先进的自动驾驶数据采集与存储技术研究综述*
2024-03-01 13:23赵浩源刘金来禹梓浩武涛孙天骏
汽车技术 2024年2期
赵浩源 刘金来 禹梓浩 武涛 孙天骏,2
(1.吉林大学,长春 130022;2.吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
主题词:自动驾驶 数据采集 数据存储 影子模式
1 前言
汽车行驶过程中的数据采集技术当前已不陌生,从行车记录仪的使用开始,已经实现了一段时间内视频数据的记录。随着汽车自动驾驶功能的不断完善与城市道路交通环境的愈发复杂,单纯的视频数据大多只作为交通事故责任划分的依据,而不能为智能汽车自动驾驶功能的完善提供更多、更有效的信息[1-2]。如何高效地找到问题、精准地定位问题并合理地解决问题成为制约下一代自动驾驶技术发展的难题。
先进的自动驾驶数据采集与存储技术将有效解决这一问题。目前,先进的数据采集技术一般分为交通场景数据采集和驾驶行为数据采集。对于交通场景数据的收集,现有方案主要是将激光雷达、毫米波雷达、先进的视觉摄像头和全球导航卫星系统(Global Navigation Satellite System,GNSS)等多套传感器系统组合使用;对于驾驶行为数据的采集,现有方案主要基于车载设备和移动设备开展,同时需要大量的传感器配合。因此,传感器已成为自动驾驶系统数据采集的窗口。
自动驾驶汽车用于数据获取的传感器一般分为外部传感器和本体传感器。外部传感器包括摄像头、激光雷达和毫米波雷达等,其功能是观察、检测和识别车辆行驶过程中的障碍物、道路、车辆和行人等;本体传感器包括轮速编码器、转速计、惯导定位系统等,功能是记录车辆自身的行驶状态信息,可以通过车辆CAN 总线访问。自动驾驶汽车要实现安全有效的自主行为决策与运动控制,需要对交通环境进行精确识别与准确理解,在此过程中,各类传感器利用自身优势取长补短、相互配合,以提供精确的环境数据[3]。为使自动驾驶系统对环境工况完全识别并作出正确判断,现有的主要解决方案为在硬件层面上进行堆叠,而自动驾驶数据采集系统所需记录的数据量也随之增长。
然而,考虑到当前的自动驾驶系统无法处理实际交通场景中的全部工况,一旦自动驾驶汽车发生事故,研究人员需要保留记录以便回溯整个过程,包括事故发生时的行驶环境视频、车辆行驶状态以及驾驶员实际操控指令等,这些重要的信息将帮助研究人员快速、精确地分析事故发生的原因。更重要的是,测试验证及后续路试过程中出现的每个事件都能在一定时间内回溯[4-5]。
而进行自动驾驶功能测试时,绝大多数研发机构仍坚持选择“人工标定”的方法,即除驾驶员外,另外配备一名辅助测试人员坐在副驾驶位置记录每次驾驶员介入自动驾驶系统并接管车辆控制权时的行驶环境,标记为当前算法无法有效处理的工况。这样,研究人员逐渐形成一种类似人工标定异常工况(指自动驾驶算法无法有效处理的工况)的技术流程,但实际标定过程所需的人力成本与时间成本无疑是巨大的,“人-车”控制指令之间的偏差已成为表征数据是否有价值的关键,也将为下一代自动驾驶汽车拟人智能化决策与控制算法开发提供重要理论依据与数据支撑。
2 先进的数据采集技术
以L3、L4级自动驾驶汽车为例,其所需记录的信息主要分为交通场景信息和驾驶行为信息两类[6],包括车辆行驶状态数据、道路交通环境数据、驾驶员操控行为数据、自动驾驶状态数据、执行器状态数据等,相关的输入、输出和中间控制模块如图1所示。
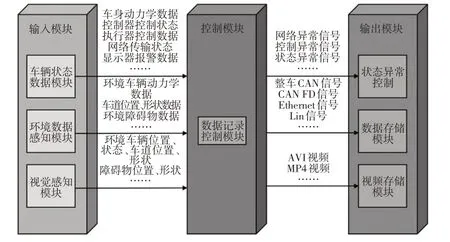
图1 控制执行模块
2.1 交通场景数据采集
交通场景是指车辆在参与道路交通过程中所处的场景,它是无人驾驶算法开发和测试的基础,也是算法落地应用的具体情境[7-8]。针对交通场景数据的采集,现有方案主要将毫米波雷达、激光雷达、超声波雷达和摄像头等多套传感器系统组合使用[9-10]。
毫米波雷达是高级驾驶辅助系统的核心传感器,其探测性能较稳定,作用距离较长,但成本较高、识别行人较困难[11-13]。激光雷达是L3、L4级自动驾驶环境感知系统中的关键传感器,其感知距离较远、覆盖范围广、扫描时间短、探测精度较高,能够实时进行3D 建模[14-16]。超声波雷达成本较低,能实现高精度、短距离测量[17-19]。摄像头主要通过镜头和图像传感器实现图像信息的采集功能,可实现360°视觉感知,并弥补雷达在物体识别上的缺陷,是最接近人类视觉的传感器。
2.1.1 特斯拉传感器配置方案
特斯拉(Tesla)的传感器配置方案如图2所示,每辆车均配有8个摄像头、1个毫米波雷达和12个超声波雷达。
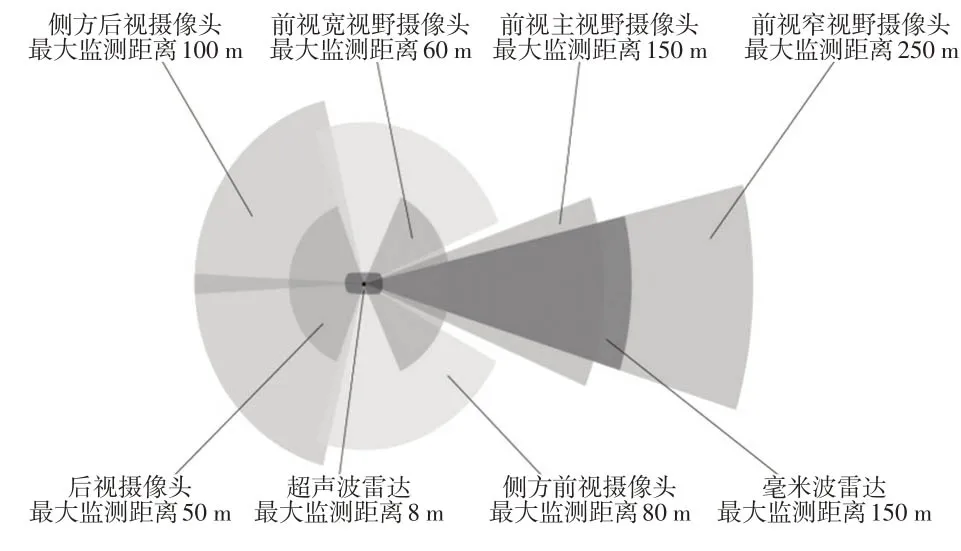
图2 特斯拉传感器配置
在车辆的前风窗玻璃内侧有3个摄像头,分别为前视宽视野(超广角)摄像头、前视主视野(主)摄像头和前视窄视野(长焦)摄像头。超广角摄像头视野较宽,能够拍摄到交通信号灯、障碍物以及车辆周围距离较近的物体,适用于城市街道或低速缓行的场景;主摄像头可覆盖大部分交通场景;长焦摄像头视野较窄,但探测距离足够远,可以清晰地拍摄到远距离物体,适用于高速行驶的场景。在车辆的左、右侧B柱内各有1个侧方前视摄像头,视野范围90°,能够精准判定加塞车辆,在进入视野盲区较大的十字路口时,也能监测到更多场景。在车辆的前轮后方,左、右侧各有2个侧方后视摄像头,用于检测车辆后方盲区。在车辆尾部装有1 个后视摄像头,用于复杂的泊车场景[20-22]。摄像头成像的动态效果如图3所示。
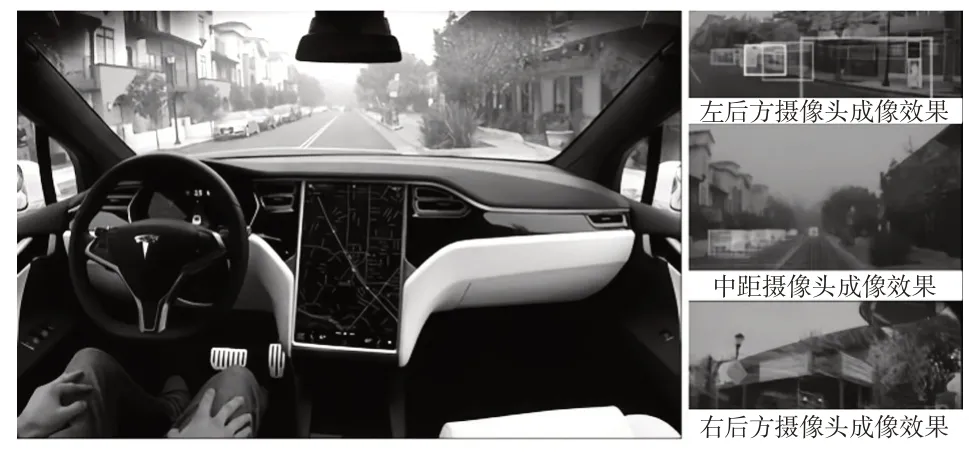
图3 特斯拉摄像头成像动态效果
车辆毫米波雷达的探测角度与长焦摄像头基本相同,但毫米波雷达的特定波长使其在雨、雾、雪等天气条件下均能判断距离,识别前方车辆下方空间,从而弥补视觉传感器的不足。超声波雷达可以探测强行并道的车辆,并可在泊车时判断距离[23]。
通过特斯拉车主手册、隐私声明等渠道的调查发现,该车辆利用3 个系统进行车辆数据的整合,即事件数据记录(Event Data Recorder,EDR)系统、车辆远程信息系统以及完全自动驾驶(Full Self-Driving,FSD)计算平台。其中,EDR系统在Model S、Model X和Model 3车型中均进行了配置,在正常行驶时,EDR系统不会记录数据,当系统检测到碰撞发生或类似碰撞的情况(如撞击道路障碍物)时,EDR系统才会记录与车辆动力学和安全系统相关的数据,主要包括车辆各系统的工作状况(电机转速、横向加速度、纵向加速度、转向盘转角、横摆角速度、横滚角速度等),驾驶员、前排乘员安全带是否系好,驾驶员踩下加速、制动踏板的情况以及车速,便于事故发生后的责任认定。
车辆远程信息系统可以收集更完整的行车数据。其中,电机、自动辅助驾驶(Autopilot)组件、电池、制动、电气系统内的电子模块会记录驾驶过程中的各种驾驶状况和行车情况,主要包括制动、加速、旅程信息和其他行车信息。同时,车辆充电情况(状态、时间)、启用/禁用各系统、诊断故障代码、车辆识别代码(Vehicle Identification Number,VIN)、车速,行车方向和地点也会被记录。相比于EDR 系统收集的数据,车辆远程信息系统所收集的数据更加敏感,同时,可访问这些数据的人员范围更广。例如,在车辆的维修过程中,特斯拉工程师可以访问、使用、存储这些数据,车载远程信息系统也会将数据定期无线传送至特斯拉总部。拥有这些数据后,特斯拉将为车主提供远程信息服务等。另外,除车主或租赁公司同意/赞成、警方的正式要求、为特斯拉辩护、法庭下令、用于研究目的(不会泄露车主身份信息)、向下属公司或其信息系统及数据管理提供者披露6个因素外,特斯拉承诺不会向任何第三方泄漏车辆的记录数据[24-26]。
如表1所示,纵观特斯拉自动驾驶硬件处理平台的发展历程,最值得一提的是其于2019年3月自主研发并于2020年10月升级迭代的FSD计算平台。
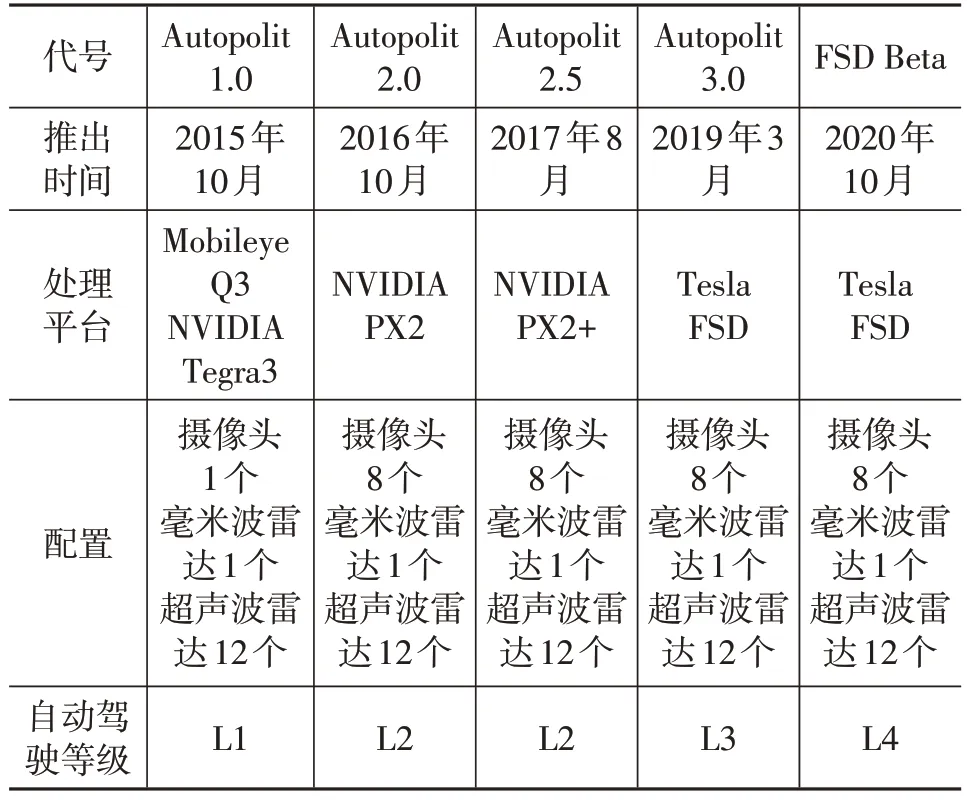
表1 特斯拉自动驾驶硬件平台升级历程
Tesla自主研发的FSD芯片采用三星14 nm工艺,面积为260 mm2,封装了约60×108个晶体管,集成了12 工作频率为2.2 GHz 的Cortex-A72 内核、1 个工作频率为2 GHz 的MAli G71 MP12 图形处理器(Graphics Processing Unit,GPU)、2 个工作频率为2 GHz 的神经处理单元(Neural Processing Unit,NPU)以及各种硬件加速器,同时支持单、双精度的浮点运算。在相机接口方面,FSD 芯片具有1 个摄像头串行接口(Camera Serial Interface,CSI),该接口能够进行每秒高达25×108像素的处理;在视频编码器方面,FSD 芯片集成了H.265(高效率视频编码,HEVC)视频编码器,可用于摄像头显示、行车记录仪和云剪辑记录等;在图像信号处理器方面,FSD 芯片集成了内部带有24 bit 流水线的信号处理器(Image Signal Processor,ISP),每秒能够处理10×108像素,同时具有降噪能力;在神经处理单元方面,FSD芯片集成了2个定制的NPU,每个NPU都封装了32 MB的静态随机存取存储器(Static Random-Access Memory,SRAM)用于存储临时数据。另外,FSD芯片具有专用的神经网络处理器,算力强大(每秒钟可处理144×1012次操作);配有双独立电源,确保安全冗余;水冷设计,散热好(全球首例)。
在FSD 硬件计算平台基础上,特斯拉在软件升级中基于鸟瞰图(Birdview)映射网络及循环神经网络(Recurrent Neural Network,RNN)遮挡处理技术增加了深度预测和时间预测,实现了识别画面从2.5D到4D的变革,主要体现在无高精度地图、无激光雷达的条件下仅凭视觉,利用神经网络学习代替激光雷达来确定物体深度及实现交叉路口预测,如图4、图5所示。

图4 基于FSD Beta的视觉检测

图5 基于RNN及时间预测的交叉口预测
特斯拉FSD Beta 版的更新说明中指出:新的功能可以使车辆在离开高速路的情况下自动变道,并根据导航路线行驶,在路口实现自动转弯。然而,特斯拉FSD 之所以能够实现这些新功能,关键在于其人工智能(Artificial Intelligence,AI)团队正在开发的DOJO 超级训练计算机。DOJO 能够处理大量的视频训练数据,并能够高效地运行带有超大量参数的超空间阵列。DOJO能够从视频中自主地学习和识别先前未被定义或未被标记的信息,如行人、动物、坑洼地段等,进而可以大幅提高训练速度和效率。因此,无论在白天或夜晚,特斯拉FSD Beta 在任何路况下都会以标记大量“点”的方式来构建附近的“实时三维地图”,连续的“点”构成线和面,附近一切静止和运动的目标则会一目了然。
2.1.2 奥迪传感器配置方案
2019 年,奥迪(Audi)公司推出的奥迪A8 车系搭载了交通拥堵导航(Traffic Jam Pilot)系统,这是全球首款搭载L3级别自动驾驶技术的车型[27]。利用前向摄像头以及处理芯片Eye Q3,该车可以实现多车道线识别;利用长距离、中距离毫米波雷达可以实现车辆及护栏的检测。激光雷达与毫米波雷达传入自动驾驶系统的信息不同,是由多条线段组成的一个面。有了面状信息,系统即可精确地判断自身车辆与周围障碍物的位置关系,进而进行精确的控制[28]。其系统主要架构如表2所示。
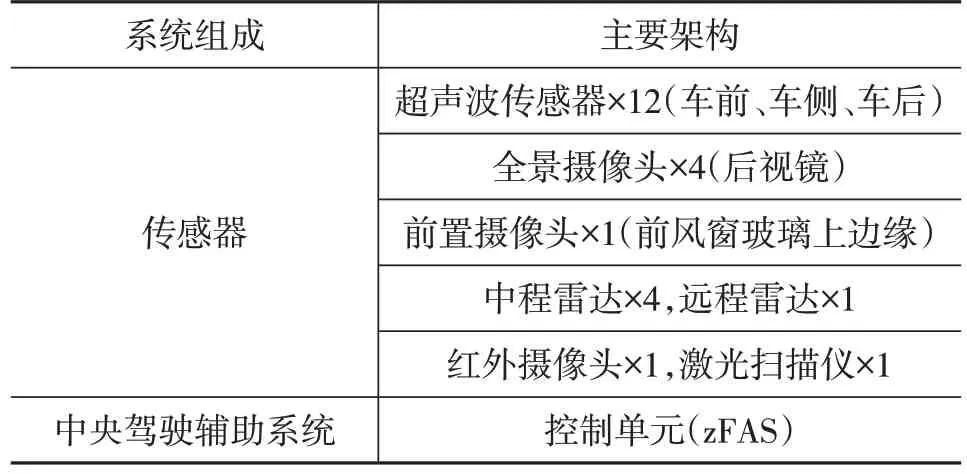
表2 奥迪A8交通拥堵导航系统主要架构
2.1.3 谷歌传感器配置方案
谷歌公司在其改装的捷豹I-Paces自动驾驶车型中配备了第五代传感器系统,该系统可以实现L3 级别的自动驾驶,包括激光雷达系统、视觉系统、雷达系统和补充传感系统[29]。车顶使用1台高性能中远距离激光雷达传感器,将其与一组具有360°视野的立体摄像头整合在同一个整流罩下,同时配备了4 个近距离激光雷达,分布在前、后车牌以及车前轮轮拱处协助处理盲区,并且各增加了1个摄像头与其进行配合。在6个毫米波雷达中,4 个安装在车顶四角与车身成45°夹角、2 个安装在车前轮轮拱处与车身平行探测十字路口侧向来车情况,也可探测侧向车道的车辆和行人,以便于变道决策。毫米波雷达中的天线罩、天线、电路板、机械外壳、固件、软件等均为慧摩(Waymo)自研。全车29个摄像头能最大程度地降低光照条件和极端天气的影响,轮拱处的摄像头可紧盯靠近车辆的异物,车顶前方安装了一组麦克风阵列,用于对声音进行收集。除了以上传感器,车上还装有GPS 接收机、即惯性测量单元(Inertial Measurement Unit,IMU)等传感器用于实现整车定位,帮助车辆更加安全、稳定地运行[30]。其传感器配置发展历程如表3 所示。
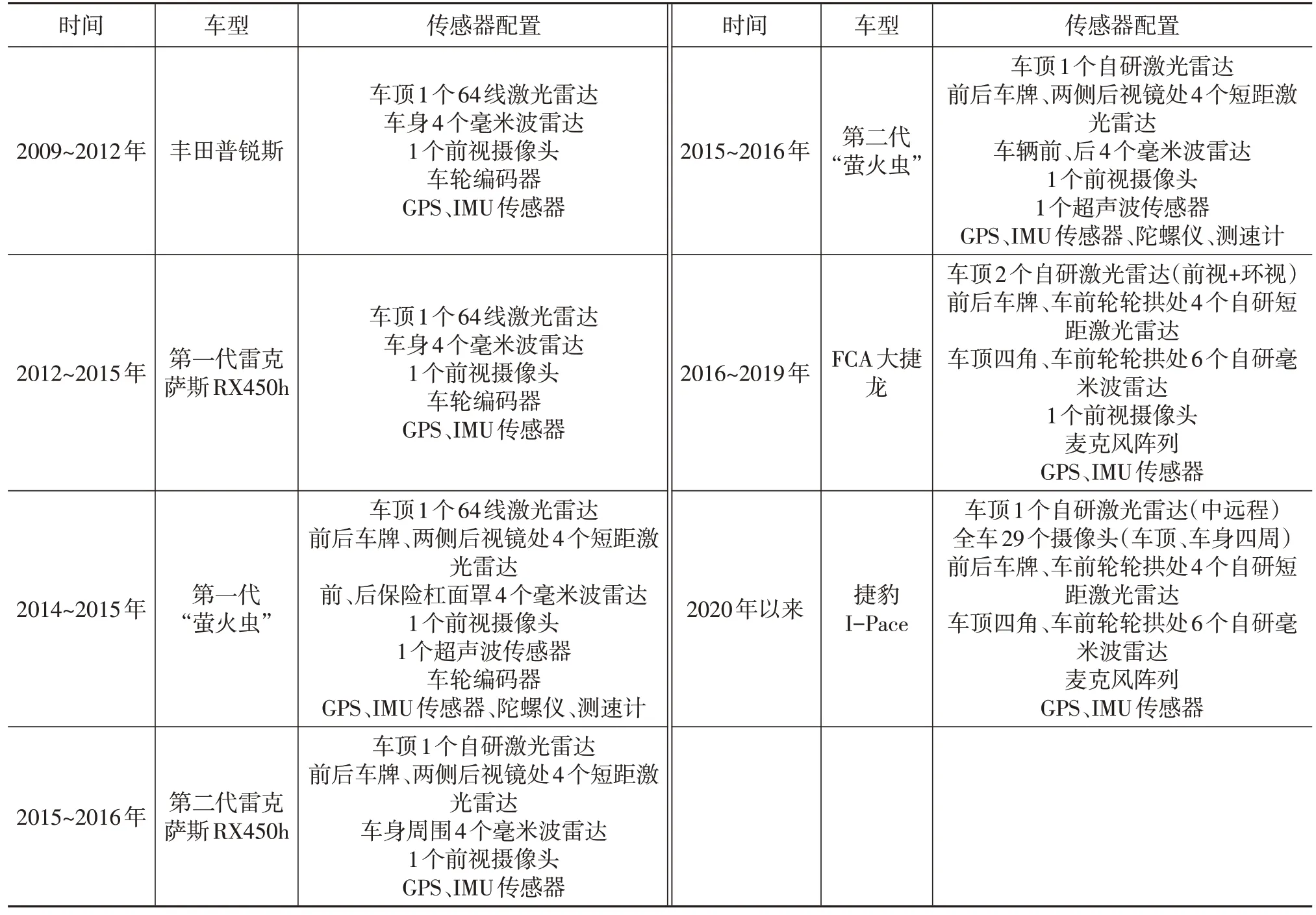
表3 慧摩(Waymo)传感器配置发展历程
2.1.4 华为传感器配置方案
极狐阿尔法S华为HI 版搭载了华为提供的全套高阶自动驾驶解决方案,配备了3个激光雷达(左前、右前及中间)、13个摄像头、6个毫米波雷达、1个车顶惯性导航系统和1个域控制器[31]。该车型配备的车规级高性能激光雷达产品选择了华为自主设计、开发的96 线中长距激光雷达产品,能实现对城区行人、车辆的检测覆盖,并兼具高速车辆检测能力[32-33]。华为自动驾驶全栈解决方案(Autonomous Driving Solution,ADS)系统架构如表4所示。
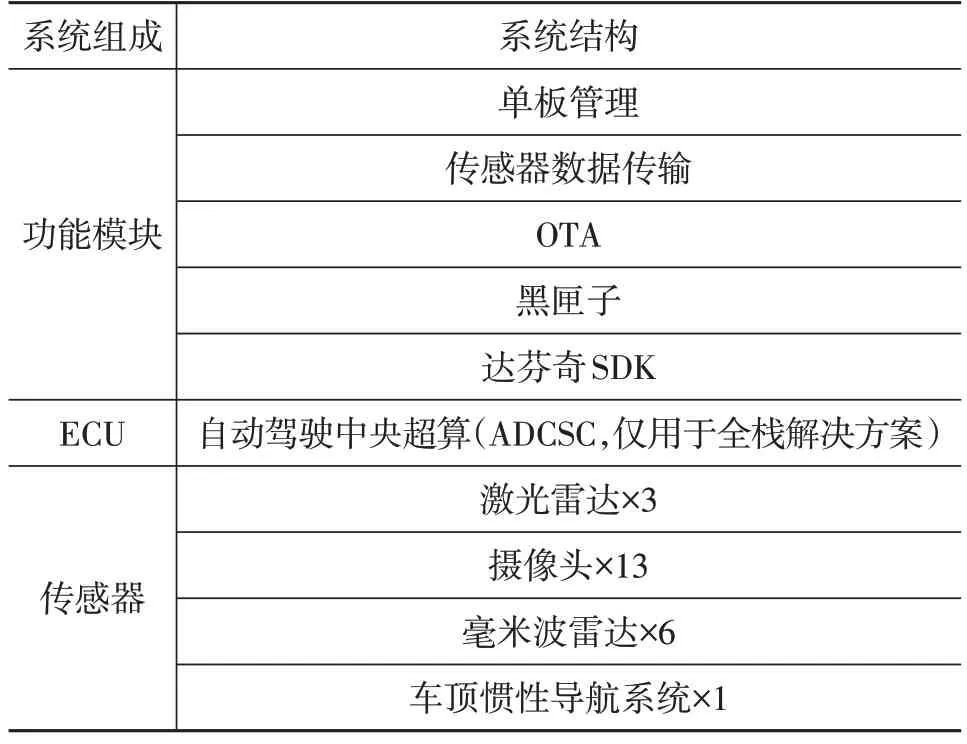
表4 华为ADS自动驾驶系统
2.1.5 理想传感器配置方案
理想在2020年发售的理想ONE车型上搭载了1个ADS 摄像头、4 个环视摄像头、1 个毫米波雷达和12 个超声波雷达,并在2021 年发售的理想ONE 车型上新增了4 个毫米波雷达,同时其前视摄像头升级成了一个800 万像素/120°视角的感知摄像头[34]。2023 年推出的理想L7 车型上的AD Max 辅助驾驶系统搭载了1 个激光雷达、6 个800 万像素摄像头、5 个200 万像素摄像头、1个毫米波雷达和12个超声波传感器。
如表5 所示,对比近年理想车型,理想L 系列强化了依赖摄像头的视觉感知。

表5 理想部分车型传感器配置变化对比 个
2.1.6 蔚来传感器配置方案
蔚来拥有蔚来自动辅助驾驶(NIO Pilot)系统和蔚来自动驾驶(NIO Autonomous Driving,NAD)系统2种自动驾驶系统[35]。NIO Pilot 系统由3 个ADS 摄像头、4 个环视摄像头、5 个毫米波雷达、12 个超声波雷达和1 个驾驶员监控系统(Driver Monitor System,DMS)摄像头组成[36]。3 个ADS 摄像头组成一个三目摄像头,主要可以实现道路标志识别、远近光自动控制、车道偏离预警、车道自动保持、紧急制动辅助、前向碰撞预警等功能。5个毫米波雷达包括1个前置长距离雷达和4个角雷达,主要可以实现车道变换预警、车辆盲点监控、侧方开门预警、前向来车预警、后向来车预警等功能。相较于NIO Pilot系统,NAD系统的感知解决方案AQUILA超感知系统则更加完善。在前置摄像头方面,NAD 系统采用2 个ADS 前视摄像头、2 个侧前视摄像头(瞭望塔式布局)和1 个前置激光雷达,完全能够覆盖NIO Pilot 系统采用三目摄像头情况下的视野探测范围。此外,NAD 系统还增加了1 个前置激光雷达和蜂窝车联网(Cellular Vehicle-to-Everything,C-V2X)通信模块。这些硬件布局的完善使得自动驾驶更加智能化。2 个系统的主要传感器配置如表6所示。
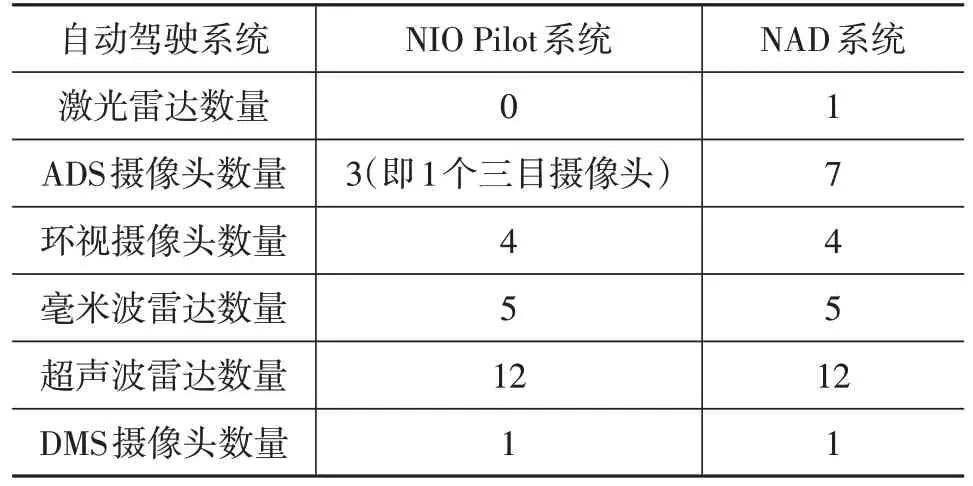
表6 蔚来NIO Pilot系统与NAD系统对比
为使自动驾驶系统能够应对外部环境的多变性和复杂性,现有的解决方案主要在硬件层面进行堆叠,通过添加冗余的传感器确保对场景进行完整复现。如上文所述,特斯拉、蔚来等整车制造商均采用了比普通ADAS 系统更多的摄像头进行环境感知,其主要目的是保证无死角地采集数据,全方位还原交通场景。但与此同时,这些冗余的高精度传感器也产生了更多高噪声、低质量的数据,为后续的数据存储及处理带来了挑战。
2.2 驾驶行为数据采集
驾驶行为数据包括车辆在行驶过程中的各项状态参数和驾驶员的操作行为,这些驾驶行为数据在算法的验证和测试阶段可发挥重要作用。例如,当同向车道车辆意图换道时,由于环境中的强光或对方驾驶员不开启转向灯,导致外部环境感知的结果是同向车辆在正常直行,智能驾驶算法可能对此作出误判。但是,如果有人类驾驶员介入车辆换道场景,通过采集人类驾驶员的驾驶行为数据,即可用人类驾驶员的操作行为数据和算法模拟出的操作行为数据进行对比,进而验证算法的合理性并进一步优化算法。
驾驶行为数据采集系统可分为基于移动设备的驾驶行为数据采集系统和基于车载设备的驾驶行为数据采集系统[37]。当下广泛使用的智能手机均安装有高精度运动传感器和全球定位系统,充分利用这些已有传感器可以大幅降低数据采集的成本,并能获取大量较高精度的车辆位置、速度和加速度等信息[38-40]。使用车载设备采集驾驶行为数据,可以获取种类更多的数据,如驾驶员眼动信息、心电信息和环境视频信息等,车载设备同时兼具采样频率高、测量误差低等优点[41-43]。
目前已公开的驾驶行为数据集有2 个[44]:州立农业公司分心驾驶员数据集(State Farm’s Distracted Driver Dataset)和开罗美国大学分心驾驶员(AUC Distracted Driver)数据集。前者[45]是一个关于驾驶姿势分类的数据集(用以检测驾驶员的驾驶行为),由State Farm 公司发布,通过将2D 摄像机固定在乘员头顶的扶手上进行数据采集,分类好的图像数量高达22 424 张;后者[46]是开罗美国大学仿照前者所创建的,主要收集驾驶员分心时的驾驶动作,通过华硕ZenPhone(型号Z00UD)手机进行数据收集,目前共包含17 307张图像。
除上述2种公开的驾驶行为数据集外,国内的东南大学也建立了类似的数据集[47],不过只包含了4类驾驶动作,普遍性较低且尚未公开。
2.2.1 基于车载设备的驾驶行为数据感知
基于车载设备的驾驶行为数据感知过程是指在某一时间段内,车载传感器对车辆自身的状态进行感知,然后数据采集系统进行数据采集[48],这些数据包括但不限于行驶过程中车辆的加速度、轮毂转动的角速度、油箱液位等车辆最基本的信息,反映了车辆在当前工况下的基本状态。同时,这些信息也可以反映驾驶员的驾驶行为和习惯,例如,通过一段时间内的车速变化可以推测驾驶员的驾驶行为是激进还是保守。
车载环境感知传感器系统主要分布于汽车的动力总成、底盘和车身。其中,车身传感器覆盖范围很广,任何不应用在动力总成和底盘上的传感器都可归类为车身传感器[49]。相较于激光雷达、毫米波雷达、超声波雷达等较为精确的新型传感器[50],动力总成、底盘和车身传感器则可视为传统传感器,相应分类与工作原理如表7所示。

表7 传统传感器种类及应用原理
传感器收集车身数据后发送给电控系统,电控系统对数据进行处理,最终实现对驾驶员驾驶信息的完整收集。
基于车载设备的驾驶行为数据获取主要流程如图6所示:驾驶员的驾驶行为被车载传感器感知;数据采集系统记录传感器采集到的数据。由于初始数据量庞大,数据采集系统往往需要对采集到的冗余数据进行删除,保留可用的数据供自动驾驶算法或研究人员使用[51]。

图6 驾驶行为数据获取流程
为研究驾驶员的行为中与碰撞风险相关的因素,弗吉尼亚理工运输研究所(Virginia Tech Transportation Institute,VTTI)为其试验车辆配备摄像头、雷达等传感器来自动和连续地收集驾驶参数,包括速度、碰撞时间、位置、加速度和眼睛瞥视行为。在自然驾驶研究领域,Lee 等为了研究青少年新手驾驶员和成年有经验的驾驶员的驾驶碰撞事故率,在车辆上装配了数据采集系统(Data Acquisition System,DAS),采集驾驶员驾驶过程中的视频和运动传感器的数据[52]。
2.2.2 基于移动设备的驾驶行为数据感知
基于移动设备的驾驶行为感知主要是利用手机等智能移动设备自带的传感器实现对驾驶员驾驶行为信息的采集。该类设备通过GPS模块采集驾驶行为数据,并通过网络上传到云端。此类数据采集方式速度快、频率高、参与人员广泛。
目前可利用的移动设备传感器分为2类。第1类是大多数智能手机中自带的运动传感器,包括利用加速度计测量汽车速度或加速度来记录汽车纵向行驶的数据、利用陀螺仪测量汽车角速度来记录汽车横向行驶的数据,或者利用磁力计(如指南针)分辨汽车行驶方向与确定驾驶路况,相应流程如图7所示。
图7 手机数据收集处理方案
第2类是位置传感器,如常用于室外环境的GPS和其他基于网络的位置服务,利用车载GPS接收机或手机自带的位置服务模块获取车辆的轨迹信息,进而计算车辆的行驶速度、加速度和转弯信息等[53]。这些传感器与自动驾驶系统相互配合,对驾驶行为数据进行分析收集,得益于相应的传感器与GPS 定位功能,智能手机已成为收集和处理汽车移动感知数据的有效工具。
但利用智能手机进行驾驶行为数据的收集也有十分明显的缺点:首先,大多数智能手机中自带的运动传感器精度较低,所以收集的数据噪声较大;其次,参与数据收集的人员十分广泛,存在驾驶人员职业与习惯多样性的问题,数据总体的不确定性较强[54],数据量也十分庞大且冗杂。因此,如何有效处理采集的车载传感器数据将成为基于移动设备的驾驶行为数据采集技术开发的关键。
3 自动驾驶数据记录系统
随着自动驾驶技术的不断发展,车辆上所搭载的各种传感器、控制设备与感知设备的数量愈发庞大,自动驾驶的软件愈加复杂化,事故分析所需数据越来越多。此时,先进的自动驾驶数据记录与存储技术显得极为重要。数据记录系统可以帮助进行数据重建,这些数据不但能作为还原事故现场的依据,还能为自动驾驶系统的升级提供数据支撑[55-57]。
3.1 汽车事件数据记录系统
汽车EDR系统是由1个或多个车载电子模块构成,具有监测、采集并记录碰撞事件发生前、发生时和发生后车辆和乘员保护系统的数据功能的装置或系统[58]。
EDR 系统一般会记录如下信息:碰撞发生前汽车的动力学数据和系统的状态信息;驾驶人输入信息;碰撞发生信息;乘员约束装置使用/关闭状态信息;碰撞后数据,如碰撞自动求助(Automatic Collision Notification,ACN)系统启用及工作情况的信息[59]。多数情况下,在事故发生时,EDR 系统都会触发并对数据进行记录和储存。事故发生后,对EDR 系统数据进行提取[60],通过客观证据分析事故的成因,判定责任[61]。
在EDR 系统研究方面,20 世纪70 年代,美国已经开发出了EDR系统的相关产品,并在2006年颁布法规,规范了汽车碰撞事件记录的内容和读取方法。美国国家道路交通安全管理局要求,自2014年9月后,美国境内所有销售的车辆都需要配备EDR 系统。在日本,目前已经形成EDR 系统的行业标准,但并未强制实施。在欧洲,目前还没有统一的EDR系统标准及法规,但大多数车辆已经具备EDR功能。我国之前在EDR系统标准的研究与制定领域存在空白,为加强对汽车事件的成因分析及取证,建立完整、可信的车辆事件数据记录系统,工业和信息化部组织行业机构、重点企业等研究开展了《汽车事件数据记录系统》强制性国家标准的制定,并于2022年1月1日正式实施[62]。
该标准提出了“碰撞事件触发阈值”的概念,即当车辆达到以下触发阈值条件时,该事件才应被记录[63]:
a.当车辆仅记录“纵向delta-V”时,触发阈值为在X轴方向上150 ms时间区间内不小于8 km/h的车辆速度变化。
b.当车辆同时记录“横向delta-V”时,触发阈值为在X轴方向或者Y轴方向上150 ms 时间区间内不小于8 km/h的车辆速度变化。
其中,“delta-V”表示速度变化量,即碰撞前车速与碰撞后车速的矢量差:
式中:v1为碰撞前车速,v0为碰撞后车速。
对于以上2 种情况,如果事件持续时间小于150 ms,那么车辆速度的变化等于或者超过8 km/h 时,该事件也应被记录。
EDR系统通过CAN总线对车辆运行数据进行连续监控,当车辆在一定时间内纵向或横向速度变化量达到阈值时,EDR 系统便储存碰撞前至碰撞后共计几秒内的车速、发动机转速、制动踏板开关状态、纵向加速度、转向盘转角、安全带使用情况等数据。当车辆的被动安全装置如安全气囊起爆时,储存的数据将被锁定,不可更改。若被动安全装置未起爆,EDR 系统储存的数据可能随车辆的后续运行而被其他事件覆盖[64-66]。
近几年,随着EDR系统的部署,研究人员在此基础上研发了一种自动驾驶汽车事件数据记录(Autopilot Data Recorder,ADR)系统。ADR 系统由ADR 设备、车载以太网网关、车载网联终端、视频记录设备及云平台5 个部分组成,能自动侦听和采集自动驾驶控制器(Autopilot Control Unit,ACU)发来的自动驾驶系统数据并将不同数据写入各自的文件缓存中。其中,事件信号由自动驾驶系统的决策程序进行判断和提供,数据处理流程如下:
a.当接收到事件信号时,ADR 设备将通过音频视频桥(Audio Video Bridge,AVB)协议向网联终端和视频记录设备发送事件通知,并将发生时刻前90 s和后30 s的数据进行锁定保护。
b.ADR 设备和视频记录设备通过文件传输协议(File Transfer Protocol,FTP)将该时间段内采集的自动驾驶系统数据和车辆视频数据上传至网联终端,最终由网联终端上传至云平台[67-68]。
3.2 自动驾驶数据记录系统
自动驾驶车辆投入市场前,必须解决如何准确获取自动驾驶过程的相关信息并利用这些信息对事故进行重建的问题。自2021 年起,国内外整车制造商正在陆续实现L3 级别自动驾驶车辆的量产。而L3 级别自动驾驶车辆在使用过程中存在的人机共驾行为会使交通事故责任主体的判定变得模糊,给法律责任界定带来较大困难。因此,用于获取自动驾驶过程信息的自动驾驶数据记录系统(Data Storage System for Automobile Driving,DSSAD)的研究显得极为重要[69-72]。
DSSAD可以视为自动驾驶的“黑匣子”[73],用于记录L3 级别及以上自动驾驶车辆在达到触发条件时刻前、中、后特定时间段车辆、驾驶自动化系统、行车环境及驾驶员数据信息,以此确定在不同时间、地点,控制车辆的是驾驶员或是自动驾驶系统。
根据数据记录装置的集成方式,DSSAD 可分为2种[74]:
a.通过单独的数据记录装置对关键信息数据进行记录。首先,DSSAD实时读取车辆的各项数据,如车辆的运行状态(转向盘转角、车速、加速度、制动力等)、车辆周围的环境信息、驾驶员的行为信息等;之后,系统通过DSSAD 控制器内规划的事件逻辑进行实时监测,当检测到的数据达到系统阈值时,DSSAD 控制器自动触发记录,并将关键信息储存在DSSAD 内部的存储单元中。值得注意的是,由于该类系统使用单独的数据记录装置,存储容量有限,系统将会按照数据的优先级覆盖过去的数据。存储具体流程如图8所示。
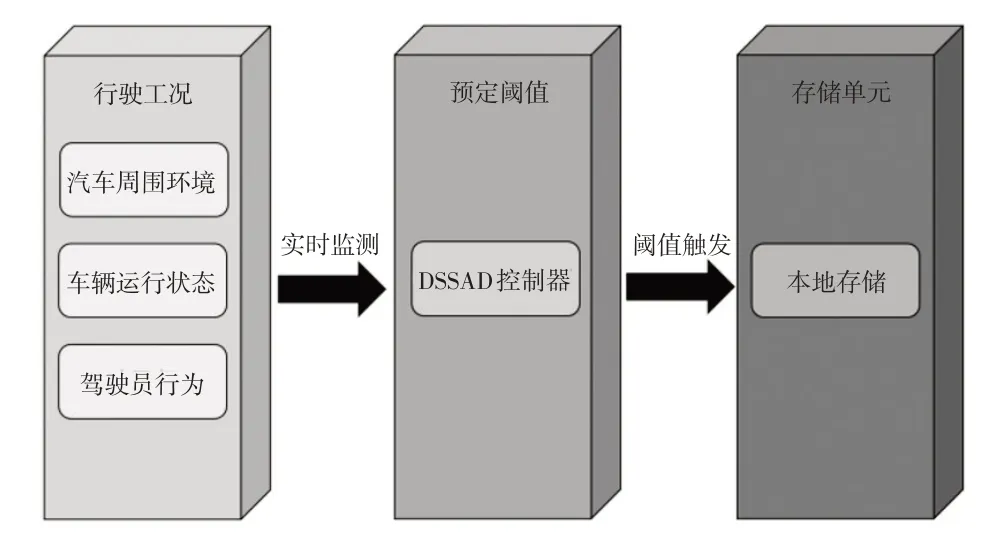
图8 具有单独数据记录装置的DSSAD数据记录流程
b.将数据记录模块集成在域控制器中。该类DSSAD通过将数据记录模块集成在域控制器中实现与各控制器的通信,对感知、决策、控制信号进行储存。DSSAD 控制器集成在自动驾驶中央控制器内部,并与其他控制器通过总线进行连接通信,系统根据事先规划的事件逻辑进行实时监测,当满足触发条件时进行逻辑触发,并通过总线向各控制器发送数据记录锁存信号。各控制器在接收到此信号后根据设计要求记录关键数据信息。与第1种方式相比,该方法更加高效,所储存的数据更加完整,但相应地失去了其独立性,与其他控制器关联性较强。一旦其他控制器存在故障或数据传输异常,会严重影响其功能。其具体实现原理如图9所示。
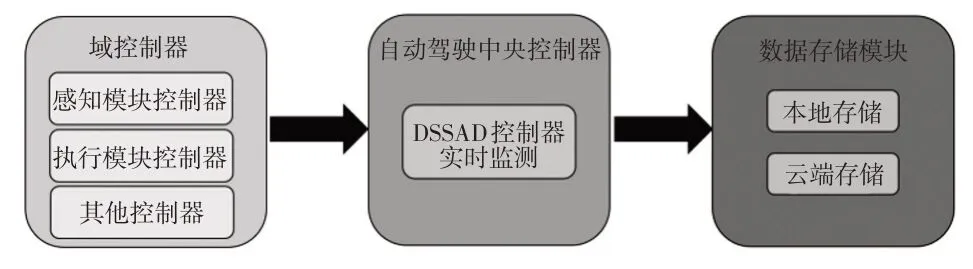
图9 中央控制器集成DSSAD数据记录流程
EDR 系统与DSSAD 的数据存储包括本地存储和云端存储,其中EDR 系统要求存储一个事故中前90 s与后30 s 的数据,存储容量不少于3 次连续碰撞事故的数据大小。而DASSD 则要求记录每一次事故中驾驶员与自动驾驶系统之间决策对象的转换情况,存储容量要求在6 个月内至少存储2 500 次相应事故的数据。根据Insup Kim 等的研究,EDR 系统与DASSD 的云端数据存储量可根据其本身需要数据量的大小、触发数据采集的次数以及数据保存的周期计算。而本地存储量可以通过传感器数据的带宽以及过程中所需的传感器数量来计算。如果EDR 系统与DSSAD 在存储数据时尽可能地节省传感器的使用,则其存储的数据如表8所示。
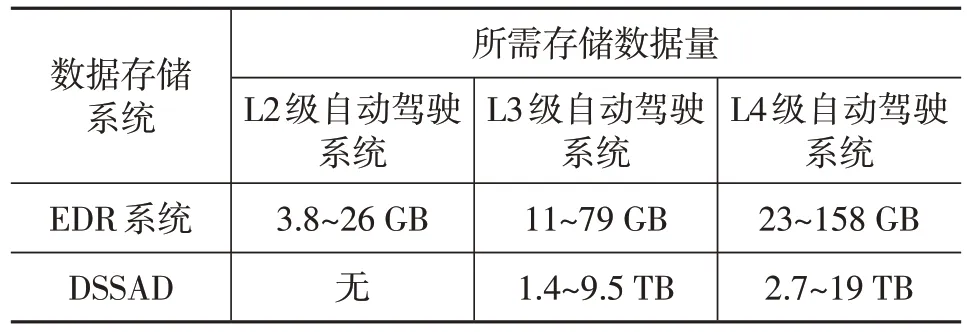
表8 EDR系统与DSSAD所需存储数据量
EDR系统和DASSD的不同点主要在于系统设计目的、搭载车辆、数据可用性以及系统任务4个方面。
在系统设计目的方面:EDR 系统侧重于发生碰撞时的相关数据,一方面可用于确认事故发生的原因,另一方面可以借此改善车辆的安全系统;DSSAD 侧重于记录L3 级别及以上车辆在自动驾驶过程中,在达到触发条件前、中、后自动驾驶系统、行车环境以及驾驶人员等数据信息。事故发生时,自动驾驶车辆可能会成为责任主体[75],所以要确定在不同时间、地点,控制车辆的是驾驶员还是自动驾驶系统,以厘清责任[76-78]。
在搭载车辆方面:EDR 系统用于所有车辆,包括乘用车、轻型货车及重型货车,而DSSAD则适用于配备了L3、L4 级自动驾驶功能的车辆。可以预见,未来在L3及更高级别的自动驾驶车辆中,EDR 系统与DSSAD 的共同使用将成为一大趋势。
在数据可用性方面:EDR 系统主要记录碰撞等较为严重的事故(如安全气囊启动、翻车)的相应数据,且数据在被提取前一直可用,而DSSAD触发的阈值更低,且至少可用6个月。
在系统任务方面:EDR 系统提供碰撞前、后小片刻时间的简单数据,DSSAD 侧重于记录驾驶员及自动驾驶系统对车辆驾驶权转移的分析,并对车辆周围的环境数据进行记录。
3.3 一般L3级别车辆数据存储方法
L3级自动驾驶车辆的数据记录与存储主要服务于自动泊车(Autonomous Valet Parking,AVP)场景、高速代驾(High Way Pilot,HWP)场景、交通拥堵导航(Traffic Jam Pilot,TJP)场景、自动紧急制动(Automatic Emergency Braking,AEB)场景,自动驾驶数据存储内容如表9所示。
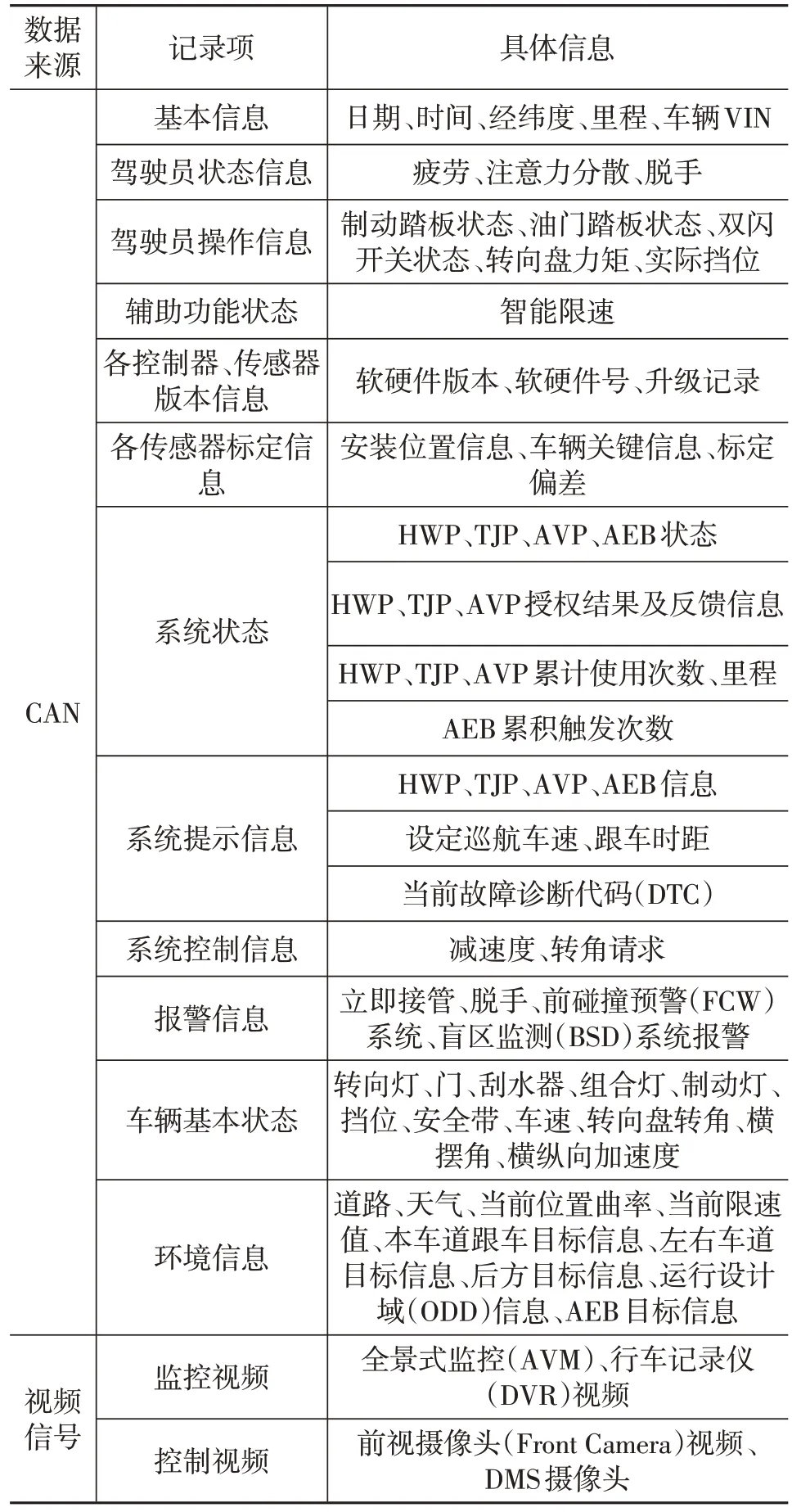
表9 自动驾驶数据存储内容
数据记录系统伴随着自动驾驶系统功能的开启而触发,但不一定是激活状态,如果本地存储空间充足,则利用本地存储空间进行存储,否则告知后台启动无线网络存储,要求在网络空闲时将记录的数据上传到指定的云端,同时支持收到远程发送的请求后上传(每类事件每次数据单独区分),便于及时读取、分析。数据上传可由车载主机(Head Unit,HU)通过车载通信终端(Telematics BOX,T-BOX)或控制器自行上传。各存储单元存储内容如表10所示。数据记录的具体操作过程如下:当车辆起动时,数据记录系统进行自检及初始化,无故障时发送相关的信息至自动驾驶系统,系统接收到该信息后,由驾驶员进行激活操作,此时数据记录系统进入可激活待机状态。进而,一般有2种典型的触发方式可激活数据记录系统:
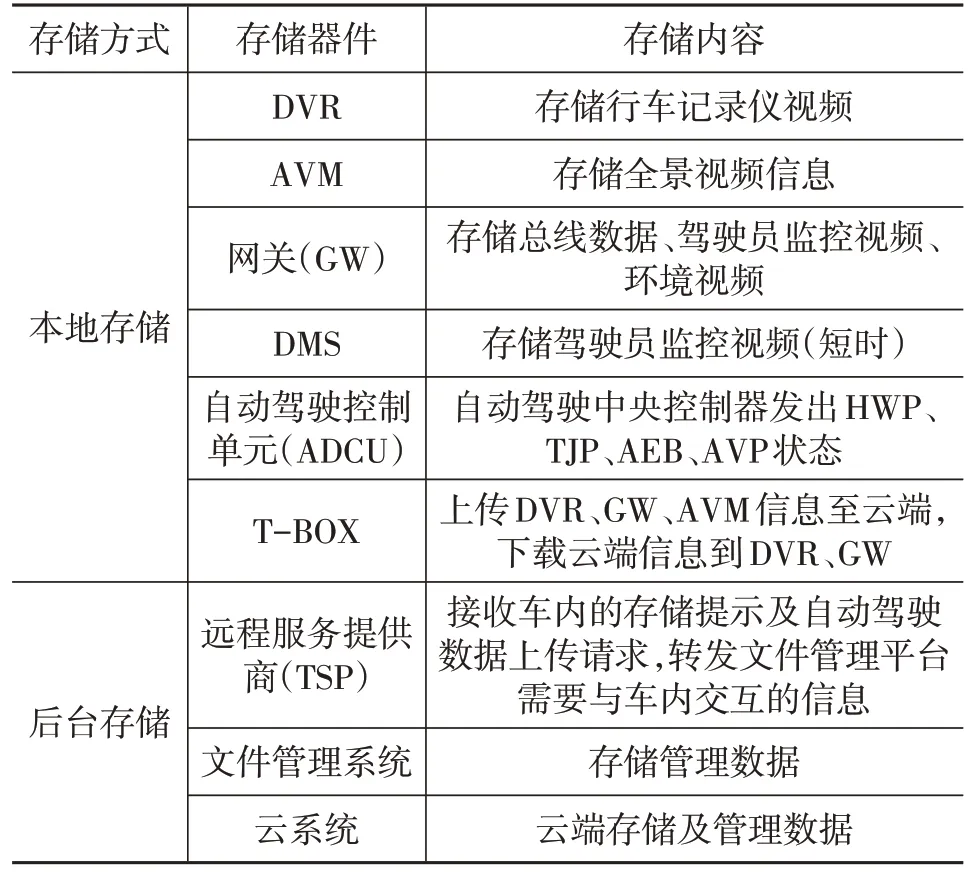
表10 各存储单元存储内容
a.当L3 级自动驾驶系统正常工作时,会发送相应的功能标志位给数据记录系统,自动驾驶系统的功能状态标志包括激活、退出、超越、接管以及紧急制动等,随后数据记录系统随时进行监控,并根据相关数据信号发起记录过程。当数据记录系统有故障时,则需要将故障状态发送给L3 级自动驾驶系统知晓,为了规避无数据记录驾驶车辆的情况,系统此时将不能进入自动驾驶激活状态。
b.当L3 级自动驾驶系统工作异常时,各记录终端自动开始记录,记录内容一般包括当前时间节点前一定时间(一般设置为20 s)内系统相关内容状态,此时从触发记录开始计时,当触发时间大于一定值,如10 s 后系统仍不能恢复时,则退出此次记录过程,并将数据上传至后台。
上述2种情况可能存在交叉,比如TJP或HWP系统正常工作时,系统检测到记录事件发出数据记录请求,但是在发送请求到系统响应期间,若数据记录系统检测到L3 系统异常,则数据记录终端应保持记录前一个异常事件,同时待记录完成后判断当前系统状态是否恢复正常,若未恢复,则从此时开始向前瞬移一定时间进行系统状态记录,同时向后顺延一定时间结束记录过程。当触发多个事件记录时,则需按照事件触发的时间先后及紧急状态自动进行归类存储。
数据记录过程完成后,需要根据系统的存储空间进行上传存储,具体过程包括本地存储空间检测与上传确认:
a.本地存储空间检测。当检测到DVR、GW、AVM存储空间将满时,则发出相应的提示信息。自动驾驶数据与T-BOX 建立通信,将相应的记录数据上传至TBOX,当T-BOX 也存储满时,则进行实际状态转发,并将相应的数据通过TSP上传到云端。
b.上传确认。DVR、网关、AVM上传时需要支持断点续传,无论是由于电源断电还是网络卡顿、中断等,需要保留数据断点信息,以便在系统电力或网络恢复后重新接续上传。同时,本地数据上传完成后,需要定时删除以保持相对应的容量。由于最终记录的数据会上传至云端,其存在一定的数据泄密风险,因此需要对数据信息进行安全保护,可以采用多重加密算法进行数据加密。记录数据的读取方式可通过发送诊断请求形式,通过诊断口或专用接口读取所记录的数据。
随着智能网联技术在汽车行业深入发展、传感器数量与精度的不断提高,不仅是先进的自动驾驶数据采集方法所收集的数据容量在增加,先进的自动驾驶数据存储方法所需处理与存储的数据也在增多。按照当前行业内较为先进的汽车数据采集设备估算,一辆自动驾驶汽车每小时采集的数据量可达1 TB。假定按照每天采集里程500 km,每天采集时长16 h(白天和夜晚各8 h)进行测算,那么,单辆汽车在一个200天的测试周期中,数据采集量将高达3.2 PB。这些海量数据中含有大量相似或重复数据,特征性不足,甚至是含有噪声的低质量数据,给自动驾驶系统测试与验证过程带来复杂的问题和巨大的工作量,为系统性能的优化带来了新的阻碍,形成了自动驾驶系统的“大数据灾难”[79-81]。
4 特斯拉影子模式
2018 年2 月,特斯拉在递交给加州交通管理局(California Transportation Authority,CTA)的报告中称,该公司在2017年并未在加州州际公路上开展完全自动驾驶路测,但其Autopilot系统却在持续记录车辆真实的驾驶数据。2019 年4 月,特斯拉正式提出“影子模式(Shadow-mode)”的概念,如图10所示。
图10 特斯拉影子模式
影子模式的含义是自动驾驶算法伴随人的驾驶一同运行但不实际控制车辆[82],其目的是希望共享所有特斯拉车辆的驾驶数据,从而代替原本只采集少量特定试验车的测试方案,同时也能改善自动驾驶测试场景过于局限等问题。
影子模式的工作机理是:当自动驾驶算法产生的预期动作指令与真实驾驶员的实际控制指令存在差异时触发系统记录功能开启,系统会计算产生的预期动作指令的实际正确率,针对高错误率的预期动作指令所对应的场景,系统会记录下相应数据用于后续的神经网络训练。也就是说,自动驾驶算法一直在持续模拟决策并且将决策结果与驾驶员的行为进行对比,如果驾驶员的实际驾驶行为与自动驾驶算法输出指令不一致,则触发系统的记录功能。
特斯拉的影子模式将一系列传感器所捕获的数据传回云端用于算法的进一步开发。尽管对于自动驾驶系统算法的开发而言,这样的方法颇为有益,但随之而来的是用户的隐私问题。虽然没有证据表明特斯拉收集的数据超出了该公司服务条款的范围,但公众也并不清楚特斯拉收集了哪些信息以及如何利用这些信息[83]。无论如何,特斯拉影子驾驶系统所提出的一种人机共驾下自动驾驶系统实时运行但不控制车辆的数据记录方法仍值得研究。
5 总结与展望
随着自动驾驶系统技术的升级与车辆自动化程度的提高,如何处理精确传感器产生的大量冗余、低质量数据已成为限制先进的自动驾驶数据采集与存储技术发展的主要问题,成为实现自动驾驶系统在无限场景下的测试与验证的关键。开发出一种能够实时记录行车数据,并同步筛选出少量高质量数据存储用于责任划分与算法升级的数据采集与存储系统,已成为先进自动驾驶数据采集与存储系统的趋势。
猜你喜欢
汽车观察(2022年12期)2023-01-17
消费电子(2022年7期)2022-10-31
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年12期)2022-01-18
车迷(2019年10期)2019-06-24
电子测试(2018年13期)2018-09-26
公民与法治(2016年4期)2016-05-17
人民交通(2016年5期)2016-04-15