长江行蓄洪空间数字孪生实景三维模型构建研究
2024-02-28 18:11:04王锴华甘拯石娟娟
水利水电快报 2024年1期
王锴华 甘拯 石娟娟
收稿日期:
2023-05-18
作者简介:
王锴华,男,工程师,主要从事水利工程测绘及信息化相关工作。E-mail:wkh651010@126.com
引用格式:
王锴华,甘拯,石娟娟.长江行蓄洪空间数字孪生实景三维模型构建研究
[J].水利水电快报,2024,45(1):89-94.
摘要:
数字孪生是流域数字化转型的重要技术手段,为有力支撑数字流域孪生中数据底板的构建,以长江中下游三洲联垸行蓄洪空间为研究对象,利用飞马无人机D200获取测区五视角影像,基于Context Capture软件全自动构建实景三维模型,并利用野外量测的检查点对模型精度进行评定。研究表明:基于倾斜摄影构建的实景三维模型平面误差和高程误差分别为0.104 m和0.121 m,均在3个像素以内,满足1∶500比例尺测图要求。基于高精度实景三维模型构建的三维数字场景,可为行蓄洪空间在实时调度模拟分析中的运用提供参考。
关键词:
实景三维模型; 数字孪生; 倾斜摄影; 行蓄洪空间
中图法分类号:P231
文献标志码:A
DOI:10.15974/j.cnki.slsdkb.2024.01.016
文章编号:1006-0081(2024)01-0089-06
0 引 言
数字孪生水利作为水利建设的一种新理念、新模式,是流域数字化转型的重要支撑技术。数字孪生流域需要构建数据底座,以时空大数据为基础,汇集不同领域的业务数据、传感器实时监测数据,结合5G、物联网等新一代信息通讯技术,形成集信息采集、记录、决策于一体的循环数据流。数据底座按照不同尺度分为流域层面数据底座、河段层面数据底座以及行蓄洪空间层面数据底座。其中,行蓄洪空间层面属于精细尺度。空间数据底座以行蓄洪空间精细化三维地形图为本底,对行蓄洪空间分洪工程、围堤、隔堤、安全台等重要防洪工程进行三维数字化建模[1]。然而,水利工程周边地形一般较为复杂,采用传统的测量手段或人工三维建模均难以在效率和精度上满足要求。倾斜摄影三维建模能够通过无接触方式采集数据,以全自动方式获取项目区域目标地物的实景三维模型,是三维数字建模的主要技术手段,也将成为长江中下游行蓄洪空间数字孪生应用的必然趋势。
当前三维建模的技术主要分为3种:人工建模,倾斜摄影建模和激光雷达建模。人工建模制作周期较长,与真实世界反差大;激光雷达建模领域,已有大量的研究利用激光雷达技术进行三维重建,但该方法效率相对较低,需采集影像单独进行纹理贴面[2]。倾斜摄影三维建模在目前测绘领域研究较多,基于倾斜摄影的建模技术已较为成熟,可通过全自动的方式高效获取大范围准确的三角网模型[3]。倾斜摄影三维建模的精度主要与两方面因素有关:① 获取数据的传感器精度;② 后处理软件的技术,尤其是空中三角测量的算法模型。
本文利用无人机获取长江中下游三洲联垸行蓄洪空间的五视角影像,并基于倾斜影像在Context Capture软件中全自动构建实景三维模型,对最终实景三维模型的精度进行评定。
1 倾斜摄影三维建模原理
倾斜摄影测量通过一次航飞即可获取五视角影像,同时利用航空摄影测量理论解算影像的外方位元素,获得影像的位置姿态参数,并进一步将其映射到数字表面模型上作为模型纹理[4]。倾斜三维建模的特点是纹理真实,可高精度获取物方纹理信息,通过先进的定位、融合、建模等技术,生成实景三维模型。倾斜摄影测量是区别于传统航空摄影测量的多视角、大倾斜航空摄影[5],克服传统人工建模周期长、成本高、纹理失真、模型精度低、缺乏地理信息等缺点。倾斜摄影拍摄出的影像色彩和形状可实现全要素还原。利用倾斜摄影方法可以从影像上获取地面上真实的长宽高等,比传统影像拥有更高的真实性[6]。
随着近些年无人机技术的快速发展,行业所用无人机朝着小型化、智能化、集成化方向发展[7]。无人机搭载五视角镜头倾斜航飞属低空飞行,相对于载人大飞机航空摄影测量,能够基于短焦距镜头获取高分辨率影像,一定程度上保证纹理更为清晰。
2 实例分析
2.1 倾斜影像获取
研究区域位于长江中下游,测区分布在长江沿线。测量区域除长江沿线的堤防、民垸,还有枢纽建筑物如土坝、溢洪道、泄洪洞等。堤防、民垸和樞纽建筑物是倾斜摄影三维建模重点,为长行蓄洪空间数字孪生提供基础数据。倾斜航摄采用飞马D200,配备5个Sony ILCE-6000型数码相机,其中1个为焦距25 mm的垂直镜头,另外4个为焦距35 mm的倾斜镜头。整个项目采集30个架次共3万多张影像,分辨率为5 cm左右。根据测区资料和Google earth底图,利用无人机管家航线设计软件规划航线,快速准确生成覆盖测区范围的曝光点坐标,为飞行管理定点曝光提供基础数据,助力测区数据快速有效获取。
2.2 控制点采集
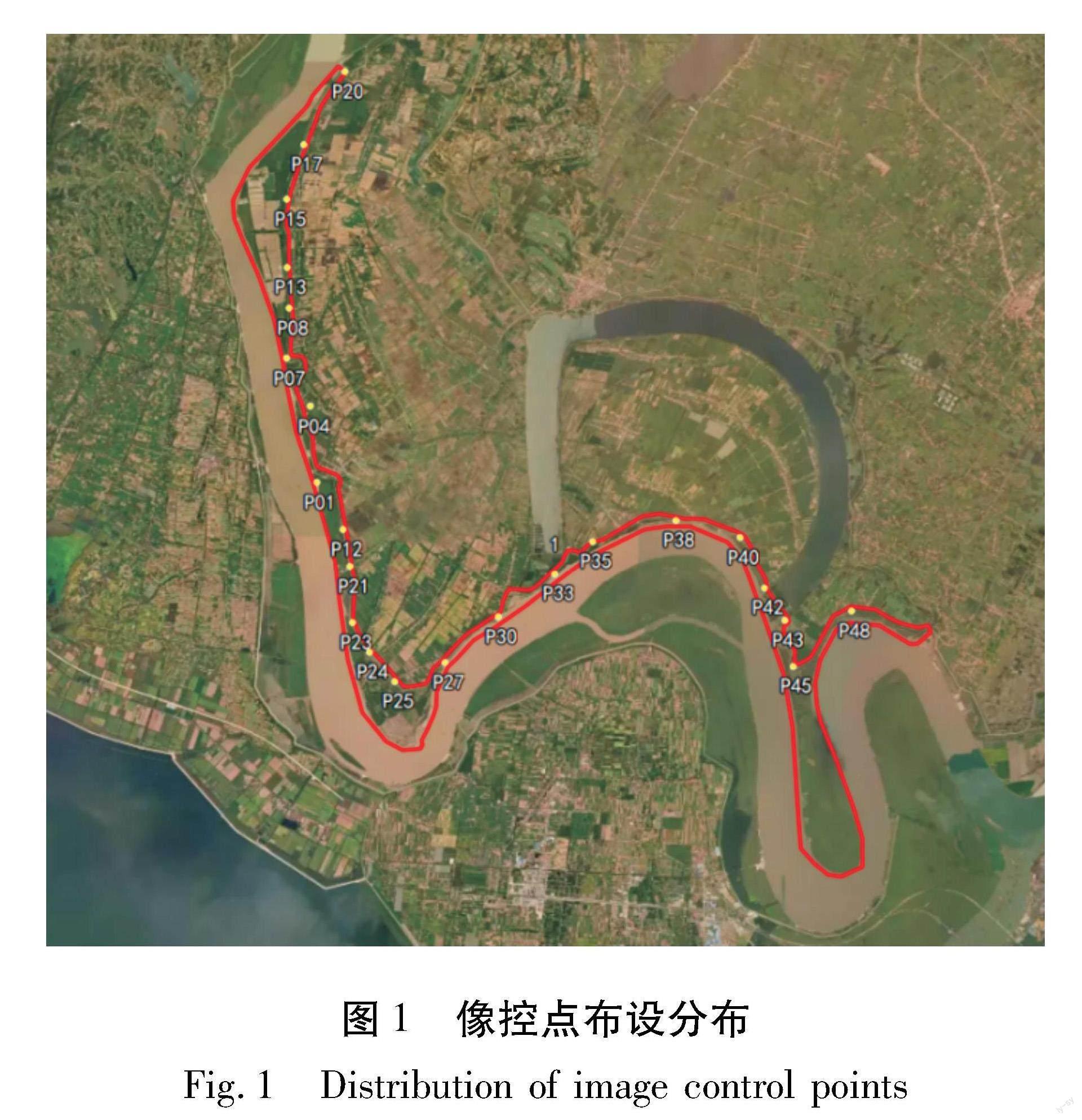
为保证行蓄洪空间实景三维模型的绝对精度,外业布设了51个像控点。关于像控点布设,应选择影像能清晰辨认、没有遮挡的明显特征地物,相交角度好的线状特征地物的交点以及明显特征地物的拐角顶点[8]。布设密度根据要求及现场环境而定,同时布设一些检查点。像控点应在航拍前布设,并在已有的地形图或影像资料上选点布设并现场调整,三洲联垸行蓄洪空间像控点布设见图1,控制点分布均匀,可实现对项目区域精度有效控制。
像控点测量采用GNSS-RTK 技术,通过GNSS-RTK技术获取的控制点的坐标系统为地理坐标系统,根据项目要求,需要先将控制点地理坐标系统转成平面坐标系统。野外量测控制点时,需密切关注卫星信号状况,保证可观测到卫星数目大于5个,PDOP(Position Dilution of Precision)值小于5。控制点量测完,在每个点位均拍摄含有参照物的照片至少2张,作为点之记。
关于布设控制点精度,通过内业测算,像控点的精度相对于附近起算点的平面位置中误差低于图上0.1 mm,即实地5 cm;相对于附近起算点的高程中误差不超过基本等高距的1/10,即实地5 cm。
2.3 数据处理
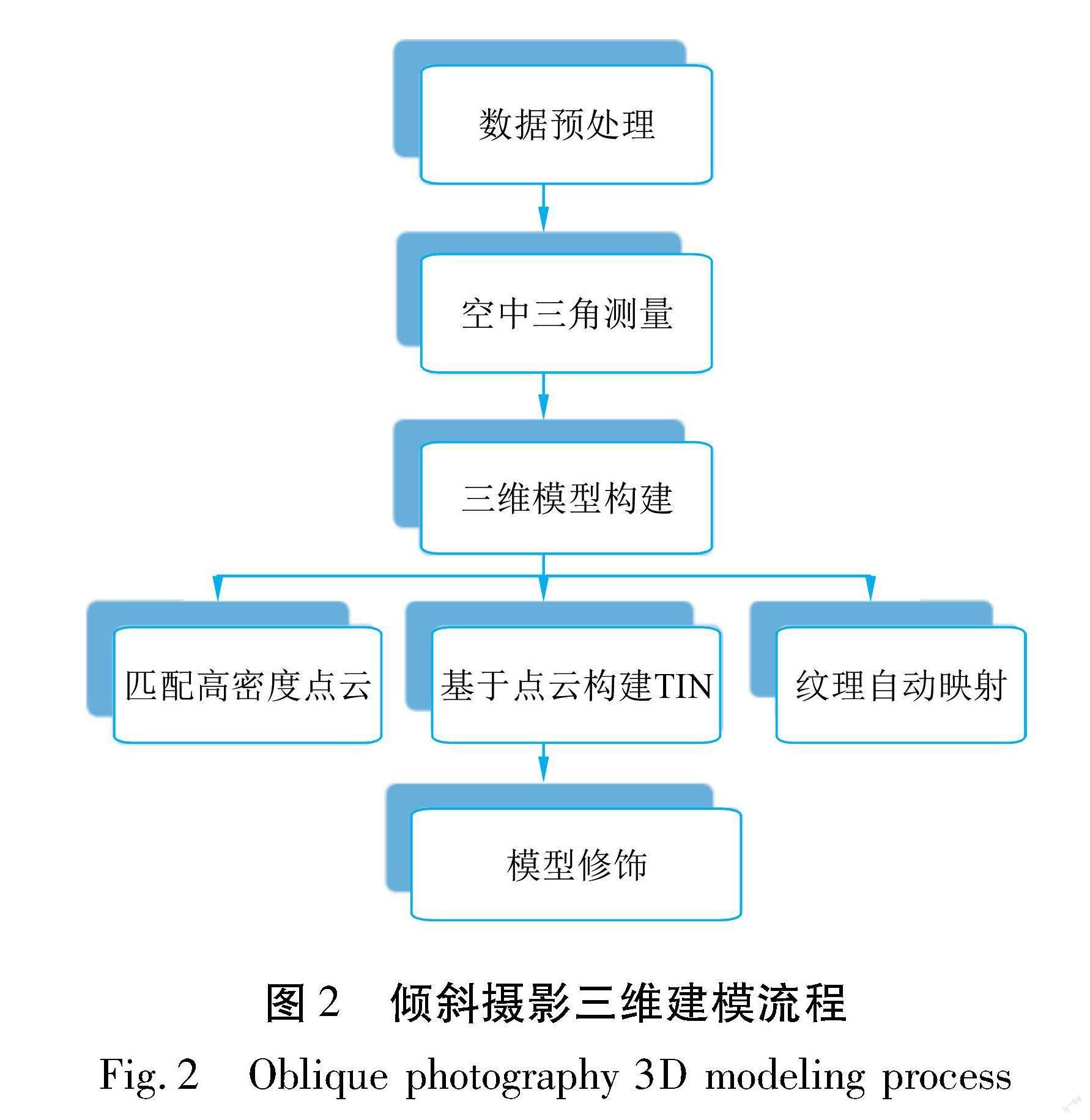
倾斜航摄三维建模内业数据处理使用ContextCapture 软件,是目前市面上最常用的三维建模软件之一,主要有三大模块,即Context Capture Master(主控制台)、Context Capture Engine(任务启动引擎)、Acute3D Viewer(可视化模块)。Context Capture支持在集群环境并行运算,配置好路径,可在多台工作站上运行Context Capture Engine,从而大幅度提升建模效率。倾斜摄影三维建模流程如图2所示。
2.3.1 数据预处理
影像数据预处理主要分为以下几个步骤:① 检查影像数量与POS文件中数量是否一致;② 影像质检,确认影像无过暗、扭曲等;③ 无人机获取的影像转换为目标坐标系统和相应投影;④ 保证影像名称和POS中影像名称一致。
2.3.2 空中三角测量
空中三角测量是三维建模关键步骤,其目的是解算航拍影像外方位元素。将下视影像外方位元素、相机文件、5 个视角倾斜影像导入软件构网平差,再引入野外像控点,经反复滤波、平差,直至解算出满足精度要求的所有影像的精确外方位元素[9]。
空中三角测量分为自由网平差和约束平差,应用基础Patch匹配的多尺度多视角密集匹配方法,该算法基于深度融合框架进行密集匹配,计算深度图。算法既考虑多尺度信息,同时又考虑了匹配的光照信息、几何信息、影像的可见性信息,以提升匹配精度[10]。自由网平差完成后,利用控制点在Context Capture中刺点,刺点完成后再次提交空中三角测量并进行约束平差,以保证三维模型绝对精度。空中三角测量完成后检查空中三角测量精度报告,发现误差为0.53个像素,精度满足要求。
2.3.3 三维模型构建
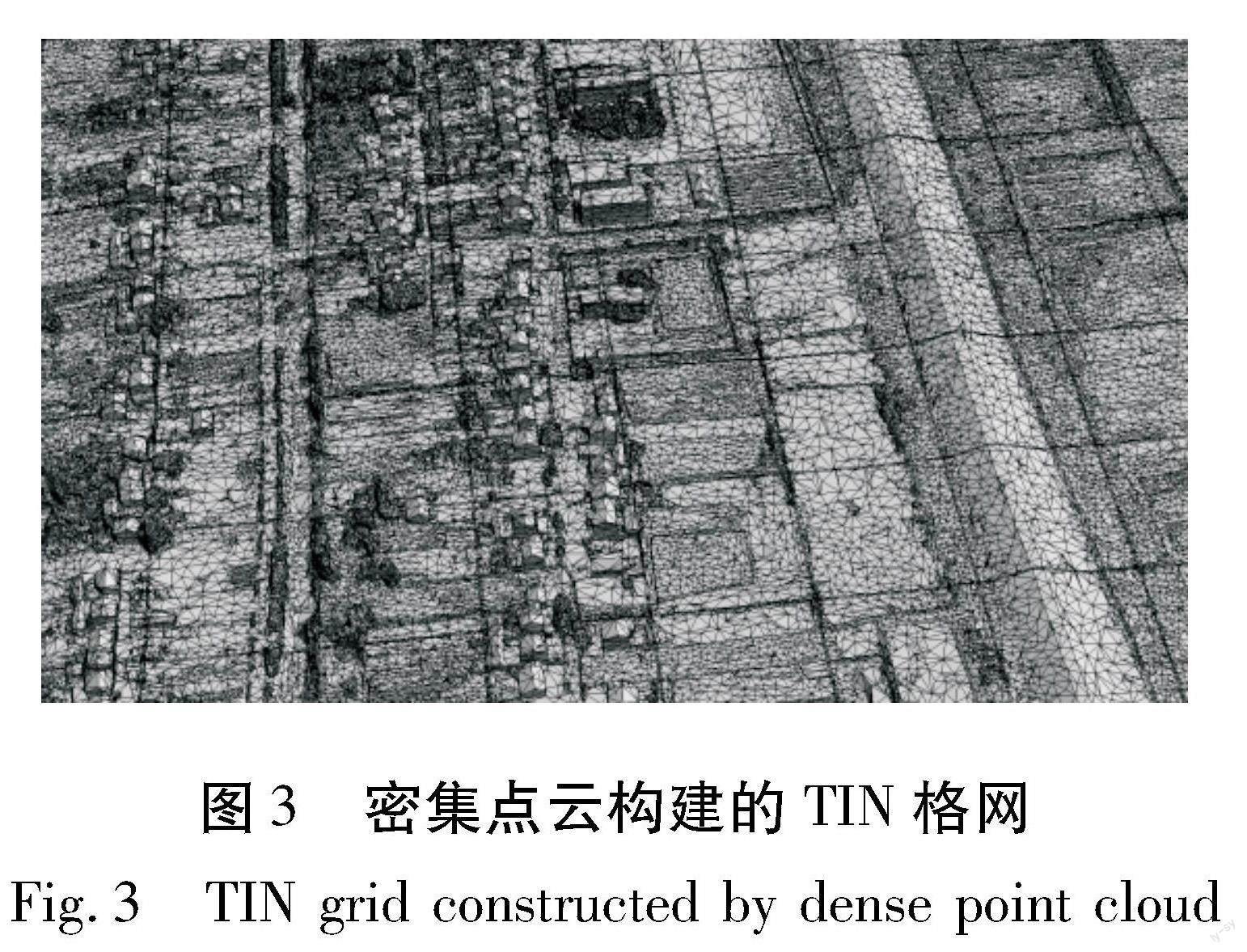
影像通过密集匹配生成高密度信息点云,由于点云数据量大,需先对点云数据分块,分块大小主要由内业数据处理工作站的性能决定。基于分块后的点云数据构建TIN,此时三维模型为白模,未进行纹理映射,没有纹理信息,如图3所示。Context Capture软件自动根据白模的空间结构从不同视点的多幅影像中选取最优纹理图贴合在白模上,完成纹理映射,得到实景三维模型,如图4所示。
2.3.4 模型修饰
针对实景三维模型漏洞、平面(水面、道路)、凹凸不平等现象,需人工进行实景三维模型修饰。DP-Modeler是一款集单体建模和Mesh格网模型修饰于一体的软件,通过特有的摄影测量算法实现对实景三维模型的修饰。修饰工作主要包括:① 删除悬浮物;② 补充存在空洞的地方;③ 对不平整路面等进行平滑处理,拟合到平面;④ 拉直部分扭曲的建筑物;⑤ 针对需要精细化展示的建筑物进行单体化重建,再映射实景纹理[11]。本项目模型修饰主要涉及水域,水域没有明显特征点,无法匹配出完整点云,易出现漏洞,所以利用DP-Modeler统一做压平处理。DP-Modeler具备多瓦片联合处理功能,无需切换即可实现大面积水面自动修补。图5和图6分别为水域修饰前和修饰后的图像对比。
2.4 成果分析
2.4.1 實景三维模型位置精度分析
实景三维模型位置精度包括平面精度和高程精度,精度检验主要利用DasViewer软件和中误差计算公式。DasViewer软件是大势智慧自主研发的一款公开的轻量级实景三维模型浏览器,无需插件,支持大规模倾斜实景三维模型极速加载展示,具备方便快捷的量测功能,能够实现长度、面积以及三维坐标值精准量测。
精度检验流程如下:① 利用DasViewer软件打开实景三维模型,在模型上找出野外实测检查点的位置即点之记;② 使用DasViewer软件的量测工具直接量测检查点坐标,并将其作为模型坐标,将野外实测检查点的坐标作为实测坐标;③ 计算模型坐标与实测坐标的差值作为x、y、h方向上的真误差和中误差。中误差是用来衡量观测精度的一种常用指标,可以很好地反映误差精度,在测绘领域应用广泛。中误差公式如下:
σx= ∑ni=1x实测-x模型2/n (1)
σy= ∑ni=1y实测-y模型2/n(2)
σxy= σ2x+σ2y(3)
σh= ∑ni=1h实测-h模型2/n(4)
式中:x实测、y实测、h实测为检查点的实测坐标值,x模型、y模型、h模型为在三维模型上量测的坐标值;σxy为点的平面中误差;σx、σy为点在x、y方向上的中误差;σh为点在高程上的中误差。
将野外实测检查点坐标与DasViewer中量测的坐标进行x、y和h三个方向比对,见表1。由表1可知,y方向误差整体较小,最大误差值为0.087 m,在2个像素以内,最小误差为0.008 m;50%检查点平面误差在2个像素以内,仅有1个检查点平面误差在3个像素以上;27.8%检查点高程误差在1个像素以内,66.7%检查点高程误差在2个像素以内。
各检查点平面误差值分布如图7所示。由图7可知,大部分检查点平面误差都在2个像素左右;检查点P11平面误差值最大,其次为P13,分别达到4个像素和3个像素,通过查看点之记图片,发现检查点P11和P13位于地物特征不明显区域,误差主要与地物特征不明显匹配连接点少有关。
各检查点高程误差值分布如图8所示。由图8可知,P06高程误差最大,P21高程误差最小,实景三维模型高程精度整体较好。
整理汇总18个检查点的平面误差和高程误差,并利用公式计算中误差,如表2所示,可知测区平面误差和高程误差的最大误差、最小误差、平均误差以及中误差。
由表2可知,实景三维模型的平面平均误差为0.099 m,在2个像素以内;高程平均误差为0.000 6 m,在1个像素以内,精度较好。实景三维模型的平面中误差和高程中误差分别为0.104 m与0.121 m,均在3个像素以内。根据CH/T 9015-2012《三维地理信息模型数据产品规范》,当平面中误差不大于0.5 m、高程中误差不大于0.37 m,可达到1∶500比例尺测图的精度要求[12]。因此,本次实景三维模型精度可达到1∶500测图的要求,实景三维模型的平面精度和高程精度达到Ⅰ级产品的精度要求。
2.4.2 实景三维模型应用
作为长江中下游行蓄洪空间的基础数据底板之一,高精度行蓄洪空间实景三维模型支持准确定位行蓄洪区以及洲滩民垸位置。针对行蓄洪空间分洪运用、调度效果分析,传统方式主要基于一、二维水动力学模型实施,计算时间较长,无法快速准确反映物理世界真实扰动对孪生世界的信息反馈以及孪生世界的交互决策对真实物理世界的作用影响。利用无人机航飞倾斜影像、DEM、DOM以及倾斜实景三维模型构建数字孪生数据底板和数字化场景,并在其他监测数据实时更新驱动下,使基于数据驱动的模型成为行蓄洪空间实时调度模拟分析运用的一条新路径。
高精度倾斜实景三维模型支持构建智慧管控平台,在平台上可进行模型查看、三维分析以及对边坡、滑坡体和相关水工建筑物的管理和可视化展示,为管理人员提供直观的数据支持。另外,以实景三维模型为基础可制作相匹配的数字高程模型并派生出等高线、坡度图等信息,通过配套软件对地形进行分析,支持计算地基的土石方量[13]。
3 结 论
本文以长江中下游三洲联垸行蓄洪空间为研究对象,利用飞马D200获取项目区域五视角影像,采用Context Capture软件全自动构建区域地物的高精度实景三维模型,并利用野外量测的检查点对构建的实景三维模型精度进行评定,可得到以下结论。
(1) 采用倾斜摄影三维建模方法,通过无接触方式能够快速获取五视角影像、全自动化构建高精度模型,节省了大量人力物力,能高效率地获取数字孪生行蓄洪空间的数据底板。
(2) 实景三维模型平面中误差和高程中误差分别为0.104 m和0.121 m,按照CH/T 9015-2012《三维地理信息模型数据产品规范》,可达到1∶500比例尺测图的精度要求。高精度实景三维模型对行蓄洪空间分洪运用、调度效果分析有重要的参考意义。
参考文献:
[1] 王权森.长江中下游行蓄洪空间数字孪生建设方案构想[J].人民长江,2022,53(2):182-188.
[2] 谢云鹏,吕可晶.多源数据融合的城市三维实景建模[J].重庆大学学报,2022,45(4):143-154.
[3] 朱庆,张利国,丁雨淋,等.从实景三维建模到数字孪生建模[J].测绘学报,2022,51(6):1040-1049.
[4] 周靖鸿,彭云,向朝,等.水电站枢纽区倾斜摄影测量建模及精度评定[J].测绘与空间地理信息,2021,44(12):172-174.
[5] 史學军.倾斜摄影技术在黄河流域水利工程三维建模中的应用实践[C]∥中国水利学会.中国水利学会2018学术年会论文集第三分册.北京:中国水利水电出版社,2018:5.
[6] 严孝云.基于倾斜摄影测量技术的实景三维建模技术研究[D].山东:山东科技大学,2019.
[7] 马丹璇,张丙先,谢建波,等.无人机近景测量技术在高陡边坡地质调查中的应用[J].水利水电快报,2021,42(10):38-42.
[8] 郭向前,郝伟涛,米川,等.倾斜摄影在南水北调三维实景建模中的应用[J].地理空间信息,2021,19(7):49-52.
[9] 王迎春.基于Smart3D无人机倾斜摄影实景三维建模浅析[J].地理空间信息,2019,17(12):15-19.
[10] 郑伯桢,文政兵.基于航摄技术的城市实景三维建模[J].测绘与空间地理信息,2022,45(5):178-181.
[11] 刘伟,翟斌斌,刘燃,等.无人机倾斜航空摄影在三维实景建模中的应用[J].地理空间信息,2020,18(1):45-46.
[12] 国家测绘地理信息局.三维地理信息模型数据产品规范:CH/T 9015—2012[S].北京:测绘出版社,2012.
[13] 刘尚蔚,李闯,魏群.面向水利工程的空地一体三维重建方法研究[J].华北水利水电大学学报(自然科学版),2020,41(6):73-77,84.
(编辑:唐湘茜,张 爽)
Research on construction of real scene 3D model of digital twin for flood discharge and storage space of Yangtze River
WANG Kaihua,GAN Zheng,SHI Juanjuan
(Changjiang Space Information Technology Engineering Co.,Ltd.,(Wuhan),Wuhan 430010,China)
Abstract:
Digital twin is an important technical means for digital watershed transformation.To strongly support the construction of data base plate in digital watershed twin,a flood discharge and storage space in the middle and lower reaches of Yangtze River was taken as the research object,Pegasus drone D200 was used to obtain five-angle images of the measurement area,and the real 3D model was automatically constructed based on the Context Capture software.The accuracy of the model was evaluated by the field inspection points.The results showed that the plane error and elevation error of the 3D model based on oblique photography were 0.104 m and 0.121 m respectively,and both within 3 pixels,which can meet the requirements of 1∶500 scale mapping.The 3D digital scene based on the high-precision 3D real scene model can provide a reference for the application of flood discharge and storage space in real-time scheduling simulation analysis.
Key words:
real scene 3D model; digital twin; oblique photography; flood discharge and storage space
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
计算机系统应用(2022年4期)2022-05-10 08:41:10
天津医科大学学报(2021年4期)2021-08-21 02:14:52
华人时刊(2021年23期)2021-03-08 09:27:24
当代陕西(2020年23期)2021-01-07 09:24:44
国际呼吸杂志(2019年4期)2019-03-12 01:08:18
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
北方音乐(2017年4期)2017-05-04 03:40:09
现代计算机(2015年31期)2015-09-28 05:31:51
全球定位系统(2015年4期)2015-02-28 12:38:13