铁路车辆蛇行运动稳定性的主动控制方法研究
2024-03-01 05:46:24骆余波
铁道车辆 2024年1期
骆余波,沈 钢
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804;2.同济大学 铁道与城市轨道交通研究院,上海 201804)
众所周知,随着速度的提高,车辆的蛇行运动会变得不稳定。如果可以控制蛇行运动,则可以提高列车的临界速度,也可以提高乘客乘坐的舒适性。如今,主动控制技术已应用于倾摆控制、主动径向控制、主动横向悬挂控制等[1]。一些研究人员也开展了主动稳定性控制方面的研究,PEARSON和GOODALL在2003年提出了一种高速铁路车辆的主动稳定控制系统[2]。2018年,YAO和WU设计了3种不同的构架振动控制配置装置,并比较分析了它们在提高高速列车转向架横向稳定性方面的性能[3]。
本文提出了一种新的控制方法来解决某型地铁车辆的稳定性问题。构架上设置了2个作动器,由执行器控制,每个作动器都具有相对于构架的横向自由度。当2个质量块同向运动时,会影响构架的横向运动;当2个质量块运动方向不同时,会影响构架的摇头运动。将这两种运动结合在一起,可以抑制构架的横向振动和摇头振动。
1 地铁车辆转向架模型
利用SIMPACK软件建立构架与作动器的动力学仿真模型,如图1所示,可以直观地显示车辆的蛇行运动情况,观察控制器对车辆蛇行运动的抑制效果。本文建立了某型地铁车辆转向架的动力学模型,并在前后各添加一个作动器,作动器能够相对于构架横向运动,对构架施加控制力。
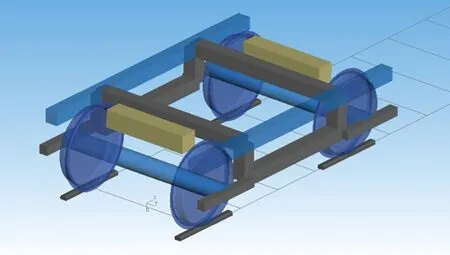
图1 SIMPACK车辆转向架动力学仿真模型
动力学仿真模型包括1个构架、2个轮对、4个轴箱和2个作动器。构架取6个自由度,即纵向、横向、垂向、侧滚、摇头、点头;轮对取6个自由度,即纵向、横向、垂向、侧滚、点头、摇头(其中轮对垂向和侧滚运动是非独立运动);轴箱取1个自由度,即点头。作动器取6个自由度,即纵向、横向、垂向、侧滚、摇头、点头。模型刚体自由度共有34个。
2 仿真模型
2.1 作动器主动控制原理
蛇行运动失稳体现为轮对与构架耦合、轮对与构架各自的横移与摇头模态耦合的复合运动,侧滚与横移摇头模态耦合作用相对不明显[4-5]。本文的控制方案中,在构架的前后两端设置横向的作动器。两者同向运动可对横移模态控制,反向差动可对摇头模态控制,如图2、图3所示。针对横移与摇头两个模态,分别设置了单独的控制回路。
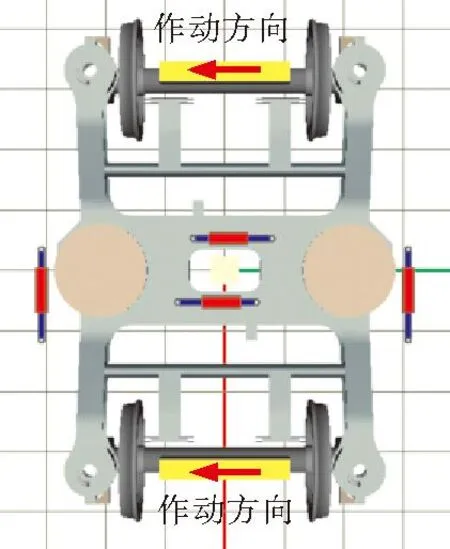
图2 横移控制
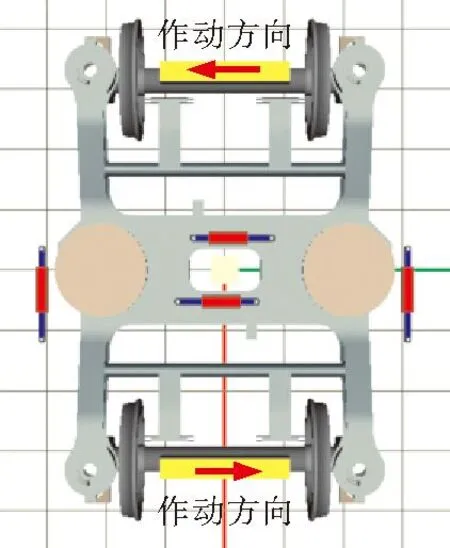
图3 摇头控制
2.1.1 构架横移的控制策略
构架和质量块的横向运动公式可以简化为:
(1)
(2)
式中:Mb为构架的质量,yb为构架的横移量,C为构架的阻尼,k为构架的刚度,F为构架与作动器之间的横向作用力,Mz为作动器的质量,yz为作动器的横移量。
将yb作为x1,将yz作为x2,建立一个状态变量:
(3)
系统的横向运动模型可以表示为:
(4)
式中:Cys为构架的等效阻尼,Y为状态变量的矩阵,X为状态向量。
作动器与构架之间的作用力根据线性状态反馈控制器进行计算。本文在设计反馈控制矩阵K时,采用了LQR控制器[6],它是一种基于状态空间方程的最优化控制方法,F的表达式如下:
F=KX
(5)
定义代价函数J为:

(6)
式中:T为运动总时间;u为控制输入向量;Q和R是正定矩阵,表示状态和输入的加权系数;q1、q2、q3、q4为4个状态变量的加权系数。
根据最优控制理论[7],如果满足以下等式,则代价函数J将被最小化。控制输入向量U的表达式如下:
U=-KX=-RBTPX
(7)
式中:B为常值矩阵,P为对称矩阵,P=PT>0。
-PA-ATP+PBR-1BTP-Q=0
(8)
式中:A、B、P都是常值矩阵。
K=
1.0×106[8.455 8-0.045 2-3.162 3-0.042 2]
(9)
2.1.2 构架摇头的控制策略
构架和质量块的摇头运动可以简化为:
(10)
(11)
式中:Ib为构架的转动惯量,h为作动器与构架之间的力臂,Fh为作动器与构架之间的力矩,ψb为构架的摇头角,yz为2个作动器的横移量。
(12)
作动器与构架之间的作用力由线性状态反馈控制K进行计算:F=KX
定义代价函数为:
(13)
q2=E1,q3=E12,q4=E1,R=1,得到控制器的反馈向量:
K=
1.0×107[9.734 90.022 5-0.100 0-0.003 8]
2.2 Simulink仿真模型
利用Simulink软件中的simat模块,作为SIMAPCK与MATLAB联合仿真的接口,建立数据交换的通道,将SIMPACK动力学模型中转向架的横移量、摇头角,作动器的横移量反馈给Simulink控制系统,控制系统的数学模型使用LQR控制方法,计算出前后作动器的控制力,并将控制力信号传递回动力学模型,使作动器施加相应的控制力,从而实现抑制转向架的蛇行运动[8-10]。整个系统的联合仿真模型如图4所示。
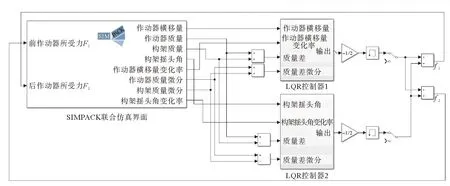
图4 SIMPACK-MATLAB仿真分析模型
3 动力学性能对比分析
将前文中的转向架模型作为基准,在SIMPACK中建立完整的车辆模型,用于后续进行动力学性能分析。车辆模型包括2个转向架、4个轮对,8个轴箱和4个作动器。经分析,4条轮对在动力学仿真结果上差异很小,故选择一位轮对作为研究对象,以一位轮对的仿真结果作为动力学性能的评判标准。后文中的动力学参数均为一位轮对的仿真结果。
3.1 轮对横移量
车辆的蛇行运动主要体现在轮对的横移上。在直线运行的工况下,对轨道施加横向不平顺,转向架在运行一段时间后会发生蛇行运动[11]。图5为不施加任何控制与施加主动控制时轮对横移量随时间的变化情况。
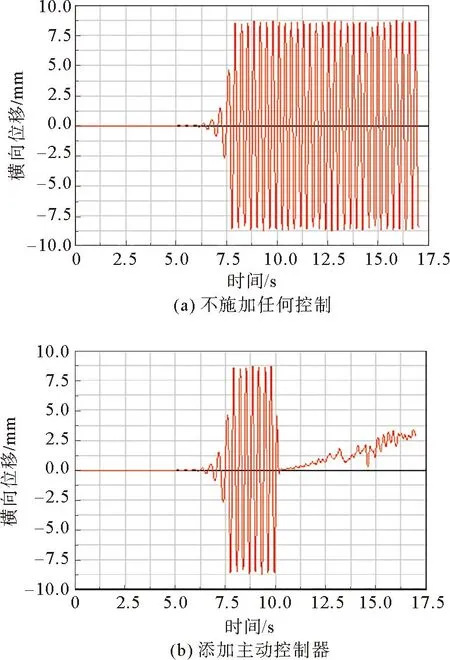
图5 轮对横移量随时间的变化曲线
由图5(a)可知,在不施加任何控制的情况下,构架运行一段时间后,轮对横移量增大并在固定范围内变化,即发生蛇行运动。由图5(b)可知,施加主动控制时,在构架发生蛇行运动2.5 s后,主动控制器生效,轮对横移量减小,减小幅度为66.7%。由此可见,施加主动控制器后,车辆的蛇行运动受到了抑制。
由图5可知,作动器对于车辆蛇行运动的抑制效果具有一定的延后性,延迟时长为2.5 s,生效后可以明显抑制车辆的蛇行运动。
3.2 非线性临界速度
非线性临界速度可以作为评判车辆运行稳定性的指标,通过计算不同速度下的轮对横移量,可以得到模型的非线性临界速度[12]。图6为不施加任何控制与施加主动控制时轮对横移量随运行速度的变化情况。
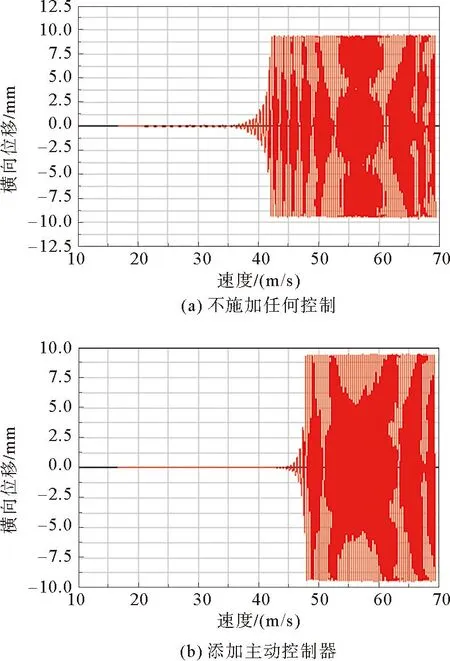
图6 轮对横移量随运行速度的变化曲线
计算结果显示,在不施加任何控制的情况下,模型的非线性临界速度为133.2 km/h,添加主动控制器后,模型的非线性临界速度为154.8 km/h,提高了16.2%,由此可见主动控制器能够提高车辆的运行稳定性。
3.3 运行平稳性
在直线运行工况下,对轨道施加横向不平顺和垂向不平顺激励,设定列车的运行速度范围为90~132 km/h。分别计算不施加控制和施加主动控制时,列车的横向、垂向加速度变化,并以此计算横向、垂向平稳性指标,如图7所示。根据GB/T 5599—2019《机车车辆动力学性能评定和试验鉴定规范》,车辆平稳性指标低于3时的平稳性等级为合格。由图7(a)可知,在所有速度下,主动控制器都能改善车辆的横向平稳性,在速度为110 km/h时改善效果最好,改善幅度为10.2%。由图7(b)可知,在速度为90 km/h和100 km/h时,主动控制器对车辆的垂向平稳性没有影响;在速度为110 km/h至132 km/h时,主动控制器能够改善车辆的垂向平稳性。
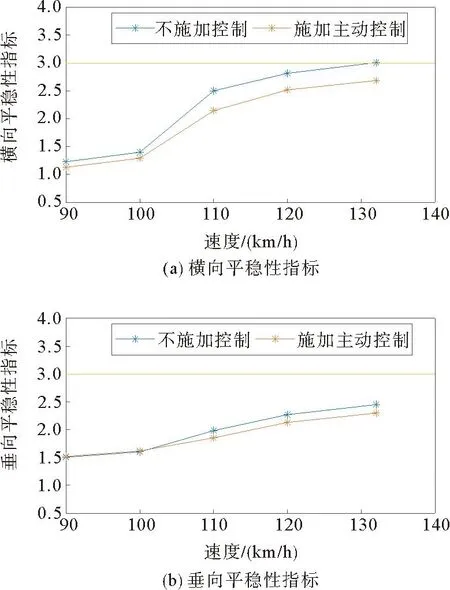
图7 横向和垂向平稳性指标变化曲线
由于作动器的主动控制策略是用于改善车辆的蛇行运动稳定性,所以主要是在横向上起作用,对于横向平稳性改善幅度较大;在高速时,主动控制器对于车辆横向平稳性的改善效果十分明显。
3.4 曲线通过性能
以曲线半径800 m、超高150 mm为例进行曲线通过性能计算。计算中轨道随机不平顺激扰,采用美国五级谱,不施加任何控制和主动控制作用,车辆在90~132 km/h速度范围内的曲线通过性能指标的仿真结果如图8所示。
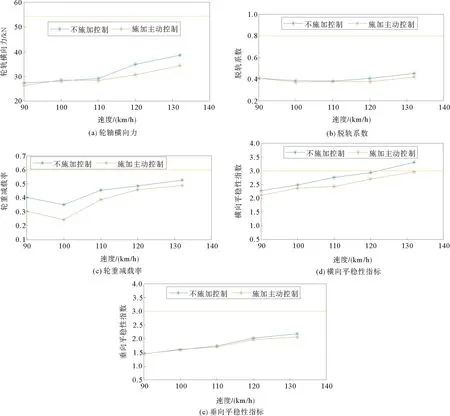
图8 不施加任何控制与施加主动控制时曲线通过性能指标仿真结果
由图8(a)和图8(b)可知,在90~110 km/h速度范围内,主动控制系统对车辆的轮轴横向力与脱轨系数的作用效果与不施加控制相近;当速度超过110 km/h后,主动控制系统对轮轴横向力与脱轨系数有所改善。由图8(c)可知,主动控制系统对车辆的轮重减载率有一定的改善作用,其中在90~110 km/h速度范围内改善作用明显,速度超过110 km/h后改善效果有所减弱。由图8(d)和图8(e)可知,由于主动控制系统的控制策略主要作用于横向,施加主动控制对于横向平稳性指标改善幅度较大,对于垂向平稳性指标改善幅度较小;在93~132 km/h速度范围内,主动控制系统均能明显改善车辆的横向运行平稳性。
4 结论
本文提出了一种针对铁路车辆蛇行运动稳定性的控制方法,建立了某地铁构架及主动控制器的动力学模型;采用LQR控制算法,通过SIMPACK-SIMULINK联合仿真,计算车辆的动力学性能,验证了主动控制器对车辆蛇行运动稳定性的改善情况,得出以下结论:
(1) 车辆发生蛇行运动2.5 s后,主动控制器生效,轮对横移量减小了66.7%,主动控制能够有效地控制轮对的横移,从而达到抗蛇行的目的。
(2) 主动控制器能将车辆的非线性临界速度提高16.2%,从而提高了车辆的运动稳定性。
(3) 在直线运行工况下,主动控制器对于车辆横向平稳性指标改善明显,并且不影响车辆的垂向平稳性。
(4) 在主动控制器的作用下,车辆能够安全通过算例曲线,且主动控制器对轮轴横向力、轮重减载率、脱轨系数、横向平稳性有一定的改善作用。
(5) 添加主动控制器后可提升车辆的动力学性能,提高车辆蛇行运动稳定性,可以在铁路车辆工程上应用。
猜你喜欢
计算机测量与控制(2023年8期)2023-08-30 03:35:38
数学物理学报(2021年3期)2021-07-19 06:02:48
装备制造技术(2020年9期)2021-01-26 00:14:42
工程与建设(2019年5期)2020-01-19 06:22:44
中国工程机械学报(2019年4期)2019-08-06 11:21:08
铁道机车车辆(2019年3期)2019-07-29 09:47:46
振动工程学报(2019年2期)2019-05-13 01:45:58
西安航空学院学报(2017年3期)2017-07-05 14:58:36
厦门理工学院学报(2016年1期)2016-12-01 04:50:40
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27