多测站测量机器人智能管理系统设计与应用
2024-02-28 18:23:52王华为陈远瞩黄海龙
水利水电快报 2024年1期
王华为 陈远瞩 黄海龙
收稿日期:
2023-05-23
作者简介:
王华为,男,工程师,硕士,主要从事安全监测自动化系统开发与应用研究工作。E-mail:wiy8722423@163.com
引用格式:
王華为,陈远瞩,黄海龙.多测站测量机器人智能管理系统设计与应用
[J].水利水电快报,2024,45(1):109-115.
摘要:
利用测量机器人可实现水利工程建筑物表面变形监测的自动化,掌握大坝、边坡、隧洞等的变形规律、破环机制和影响范围。介绍了测量机器人的测量原理与发展应用,设计了多测站测量机器人智能管理系统,实现了对测量机器人的自动控制、数据处理、状态监控与报表输出,并可兼容极坐标法、交会法、边角网等多种观测方式。同时,系统采用领域驱动设计理念设计系统架构,降低了系统复杂度,提高了系统更新升级速度。将该系统应用于大坝、边坡、隧洞等建筑物的表面变形自动化监测中,结果表明:系统运行情况良好,观测缺失率低,成果精度高,具有准确性、实时性、可靠性的特点。
关键词:
测量机器人; 多测站; 表面变形监测; 智能管理系统; 领域驱动设计
中图法分类号:P258
文献标志码:A
DOI:10.15974/j.cnki.slsdkb.2024.01.019
文章编号:1006-0081(2024)01-0109-07
0 引 言
在水利工程中,大坝、边坡、隧洞等建筑物在荷载的长期作用下以及洪水、地震的恶劣环境因素影响下,结构将逐渐老化、变形,存在发生事故的风险。为了掌握大坝、边坡、隧洞等的变形规律、破环机制和影响范围,并通过变形数据表征和预警其安全状态,需采用一定的监测手段获取准确、即时、可靠的表面变形监测成果。目前,较常用的监测手段包括测量机器人监测、GNSS监测、视准线、三维激光扫描等[1-2]。其中,测量机器人具有自动照准、目标识别、自动跟踪等功能,且具有高精度的测角测距[3],有利于实现高精度表面变形监测自动化测量。
测量机器人的变形监测系统软件开发工作在国内外得到了广泛的重视和研究。梅文胜等[3]研究了一套基于测量机器人有合作目标的变形监测系统,该系统能实现对一台测量机器人的控制和采集,但仅能支持极坐标法观测;蔡乾广[4]研究了一种多测站自动变形监测系统,能够同时控制多台测量机器人,但该系统本质上是通过控制各台测量机器人采用极坐标法各自监测变形体的一部分,再将所有观测数据汇总后统一计算,无法进行平差计算;其他水利工程多采用瑞士徕卡(Leica)的测量机器人和配套的GeoMOS系列软件,其支持多台测量机器人的控制,但只能采用极坐标法观测和解算;其他厂家包括天宝(Trimble)、苏州一光、南方测绘等研发的测量机器人变形监测软件也仅支持极坐标法观测,观测流程不符合中国国家标准,成果精度也难以提升[4]。
在此背景下,建立一套能够控制多台测量机器人同时观测、支持前方交会和边角网等多种观测方式、满足规范测量要求、可以实时准确地监测表面变形情况的系统具有广泛的运用前景,能突破国外厂商的技术壁垒,产生巨大的经济和社会效益。
1 测量机器人测量原理
测量机器人(又称全站仪)是一种内置自动目标识别(Automatic Target Recognition,ATR)功能的高技术测量仪器,能够自动搜索测量目标并测量距离、水平角和垂直角[5]。在变形监测点上一般布设圆棱镜或360°棱镜,测量机器人通过自身坐标与监测点坐标,计算其旋转水平角和垂直角,驱动马达使全站仪精确照准棱镜,然后发射激光由棱镜反射后经过仪器内部的CCD传感器接收、识别,根据反射回光的强度自动确定棱镜中心位置后,即可获取测站与监测点间的距离、水平角、垂直角等数据[6],再根据已知点坐标使用极坐标法[7]、间接平差等算法计算出各监测点的空间坐标。
多台测量机器人可以同时照准同一个监测点,即使用交会法观测。交会法相比于极坐标法,具有多余观测条件,能够使用平差算法来提高成果精度[8-9]。
2 系统设计与实现
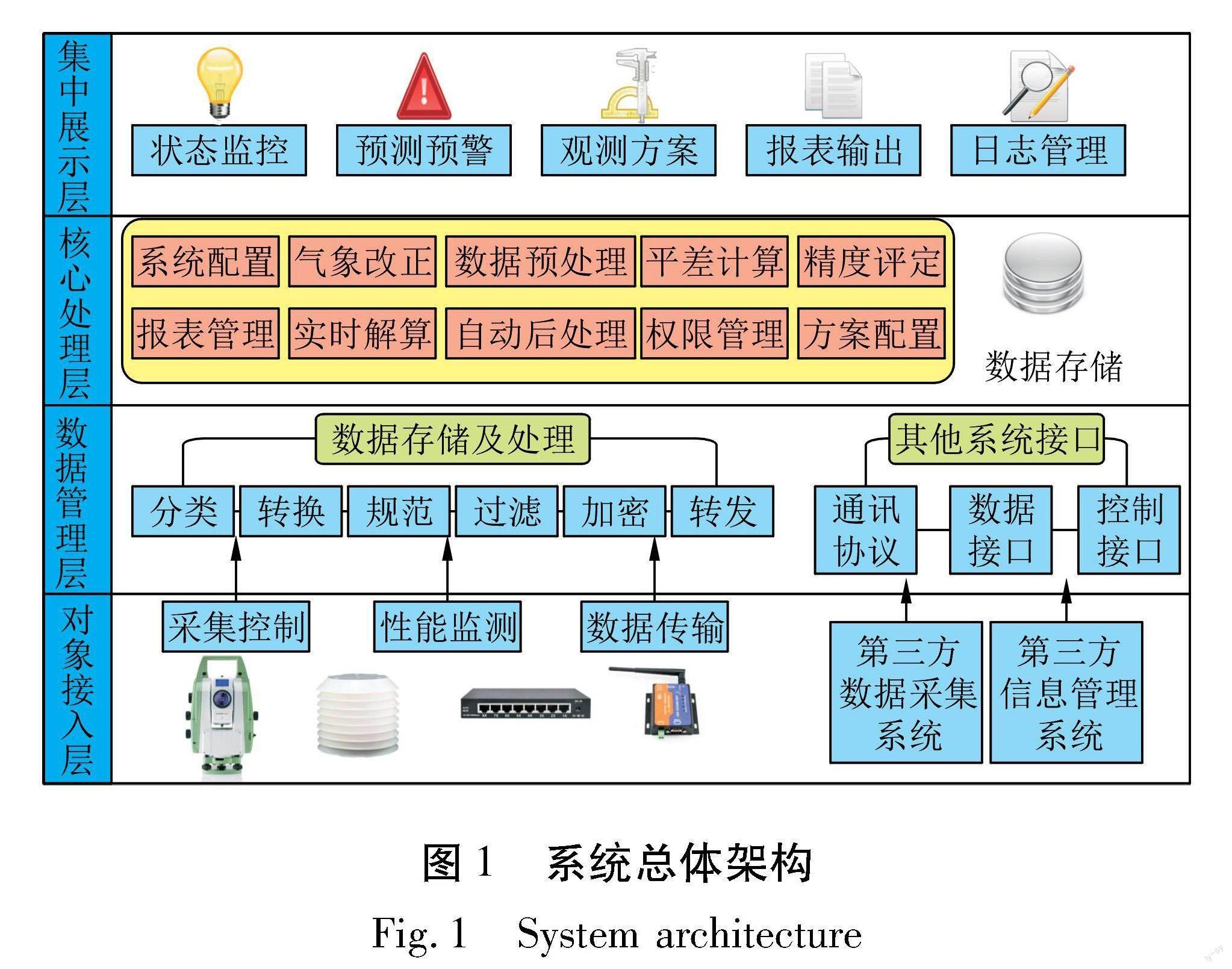
2.1 系统总体架构
系统主要分为对象接入层、数据管理层、核心处理层与集中展示层。对象接入层主要包括多台测量机器人、气象传感器、自动启闭窗等硬件设备;数据管理层用于传输和存储观测数据,并通过数据接口、控制接口与第三方系统进行对接;核心处理层具有方案配置、设备控制、数据处理、精度评定、报表管理等功能;集中展示层主要面向系统用户,可视化展示观测方案、成果数据、报表报告等。系统详细总体架构见图1。
为符合工作基点组网观测和变形测点交会观测的要求,需要在每个设站点上架设测量机器人,并在测量机器人上同轴安装棱镜,同时在每个控制点和变形测点上安装棱镜;对象接入层中所有设备通过光纤、无线网络等连接到监测中心站,监测中心站部署一台工作站,安装变形监测智能管理系统,与对象接入层设备通过TCP/IP协议连接成为一个有机的整体。
2.2 技术路线
该系统是一个基于B/S的Web系统,用户使用浏览器输入IP地址或网址即可访问,具有一次部署、到处访问的优点。系统采用前后端分离的方式开发,前端界面采用Vue.js框架,后端采用.Net Core框架,可以部署在主流的Windows、Linux或国产麒麟操作系统上,并运用EntityFramework持久化技术与数据库无缝连接,支持MSSqlServer、MySql、Oracle等主流数据库。
系统采用“领域驱动设计”(Domain-Driven Design-Tackling Complexity in the Heart of Software)的设计思想,将复杂的业务逻辑抽象为领域模型,确保了业务逻辑的边界,并将其集中在一个模型中,降低了系统复杂度和耦合度,增加了系统的代码可读性与可维护性[10];在系统需求频繁变化时,能够快速对某一业务模块进行最小范围的修改,实现快速响应、快速更新升级的目的。
2.3 系统主要功能
系统主要功能包括基础信息管理、观测方案设置、采集控制、数据处理、数据管理、状态监控、系统管理等。
2.3.1 基础信息管理
基础信息管理模块用于监测点、测站的基础信息配置(图2),以及坐标配置、通讯参数等。基础信息是关系到系统能否正常运行的重要数据,设置坐标可保证测量机器人能够自动照准监测点,部分测站或监测点作为稳定的起算点,其坐标是计算其他监测点坐标的必要条件;通讯参数保证系统能够实时监控测量机器人、气象传感器、自动启闭窗等设备的通讯和工作状态,确保系统正常运行。
2.3.2 观测方案设置
为了能够兼容前方交会、后方交会、边角网等各类观测方法,系统采用观测点组互相组合的方式设置观测方案。一个观测点组包含一个测量机器人、多个监测点与观测方案,可以设置多个点组,实现多台测量机器人同时观测的目的,点组管理界面如图3所示。
为满足SL 52-2015《水利水电工程施工测量规范》、GB/T 16818-2008《短程光电测距规范》等国家标准规范中对边长、水平角、垂直角的测回数和限差要求,观测方案中,还可以按不同的精度等级配置不同的测回数和限差值,如图4所示。
2.3.3 采集控制
瑞士徕卡公司针对该厂生产的TPS、TS、TM等系列测量机器人开发了GeoCOM接口技术。GeoCOM接口技术属于点对点通讯协议,通信时由客户机发送ASCII编码指令,测量机器人接收指令,完成相应动作后返回数据[11]。通过集成GeoCOM接口,系统可实现对测量机器人的通讯、观测、控制、状态监测等功能。GeoCOM接口的几种典型命令如下:
(1) 向特定角度旋转。
发送指令:%R1Q,9027:Hz,V,0,0,0。
返回数据:%R1P,0,0:0。
其中,Hz为水平角,V为天顶距。
(2) 搜索目标。
发送指令:%R1Q,9029:dHz,dV,0。
返回数据:%R1P,0,0:0。
其中,dHz为水平方向搜索区域,dV为垂直方向搜索区域。
(3) 精确照准。
发送指令:%R1Q,9037:dHz,dV,0。
返回数据:%R1P,0,0:0。
其中,dHz为水平方向照准区域,dV为垂直方向照准区域。
(4) 测量距离和角度。
发送指令:%R1Q,17017:2。
返回数据:%R1P,0,0:0,dh,dv,dd。
其中,dh为水平角,dv为天顶距,dd为距离。
(5) 切换盘左盘右。
发送指令:%R1Q,9028:0,0,0。
返回数据:%R1P,0,0:0。
采集控制模块能够按照观测方案设置的观测频次和观测时间进行定时周期观测,观测主要流程如图5所示。观测流程严格按照规范要求,具备多测回重复测量、超限重测等功能。
在发生地震、洪水等情况时,采集控制模块可以控制测量机器人即时加密采集,见图6,并提供对外加密观测API接口,方便第三方平台接入。
2.3.4 数据处理
数据处理包括预处理和平差计算两部分,主要流程如图7所示。数据预处理主要是对观测的原始测值处理,包括对水平角进行测站平差,对边长进行气象改正、归算到标心以及改算为平距等,预处理的质量是决定最终平差精度的最重要因素之一。
预处理结束后,通过极坐标法计算各监测点概略坐标,再分别建立边角误差方程式,利用经典间接平差理论进行平差计算,并计算点位中误差、累积位移等成果,最终将上述原始测值、预处理后测值以及成果保存到数据库中备查。
2.3.5 数据管理
数据管理模块主要用于查询、统计、审核、输出监测测值和成果,并绘制变形过程线图等相关图,也能够按照报告模板自动生成监测成果报告,见图8。
2.3.6 状态监控
测量机器人测站中集成了多种设备,包括测量机器人、气象传感器、监控摄像头、自动启闭窗、新风系统、电子围栏等,状态监控模块能够对各类设备的通讯状态和工作状态进行实时不间断检测,并显示监控摄像头实时监控画面,见图9。系统根据各个测站设备的通讯状态,智能判断网络故障位置,提醒运维人员现场检查。
2.3.7 系统管理
系统管理模块主要用于配置系统各模块权限,查看观测日志、数据处理日志、系统操作日志等,见图10。
3 系统应用
3.1 监测布置
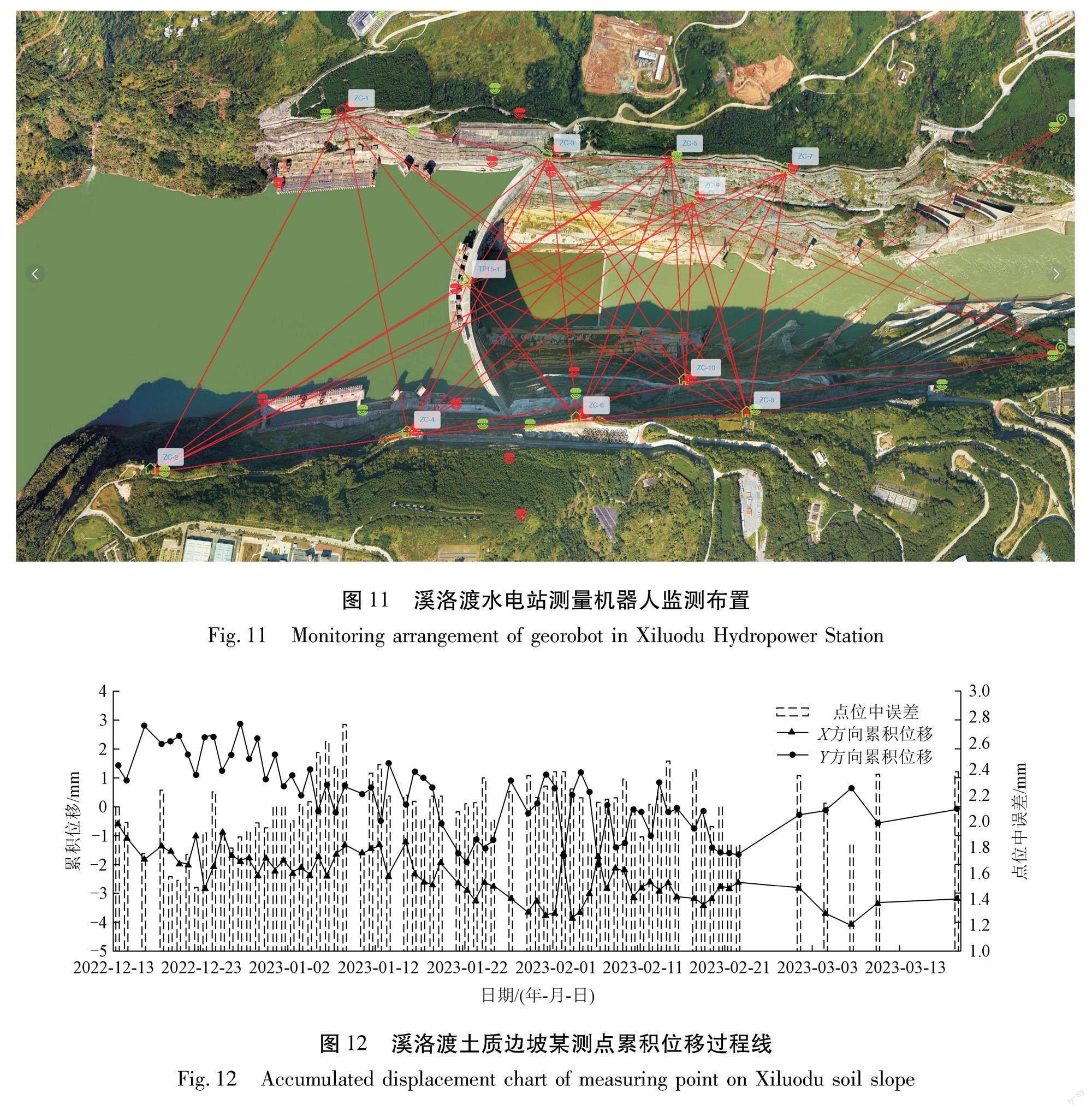
以溪洛渡枢纽区边坡的实际应用为例,在溪洛渡枢纽区边坡两岸共布置10台徕卡TM50测量机器人,如图11所示。由于变形监测区域较大,测站与测点间的边长在600~2 700 m之间,难以在变形区域外选取稳定点作为基准,因此在变形区域内选取3个测点作为起算点,并布置了3套倒垂线装置,用于实时获取坐标变化量。
变形区域内共布置变形监测点140个,其中132个测点能同时被2~4台测量机器人观测,能够使用平差模型计算;另外8个測点仅能被一台测量机器人观测,只能使用极坐标法计算坐标。
3.2 系统运行情况
系统从2021年12月开始运行,共配置基准网观测和变形测点观测两个观测方案。基准网观测方案是由10台测量机器人互相组网观测,通过3个倒垂线测点起算获取10个测站的实时坐标;变形测点观测方案是以10个测站为工作基点,采用前方交会或极坐标法观测140个测点。两个方案观测频次均为每天按一等观测精度测量一次,观测总时长约4 h。截至2023年3月,共获得400多期数据,除极少部分测点因断电、通讯、遮挡、泄洪等原因造成数据缺失率超过5%外,绝大部分测点数据缺失率小于2%。
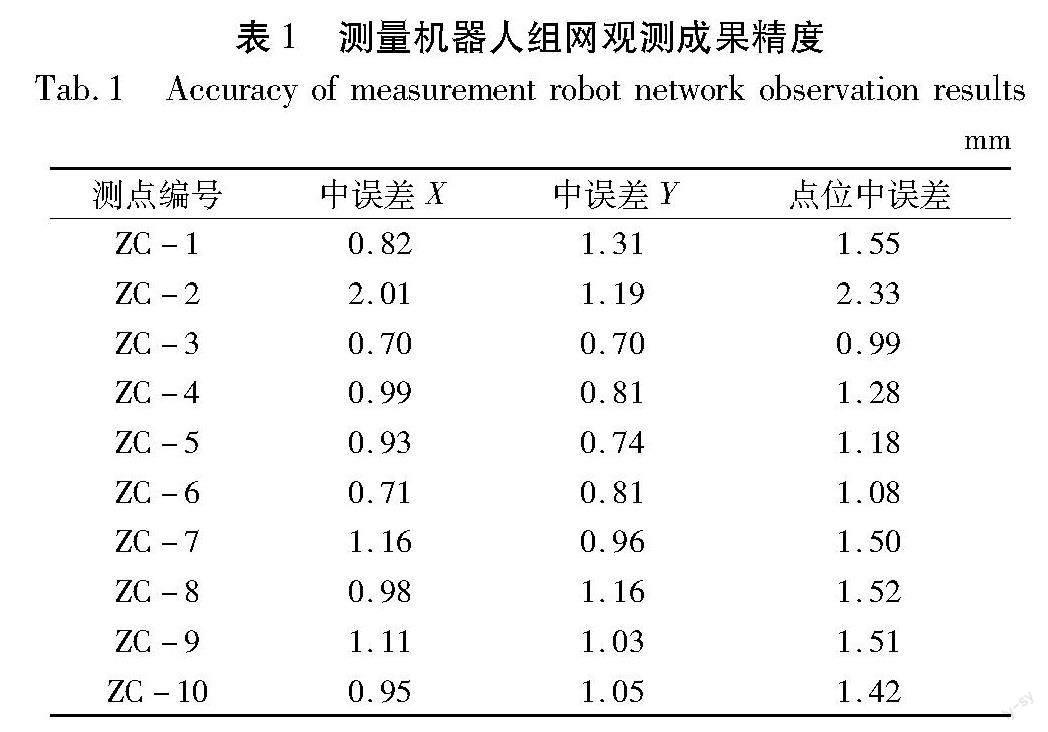
根据已有数据统计,土质边坡测点最大点位中误差±2.88 mm,岩质边坡测点最大点位中误差±1.76 mm,成果精度较为理想,累积变形过程线较为平缓,如图12所示;10台测量机器人组网观测成果点位中误差除ZC-2外均能小于±2 mm,ZC-2测站由于网形较差,其点位中误差略大于±2 mm(表1),可满足枢纽区边坡变形监测的要求。
4 结 语
多测站测量机器人智能管理系统集成了GeoCOM接口,实现了对多台测量机器人的控制,观测流程完全满足规范要求,能够满足4 km2范围内变形区域的自动监测,其主要优点如下。
(1) 创新性。相比于其他同类软件,采用B/S架构开发,能够按照规范要求的流程和限差进行观测,支持极坐标法、交会法等各种观测方法,支持平差计算处理。
(2) 可扩展性。采用“领域驱动设计”方法和前后端分离的方式搭建系统架构,系统各模块间具有低耦合性,后台采用标准API接口,可扩展性高,在需求频繁变化时能快速迭代、更新升级。
(3) 智能化。本系统实现了测量机器人的自动控制、数据传输、数据处理、数据存储、数据展示等全链条管理,减少了人为干预出错的可能性,提高了观测效率和自动化水平,节约了大量人工观测成本,同时突破了国外软件的技术壁垒,产生了巨大的经济效益和社会效益。
参考文献:
[1] 李建川,张宇,史波.高边坡变形监测电磁波测距边长气象改正方法[J].人民长江,2018,49(4):56-60.
[2] 罗兴,吴士夫,戴永洪.多种测量方法在山洪灾害调查测量中的协同应用[J].水利水電快报,2016,37(7):49-51.
[3] 梅文胜,张正禄,郭际明,等.测量机器人变形监测系统软件研究[J].武汉大学学报(信息科学版),2002,27(2):165-171.
[4] 蔡乾广.多测站自动变形监测系统研发[D].青岛:山东科技大学,2007.
[5] 渠守尚,马勇.测量机器人在小浪底大坝外部变形监测中的应用[J].测绘通报,2001(4):35-37.
[6] 郭际明,梅文胜,张正禄,等.测量机器人系统构成与精度研究[J].武汉大学学报(信息科学版),2000,25(5):421-425.
[7] 杨明化,汪少青,高全.基于双测量机器人的土石坝表面变形自动化监测技术研究[J].水利水电快报,2019,40(12):46-49.
[8] 龙华伟,翟超.空间前方交会法及其在测试技术中的应用[J].计测技术,2005,25(6):51-54.
[9] 刘大伟,吴敬文,盛青.自由设站法在水工建筑物变形监测中的应用与分析[J].水利水电快报,2019,40(10):34-37.
[10] 李引,袁峰.基于领域驱动设计的应用系统模型[J].计算机工程与应用,2013,49(16):1-8.
[11] 陈磊,尹燕运.基于TS30测量机器人自动化变形监测系统的开发与应用[J].岩土工程技术,2016(3):109-112,128.
(编辑:唐湘茜,张 爽)
Design and application of georobot intelligent management system for multi-station
WANG Huawei1,CHEN Yuanzhu1,HUANG Hailong2
(1.Changjiang Special Information Technology Engineering Co.,Ltd.,Wuhan 430010,China; 2.China Three Gorges Construction Engineering Corporation,Beijing 101199,China)
Abstract:
With the technology of georobots,the automation of surface deformation monitoring,grasping the deformation laws,damage mechanisms and influence ranges of dams,slopes,tunnels,etc was achieved.The measurement principles and development applications of measurement robots were introduced,and a multi- station measurement robot intelligent management system was designed,which achieved automatic control,data processing,status monitoring,report output,and could compatible with various observation methods such as polar coordinate method,intersection method,and triangulateration network method.At the same time,the system adopted a domain-driven design concept to design the system architecture,reducing system complexity and improving system update and upgrade speed.The system was applicated in the automatic monitoring of surface deformation in buildings such as dams,slopes,and tunnels.The results showed that it operated well with low observation missing rates and high accuracy of results and had a high accuracy,real-time performance and reliability.
Key words:
georobot; multi-station; surface deformation monitoring; intelligent management system; domain-driven design
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
煤气与热力(2022年4期)2022-05-23 12:44:56
水利水电科技进展(2021年6期)2022-01-07 02:58:02
河北理科教学研究(2020年1期)2020-07-24 08:14:26
水电站设计(2020年4期)2020-07-16 08:23:48
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
中学数学研究(广东)(2018年23期)2018-03-05 07:54:34
高中生·天天向上(2016年8期)2016-11-22 09:22:46
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55