成图方法进行了详细的介绍,分析了2种方法的优缺点,结合实例对综合采用2种方法开展大比例尺地形图测绘提出了一些有益的建议。
1 基于垂直摄影的立体测图方法
基于“双目视觉”的立体测图方法具有悠久的历史,从20世纪20年代世界上第一台立体测图仪诞生至今已有百余年的历史,先后经历了模拟测图、解析测图、数字测图3个时代。我国在20世纪90年代先后研制成功了2套商业化的具有完全自主知识产权的数字摄影测量工作站(DPW)VirtuoZo、JX4,当时处于世界领先地位[1]。DPW由计算机与相应的摄影测量软件组成,将所有的摄影测量的功能用软件来实现,代替了传统的各种昂贵的精密光学、机械+计算机的摄影测量仪器[2]。基于垂直摄影的立体测图流程详见图1。

图1 基于垂直摄影的立体测图流程
1.1 垂直摄影
无人机平台搭载的垂直摄影相机系统一般为非量测型普通数码相机,经典机型有佳能5D3、尼康D810、索尼A7R2等,常用焦距为35、25 mm。
地面分辨率(GSD)是影响成图精度的重要因素之一,航高与地面分辨率、像元大小、焦距的关系如图2所示,基于垂直摄影的测图比例尺与地面分辨率对应关系见表1。

表1 测图比例尺与地面分辨率对照表

图2 航高与地面分辨率、像元大小、焦距的关系示意图
航高与地面分辨率、像元大小、焦距的关系如下式:
(1)
式中,H为摄影航高(m),GSD为地面分辨率(m),α为像元尺寸(mm),f为镜头焦距,(mm)。
在实际作业中,航向重叠度一般为80%,旁向重叠度一般为50%,航向覆盖超出边界线不少于3条基线,旁向覆盖超出边界线不少于1条航线。
1.2 像片控制测量
基于垂直摄影的像控点(含空三检查点)一般采用飞后区域网方式布点,区域网的图形宜呈矩形或方形,区域网的大小和像控点之间的跨度以能够满足空三精度要求为原则,见表2、表3;像片控制点的目标影像应清晰,易于判刺和立体量测,同时应是高程起伏较小、常年相对固定且易于准确定位和量测的地方[3];测区为弱纹理区域(如林区、草原),难以判刺像控点时则需要飞前布点;一般采用GNSS RTK作业模式测定像控点的平面坐标和高程。

表2 无GNSS辅助航摄区域网布点要求
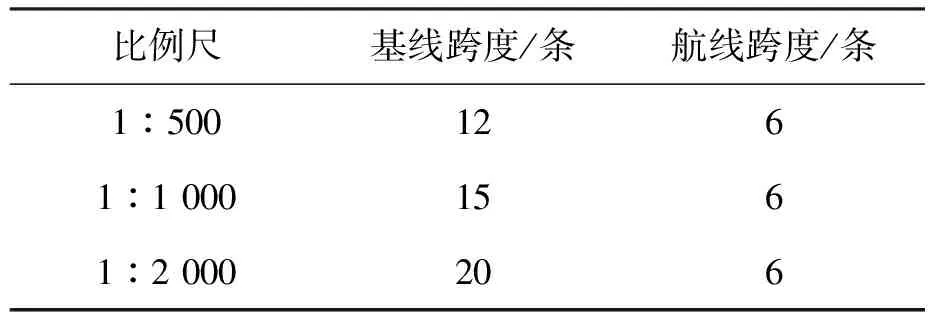
表3 GNSS辅助航摄区域网布点要求
1.3 空中三角测量
空中三角测量是传统航测成图的关键步骤,用于确定区域内所有影像的外方位元素。涉及的主要关键技术有畸变差纠正、影像匹配、区域网平差等。
由于无人机搭载的非量测相机镜头畸变差较大,进行摄影测量时首先要对非量测相机进行检校,获取畸变参数来对像片进行改正。常用的检校方法有检校场法、自检校法和基于多像灭点的检校方法等。
影像匹配是在两幅或多幅具有重叠度的影像中采用特定的算法提取影像间同名点的过程,主要有基于灰度的匹配方法和基于特征的匹配方法[4]。大部分传统的摄影测量商业软件在进行连接点提取时都使用标准的影像匹配技术,如归一化相关系数匹配(NCC)和最小二乘匹配(LSM),但这些方法仅适用于影像尺度一致的垂直摄影情形[5]。
现代空三软件均采用光束法区域网平差模型,光束法区域网平差是一幅影像所组成的一束光线作为平差的基本单元,以中心投影的共线方程作为平差的基础方程[2]。采用GNSS/IMU辅助空三方法可大幅减少像控点所需的数量。目前,市面上有许多成熟的商业化的空三软件系统,国外代表性有inpho、ips、PHOTOMOD等,国内代表性的有GodWord、Pixelgrid等。
1.4 地形要素采集
地形要素采集首先要将空三成果导入全数字摄影测量工作站,通过恢复立体模型来进行采集,国内采用的全数字摄影测量工作站主要有VirtuoZo、JX4、MapMatrix等。目前数字摄影测量工作站前端采集系统一般均基于Nvidia 3D Vision技术,通过3D Vision立体幻镜+3D显示器+Nvidia Quadro专业立体显卡+应用程序的组合来实现。Nvidia 3D Vision立体幻镜采用主动快门式技术,在专业立体显卡及采用3D Vision 技术的大屏液晶显示器的支持下,作业员能够获得非常清晰的真三维立体,结合手轮、脚盘或者3D鼠标可以很方便地实现数据采集工作。
在立体模型下,按照规范、图式要求进行全要素采集,对能准确判绘的地物、地貌按要求直接测绘,对无把握的内业只测绘外轮廓作为疑点留给外业调绘时处理。
1.5 调绘、补测及编辑
大比例尺航测成图的调绘一般多采用先内后外的作业方式。将采集的数据进行整理并分幅打印,到实地进行全面巡视核查,调绘时需做到:走到、看清、问明、绘准。主要工作有:查看内业测图与实地是否相符、表示是否合理、符号运用是否恰当、各种注记是否准确无误等;对于内业漏测、测错或表示不准确的,进行改正并按实地情况进行合理表示;调绘地理名称、居民地名称、房屋层次及结构、电力线连接关系、河流沟渠流向、植被与土质符号的配置及各类说明注记等;由于立体采集时房屋是按屋檐测绘的,当屋檐宽度大于图上0.2 mm时应量取屋檐宽度,并在调绘图上进行标注,供内业编辑改正用。
补测主要是对航摄后的新增地物、阴影区地物、隐蔽部位及地形复杂部位等内业无法或不能准确采集的要素进行实地测绘[6]。补测可采用RTK、全站仪进行数据采集,也可以采用手持测距仪、钢尺通过距离交会法进行补测。
编辑主要是根据外业调绘图和补测数据,通过编辑软件在计算机上进行房檐改正、符号绘制和注记配置、属性录入等,通过图形编辑、修改、拓扑处理、接边等,形成符合图式要求的地形图。
2 基于倾斜摄影的裸眼三维测图方法
相较于传统的立体测图,利用倾斜摄影处理后获取的实景三维模型进行测图的时间并不长,2010年4月,天下图公司引进了美国Pictometry公司的倾斜摄影测量技术,开启了国内实景三维建模的大门[7],为基于倾斜摄影的裸眼三维测图奠定了基础。相较于传统的垂直摄影,倾斜摄影能有效地获取地物侧面纹理,可对同一地区进行多视角重复观测,能获得符合人眼视觉的直观世界的影像等[8]。基于倾斜摄影的裸眼三维测图流程如图3所示 。

图3 基于倾斜摄影的立体测图流程
2.1 倾斜摄影
无人机平台搭载的倾斜摄影相机系统,多采用五镜头马耳他十字结构,由1个下视相机、4个倾斜相机组成,倾斜相机角度一般为45°,如图4所示,能同时从垂直、倾斜等不同的角度采集影像。下视相机焦距常采用25 mm,倾斜相机焦距常采用35 mm,保证了倾斜影像中心点的GSD跟下视影像的GSD基本一致。

图4 Maltese-cross 1+4倾斜多相机系统示意图
已有研究表明,在一定密度的像控点控制下,倾斜三维模型的精度约为GSD的2~3倍[9-10]。在实际作业中,一般按模型精度为GSD的3倍这一经验值,结合成图精度及实景三维模型的表现效果来设计航摄时的GSD,基于倾斜摄影的测图比例尺与地面分辨率对应关系见表4。
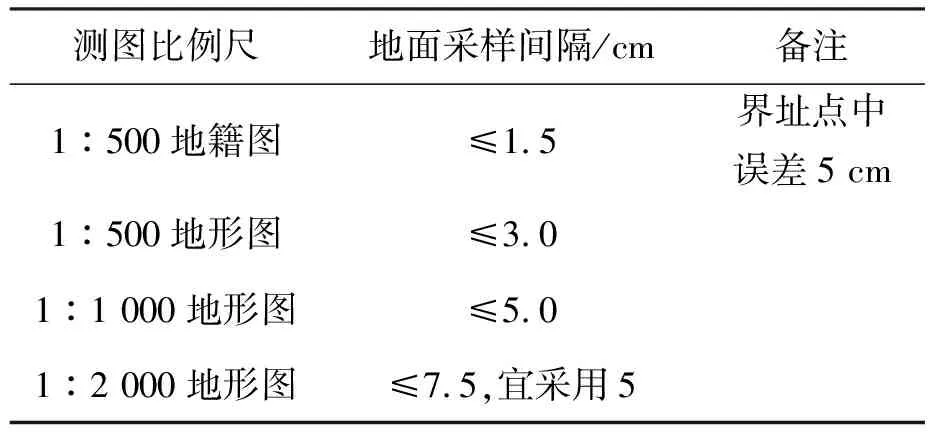
表4 测图比例尺与地面分辨率对照表
在实际作业中,倾斜摄影航向重叠度一般为80%,旁向重叠度一般为70%,为了获取到摄区外围完整的侧面纹理,航向应超出航摄分区一定的基线数,旁向应超出航摄分区一定的航线数,超出的基线数、航线数按式(2)、(3)、(4)计算[11]。
(2)
式中,N为理论超出值(条),θ为倾斜相机角度(°),β为倾斜相机视场角(°),P为航向或旁向重叠度。
在实际飞行中,由于大气等因素的影响,航向或旁向覆盖超出边界线的实际值一般按式(3)和式(4)计算:
N基=N+2
(3)
N航=N+1
(4)
式中,N基为基线数,N航为航线数。
2.2 像片控制测量
倾斜摄影的像控点(含空三检查点)多采用飞前布设方式,位于固化地面上的像控点采用喷漆在地面上喷涂易于分辨的明显标识,位于非固化地面上的像控点可采用腻子粉布设,一般采用GNSS RTK作业模式进行像控点测量,所有像控点均为平高点。
基于倾斜摄影的像片控制点布设方式,作业中一般采用区域网方式布点,按照经验数值,相邻像控点的实地间距为10 000像素至20 000像素之间[12],具体可根据测区航摄时航向及旁向重叠度、高差、测区纹理、测区的精度要求布设合适密度的像控点。当采用差分GNSS辅助航摄时,相邻像控点的间距可以适当放宽。
一些学者对像控点的布设与三维模型精度之间的关系进行了研究试验,毕波等[13]试验表明,像控点的数量直接影响模型的精度,三维模型的精度与像控点的数量呈非线性正相关;当像控点数量较少时,增加像控点的数量能明显提高三维模型的精度,当像控点数量增加到一定值时,模型精度提高不明显。王朝辉等[14]采用纵横CW-15垂起固定翼无人机搭载睿铂DG4-Pros全画幅五镜头倾斜相机,采用差分GNSS辅助航摄5.5 km2的范围作为试验区,GSD 3 cm,试验区内高差≤5 m,属于平坦地区;利用RTK实测了22个检查点,对生产的三维模型进行了精度检核,像控点数量与模型精度关系见表5;通过比较发现,随着像控点数量的增加,模型的平面精度和高程精度都有所改善,其中,平面精度变化相对比较稳定,在稀疏像控点的情况下,平面精度也可以保证,而高程精度会随着像控点的布设位置和数量变化带来明显改变。

表5 像控点数量与模型精度统计表
2.3 空中三角测量和倾斜三维模型生产
倾斜摄影空三和实景三维模型生产涉及到的主要关键技术有多视影像之间的同名匹配、联合平差、密集匹配技术、表面模型重建(几何重建和纹理映射)等[15]。
同名匹配的作用是恢复影像间的相对位置关系,由于倾斜影像具备多角度、大倾角的特点,造成影像具有较大的透视变形、尺度和光照变化,传统摄影测量的匹配方法不再适用[5]。许多学者开展了大量的特征提取和匹配算法方面的研究,推动这项技术朝着高精度、全自动的方向发展,现有算法侧重于旋转、平移、尺度、仿射变换等影像变换的处理,面向复杂地形条件下的匹配能力还有待提升[4]。
采用多视影像联合平差技术进行倾斜影像区域网平差,与传统摄影测量区域网平差相比,倾斜影像空三在数学模型上基本一致,主要差异在于像点观测值数目要远远多于传统垂直摄影的方式[5]。
密集匹配是在恢复影像间的相对位置关系后在重叠区域内寻找每个像素同名像点的稠密影像匹配方法,通过密集匹配可以得到高精度高密度点云数据,是从二维航摄影像自动重建三维模型的最有效手段之一。目前,航摄影像的密集匹配普遍采用半全局匹配方法[16]。
几何重建是利用匹配的密集点云构建不规则三角网,每个物体都可以使用多个不规则三角网来构建,三角网的大小、多少跟地物的复杂程度、航片的重叠度的高低关系密切;几何重建之后就是纹理映射,计算毎一个三角形面片和对应的影像区域之间的几何关系实现不规则三角网与纹理影像之间的配准,将配准好的纹理映射到三角面片上,生成实景三维模型[17]。
倾斜摄影数据处理的众多关键技术依然是摄影测量和计算机视觉领域的研究热点,基于深度学习的影像匹配是其中的一个重要方向[4]。目前,市面上推出了许多商业化的三维重建系统,国外代表性的系统有StreeFactory、ContextCapture、PhotoMesh、Pix4D、Metashape等。国内代表性的系统有DP-Smart、Mirauge3D、GET3D等。
2.4 地形要素采集
在裸眼三维测图软件系统中加载倾斜三维模型,全要素采集各类要素,采集要求跟基于垂直摄影的立体测图方式是一致的。国内应用较多的裸眼三维测图软件有EPS、DP-Mapper、Idata_3D和TSD 3DMapper等。
2.5 调绘、补测及编辑
调绘、补测及编辑等工作跟基于垂直摄影的立体测图方式所对应作业方法、要求基本一致。由于房屋采集时直接采集到了墙面,调绘及编辑工作中最繁琐的房檐改正工作基本省略,对房屋较多的测区效率提升明显。
3 2种成图方法的优缺点及综合应用
3.1 传统立体测图的优缺点
优点:作业方法成熟,航摄时影像数量较少,空三加密对计算机的硬件要求较低,能够以较低的GSD获得清晰立体效果,在建成区外围1:500~1:2 000比例尺以及小于1:2 000比例尺测图中具有很大的优势。在有植被的地方,可以通过植被缝隙将测标压到地面上采集地面高程。
缺点:采集时需专门的数字摄影测量工作站,需佩戴立体眼镜配合手轮脚盘进行作业,同时受人眼“视差”的影响,作业员需要一定的工作经验,训练周期较长;在城乡建成区1:500~1:2 000比例尺立体数据采集时,由于一般只能测绘房顶,外业调绘及内业编辑时房檐改正这块工作量较大,同时房檐的准确宽度也不容易量取,对地形图的精度影响较大。
3.2 裸眼三维测图的优缺点
优点:通过提高航摄时的GSD,可以获得较高的成图精度,可用于立面测绘、古建筑测绘、地籍测量,近年来在农村“房地一体”的不动产确权登记及古建保护中得到了大量的应用。倾斜摄影生成的三维模型具有跟实地一致的形状、纹理、坐标,支持全方位的浏览与量测,可直接采集到墙面,省略后续房檐改正的工作,也减少了因房檐改正引起的误差,采集过程中可以判绘房屋层数与建筑结构、部分单位名称等,在这方面较传统航测成图方法有较大的技术优势[18]。三维模型由于具有实地的一致性,对测量人员的技能要求降低了,不需要较长时间的专业训练就可以进行测图作业。跟传统立体测图方式相比,不存在“视差”影响,量测的数据精度基本取决于模型精度,特别是高程采集方面,减少了人为误差。
缺点:航摄时影像数量多,倾斜影像造成同名点匹配困难,空三加密和三维重建对算力要求较高,耗时也长,特别是三维重建需要配备高性能的计算机集群。由于倾斜三维模型是基于密集匹配点云的几何及纹理重建,容易造成消防栓、通讯杆、电杆、路灯、电缆标、旗杆、里程碑、检修井等点状地物以及管道、栅栏、篱笆、铁丝网、小水沟、微地貌等在三维模型中表现不够清晰或部分缺失,当GSD>5 cm时这种情况更为明显,容易造成此类地形地物无法采集或采集困难,增大了外业调绘补测的工作量。高程点采集时是基于模型表面的自动提取,在有植被的地方难以采集到地面高程。
3.3 综合采用2种成图方法进行大比例尺测图
金云根[18]在西藏自治区桑日县城规划区1:500地形图测绘项目中,针对青藏高原地区的特殊环境条件,选用适宜高原飞行的无人机系统进行倾斜摄影和垂直摄影,基于倾斜三维模型测图和传统立体测图相结合的方式进行作业试验。试验区地处雅鲁藏布江北岸河谷地带,为典型的高山谷地地形,平均海拔约为3 600 m,试验区面积约4.5 km2,地势较为平缓。
按飞前布设方式,试验区较均匀地布设了57个像控点及空三检查点;利用飞马D2000多旋翼无人机按仿地飞行模式进行倾斜摄影,航向重叠80%、旁向重叠65%、GSD 3 cm、相对航高191 m;同样用D2000搭载D-CAM2000正射相机进行垂直摄影,航向重叠80%,旁向重叠65%、GSD 5 cm、相对航高319 m;倾斜摄影采用ContextCapture 4.4.16进行空三测量及OSGB格式三维模型重建;垂直摄影采用GodWork3.1.8自动空中三角测量系统进行空三加密,导出Patb格式空三成果供全数字摄影测量工作站使用。
首先在EPS2016软件系统中加载倾斜三维模型对测区建城区进行裸眼三维测图,全要素采集各类要素;对于非建城区的地形地物要素以及建城区三维实景模型上一些不易分辨的或者不方便采集的地形地物要素,通过将GodWork的空三成果导入VirtuoZo2014数字摄影测量工作站,在立体模型上进行采集。对2种方式采集的地形地物要素粗编后制作调绘底图,通过外业调绘、补测、内业编辑获得试验区最终的地形图成果。综合采用2种方法测图流程如图5所示。

图5 综合采用2种方法测图流程
对研究区测绘成果进行数学精度评定,在研究区较均匀分布并用RTK及全站仪测定了196个平面检查点,125个高程检查点。经验证,平面中误差0.125 m,高程中误差0.062 m,详见表6、表7,满足规范要求。

表6 平面精度统计表

表7 高程精度统计表
试验区综合采用2种测图方法进行全要素采集,不需要进行房檐改正,所有要素基本做到了应测尽测,减少了外业调绘和补测工作量80%以上,整体效率远优于单一测绘方式,降低了劳动强度,显著提高了作业效率和质量。
4 结束语
这2种成图方法在今后很长一段时间内都将是地形图获取的主要手段,2种方法各有优缺点,可根据测区的具体情况,综合采用2种方法成图。对于建城区外建筑物较少的范围可采用垂直摄影、传统立体测图方式进行大比例尺地形图测绘,以提高作业效率;对于建城区房屋较多的范围可采用倾斜摄影、裸眼三维测图方式进行大比例尺地形图测绘,从而避免了后续繁琐的房檐改正工作,也减少了因房檐改正引起的误差,对于三维实景模型上一些不易分辨的或者不方便采集的地形地物要素可采用传统立体测图方式进行补充采集,大幅度减少外业调绘和补测的工作,作业效率及质量得到明显提高。近年来,随着大面阵数字相机的发展,基于无人机平台的中画幅垂直摄影相机和倾斜摄影相机正日渐普及,无人机机载Lidar和SLAM技术也越来越多地运用于大比例尺地形图测绘;同时人工智能领域的计算机视觉技术和深度学习技术中的新理论和新方法正逐渐融入摄影测量,推动着基于无人机平台的大例尺地形图测绘向智能化、自动化方向发展。
猜你喜欢
小哥白尼(趣味科学)(2020年3期)2020-07-27
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
军营文化天地(2018年2期)2018-04-20
铁道勘察(2018年1期)2018-03-02
中国资源综合利用(2017年2期)2018-01-22
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
创新作文(小学版)(2016年10期)2016-11-11
铁道勘察(2016年4期)2016-10-14