基于单镜头无人机的胜天水库大坝测绘
2024-02-28 09:19潘绍林
水利水电快报 2024年1期

收稿日期:
2023-06-14
作者简介:
潘绍林,男,工程师,硕士,主要从事水利水电测绘工作。E-mail:shaolinpan0811@sina.com
引用格式:
潘绍林.基于单镜头无人机的胜天水库大坝测绘
[J].水利水电快报,2024,45(1):23-27,38.
摘要:
为获取多视角影像,保证实景三維模型的建模质量,以胜天水库项目区域测绘为例,通过摄影测量2D、井字飞行、五向飞行3种航线构建实景三维模型,并进行三维模型精度比较;采用CASS_3D平台进行1∶500地形图立体测绘,并与网络RTK地形图测绘成果进行对比分析。结果表明:3种航线建模方法测绘的地形图均达到1∶500地形图精度要求;其中,通过五向飞行航线获取影像资料建立的实景三维模型取得的平面地物信息误差最小、精度最好。研究成果可为中小型测绘生产单位使用单镜头无人机在山区地形起伏较大、作业难度较高的区域开展水库大坝测绘提供参考。
关键词:
单镜头无人机; 三维建模; 地形图; 测绘; 胜天水库
中图法分类号:TV221
文献标志码:A
DOI:10.15974/j.cnki.slsdkb.2024.01.004
文章编号:1006-0081(2024)01-0023-05
0 引 言
水库大坝实景三维模型和大坝周围大比例尺地形图是水库大坝安全鉴定工作中的基础资料。受山区水库地形起伏较大、山势陡峻、库区山林密集、难以实地抵达等因素制约,大坝两岸稳定情况难以掌握。传统测绘技术(RTK、全站仪)在水库大坝1∶500地形图野外测绘工作中面临诸多限制,如工作强度大、耗时长、成本高、效率低且危险性高等[1-2]。针对水库大坝野外测绘难点,无人机技术具有许多优势,如机动灵活、高效快速、成本低廉、信息丰富、适应性好等,得到广泛应用[3-6]。无人机航摄影像不仅能够快速地获取地面真实情况,而且在小范围、大比例尺地形图测绘领域具有明显的优势[7]。固定翼无人机[8-9]或搭载五镜头相机的多旋翼无人机[10-11]摄影测量技术已较为成熟,并广泛应用于1∶500比例尺的测图项目中。相对于少则几十万元、多则上百万元市场价格的固定翼无人机与五镜头多旋翼无人机,单镜头无人机[12-13]成本低且飞行灵活,更适合生产单位在小范围区域进行大比例尺地形图摄影测量[14]。然而,单镜头无人机续航能力和载荷能力都偏弱,因此,需合理规划无人机航线,使单镜头无人机获取多视角影像,确保三维模型重建的质量[15]。
本文针对贵州省山区水库大坝——胜天水库区域地形起伏较大、测绘作业难度较大的情况,借助大疆精灵4 RTK无人机,设计摄影2D、井字飞行、五向飞行3种航线获取大坝影像数据。探索在像控点较少的情况下,采用单镜头无人机替代固定翼或五镜头多旋翼无人机进行三维测绘建模作业,并检验不同航线规划下,三维模型产生的平面精度是否能满足1∶500大比例尺地形图测绘要求。研究采用Context Capture软件构建真实三维场景,并对3种不同航线规划的模型进行精度分析。最后,通过CASS_3D平台完成了胜天水库大坝一定范围内1∶500地形图的绘制。本研究为中小型测绘生产单位进一步应用单镜头无人机在类似山区水库大坝测绘项目中进行三维摄影建模及平面图转化提供了更加高效、准确的测绘解决方案。
1 项目概况及技术设计
1.1 项目概况
胜天水库位于贵州省毕节市偏岩河支流金沙河沙岭河段,距金沙县城约2.5 km,是一座以防洪、工业供水、生态环境用水等综合利用为主的中型水库。该工程主要由拦河大坝、溢洪道、泄洪放空隧洞及灌溉引水隧洞等建筑物组成。水库的正常蓄水位为966 m,总库容1 250万m3,坝址以上集水面积58.3 km2,最大坝高59.8 m。本次水库测区面积约为0.23 km2。测区地形起伏较大,山势陡峻,植被覆盖多,库区的岸坡稳定情况难以掌握。由于测量人员实地作业困难,综合考量测区地形、人员安全、作业时长等因素,采用单镜头大疆精灵4 RTK无人机测绘获取1∶500地形图。
1.2 技术设计
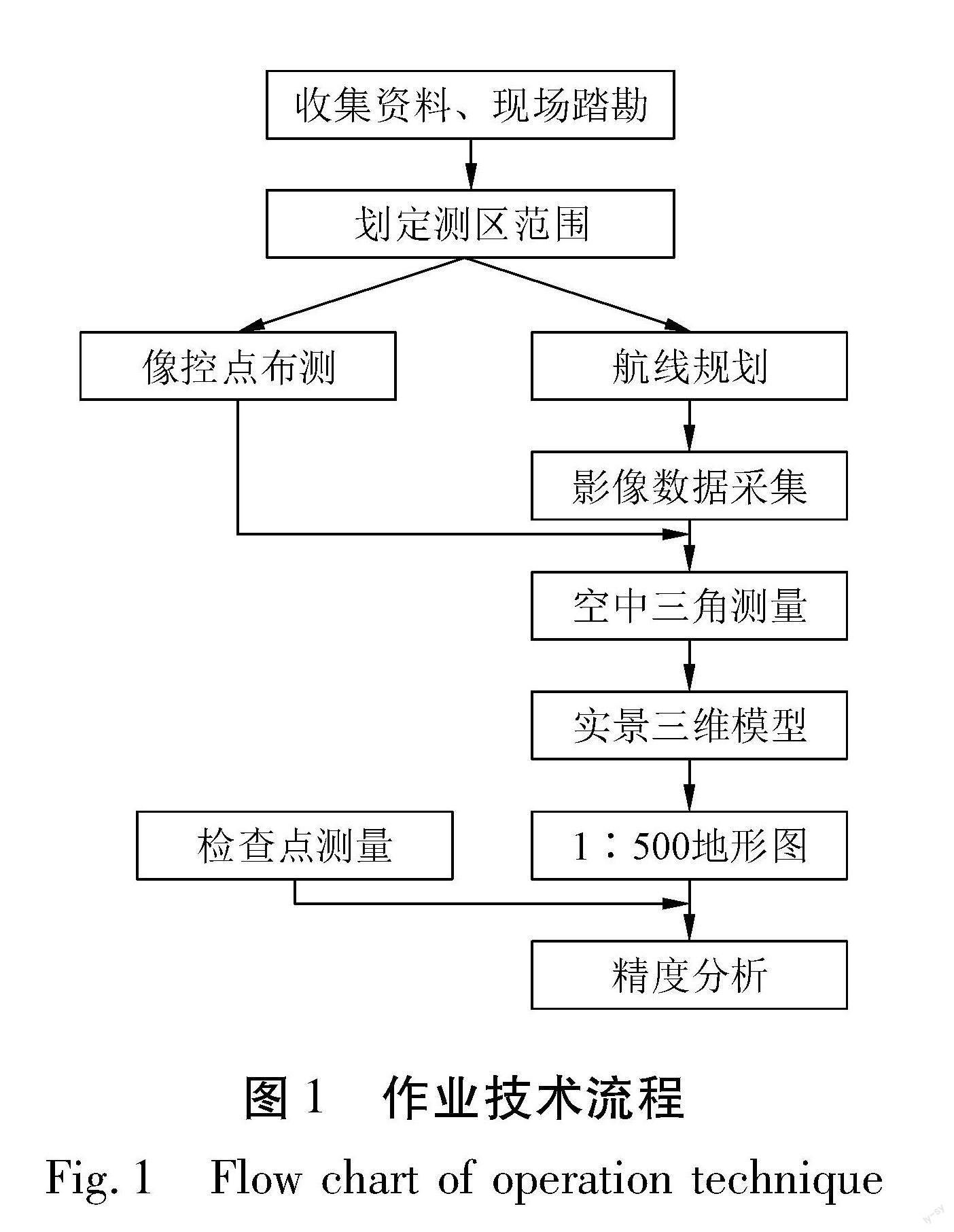
单镜头无人机在街区、校园等地势平坦的小区域1∶500地形图测绘中得到广泛应用,但在地形起伏较大的水库大坝测绘项目中应用较少。根据任务目标,项目作业技术路线主要包括以下3个方面内容。① 收集测区附近控制点等资料。② 外业工作:现场踏勘、划定测区范围、像控点布测、航线规划、影像数据采集。③ 内业工作:建模前工作准备、提交一次空中三角测量、刺像控点、再次提交空中三角测量、实景三维建模、三维模型比较、1∶500地形图生产、精度分析等工作内容。作业技术流程如图1所示。
2 实景三维建模及测图
2.1 外业数据采集
2.1.1 像控点布测
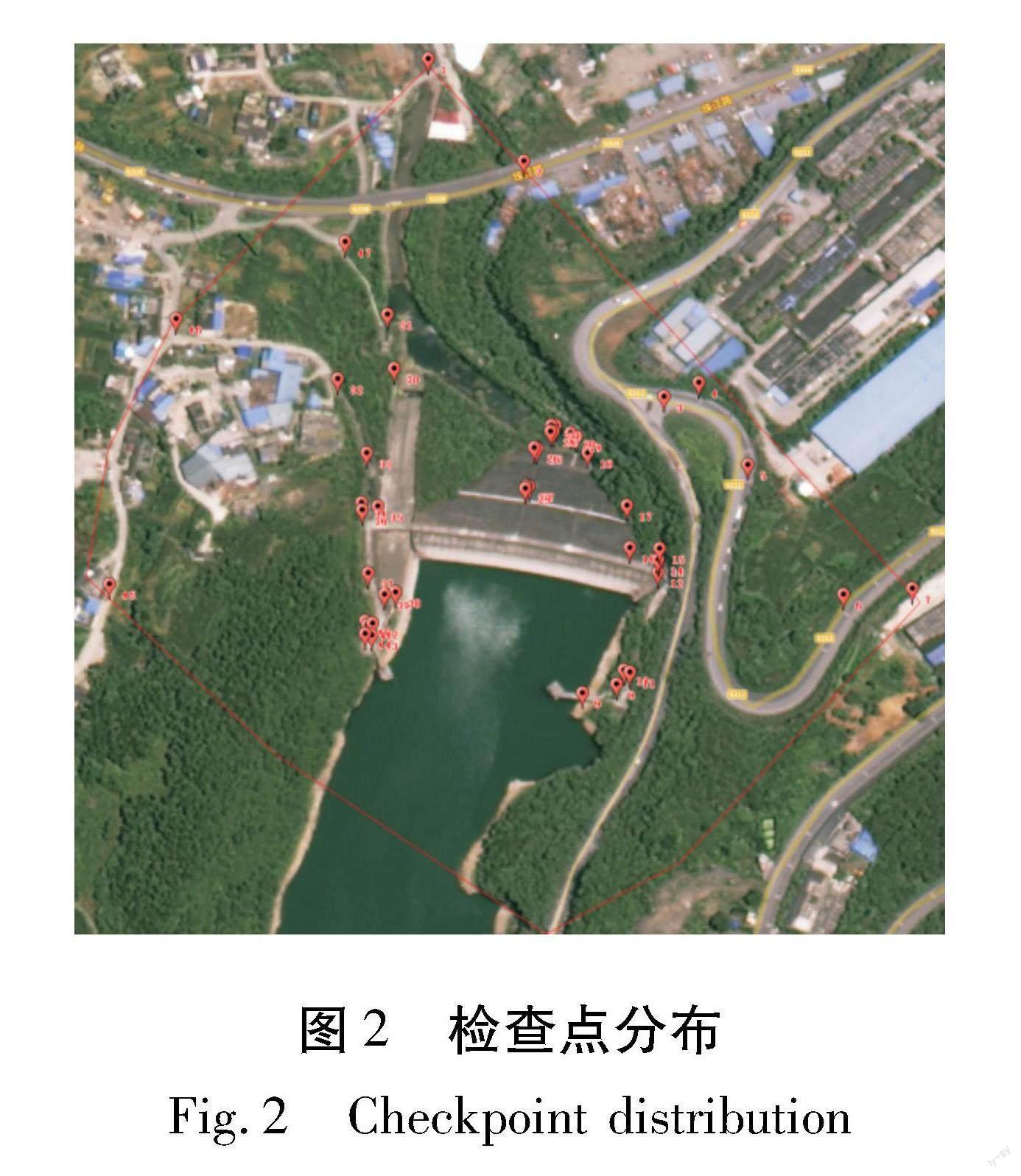
像控点的选择对模型精度有重要影响。选择的像控点必须在航片上可清晰辨认且没有遮挡。合理布设像控点达到一定数量后,进一步增加像控点数量对于提高无人机成图精度并不会有显著意义,反而会增加内外业工作量。测区边缘与内部应均匀、适当布设像控点,以保证平面和高程精度[16-17]。因此,无人机起飞前,在测区边缘均匀布设5个“L”像控点,区域内部加设2个“L”像控点。在像控点数据采集过程中,使用网络RTK方式进行像控点量测,具体操作为:测量时,将三角支撑杆固定在目标点上,每个点进行两次测量,每次测量的平滑时间为10 s,并对两次测量结果进行检查。将满足规范的两次测量值取平均作为最终的像控点坐标成果。像控点布测的同时,随机测量道路、花圃、围墙、台阶、房屋、交通桥等47个碎步点作为检查点。检查点分布如图2所示。
2.1.2 影像数据采集
测区地形起伏较大,右岸有高压线铁塔等建筑物,为了保证无人机的飞行安全,按照CH/Z 3005-2010《低空数字航空摄影规范》测图比例尺为1∶500时地面分辨率优于5 cm的要求,起飞点选在大坝坝顶。大疆精灵4 RTK支持多种航线规划方式,包括航点飞行、大区分割、仿地飞行、变高航带、摄影2D、井字飞行、五向飞行等,其中摄影2D、井字飞行、五向飞行是常用的飞行航线规划方式,广泛应用于三维摄影测量的影像获取中。攝影2D规划航线与3D规划航线(井字飞行、五向飞行)相比,多适用于正射影像图的获取。在五向飞行作业时,无人机在每条航线作业时不需要调转机头,而井字飞行需要调转机头作业。五向飞行可以采集1条正射和4个方向倾斜影像数据,而井字飞行只能采集4个方向倾斜影像数据,因此五向飞行获取的影像数据量大于井字飞行,但作业时间较长;井字飞行数据采集较少,作业时间短。
综合考虑地形起伏、建筑物等因素,本文设计摄影2D(图3)、井字飞行(图4)、五向飞行(图5)3种航线规划方式进行影像数据获取。
(1) 方案一:摄影2D。航向重叠度80%,旁向重叠度80%,相对航高120 m,返航高度120 m,云台角度-90°,拍照模式为等距离。共获409张影像,耗时约26 min,影像平均地面分辨率3.55 cm。
(2) 方案二:井字飞行。航向重叠度80%,旁向重叠度80%,相对航高120 m,返航高度120 m,云台角度-60°,拍照模式为等距离。共获1 000张影像,耗时约61 min,影像平均地面分辨率3.94 cm。
(3) 方案三:五向飞行。航向重叠度80%,旁向重叠度70%,相对航高120 m,返航高度120 m,云台角度-45°,拍照模式为等距离。共获1 475张影像,耗时约106 min,影像平均地面分辨率4.65 cm。
2.2 内业数据处理
2.2.1 实景三维模型建立
Context Capture软件具有较高的实景三维模型成果精度,数据处理过程中需要的人工干预较少,因此工作效率较高。将野外获取的影像导入该软件中,为了便于刺点,在导入前先提交一次空中三角测量,编辑像控点数据文本格式并导入,同时尽可能刺取更多影像清晰的点。再次提交空中三角测量,检查空中三角质量报告;最后,进行实景三维模型的构建。根据不同影像数据采集方案建立的溢洪道模型交通桥如图6所示。
从图6可知,方案一生成的实景三维模型与方案二、方案三生成的模型差距较大。3种方案获取的三维模型纹理信息都有所缺失。其中,方案三的模型精度最高,模型纹理信息较清晰,拉花和缺失少;方案一的模型拉花及缺失较明显,方案二的三维模型表现能力明显好于方案一。由此可见,方案一因其拍摄角度的局限性,所获交通桥下及侧面的影像信息不够丰富与完整,其三维模型的真实性与准确性远不如方案二、方案三。因此,实景三维模型测图采取五向飞行航线构建实景三维模型,并与网络RTK地形图测绘成果进行对比分析。
2.2.2 实景三维模型测图
3种方案下,Context Capture软件生成实景三维模型时,由于水库水面特征点少,软件在计算时很难正确匹配,导致输出模型的水面较多空洞。进行水面约束后,可生成非常平整的模型。根据方案三生成的测区实景三维模型如图7所示。
将实景三维模型导入CASS_3D软件,进行平面地物信息的采集。在三维模型上采集高程点,先建立三角网,后生成等高线并整饰出图。最终生成测区1∶500地形图如图8所示。
3 精度分析
对不同方案构建得到的模型进行精度分析。以检查点的实地量测坐标为真值,以对应模型点坐标为观测值,检查3种方案对应模型平面精度及高程精度。精度通常用中误差来衡量和评定,中误差计算公式如式(1)所示:
σX= ∑Δx2nσY= ∑Δy2nσS= σX2+σY2σZ= ∑Δz2n(1)
式中:σX、σY、σZ分别为点在X、Y、Z方向的点位中误差;σS为点的平面点位中误差;Δx、Δy、Δz分别为X、Y、Z方向真误差,n为检查点个数。
计算得到不同方案下三维模型的点位中误差如表1所示。各检查点平面点位中误差如图9所示,高程点位中误差如图10所示。
从表1和图9~10可以得出以下结论:① 方案一模型的检查点平面点位中误差为0.03~0.09 m(均方根误差0.064 m),高程点位中误差为0.02~0.09 m(均方根误差0.065 m)。② 方案二模型的检查点平面点位中误差为0.02~0.06 m(均方根误差0.044 m),高程点位中误差为0.02~0.07 m(均方根误差在0.048 m)。③ 方案三模型的检查点平面点位中误差为0.01~0.04 m(均方根误差0.029 m),高程点位中误差为0.01~0.06 m(均方根误差0.038 m)。④ 方案三的模型误差最小,精度最好,方案一的模型精度误差最大,精度较低。⑤ 3种不同方案建立的模型平面点位中误差较小,高程点位中误差略大,但均满足SL 197-2013《水利水电工程测量规范》中对山地1∶500地形图平面位置允许中误差为±0.4 m、等高距1 m的山地地形图高程允许中误差为±2/3 m的要求。
4 结 论
本研究利用大疆精灵4 RTK无人机对胜天水库大坝安全鉴定项目区域采用摄影2D、井字飞行、五向飞行3种不同航线进行摄影测量,获取了不同影像数据,并对3种不同影像数据构建的三维模型进行了对比分析。重点探讨了模型纹理信息的完整性及检查点精度两个方面,结果表明:在地形起伏较大的小区域内,采用3种航线建模方法测图均能满足1∶500比例尺地形图的测绘精度要求。相较于传统测绘,单镜头无人机测绘技术不仅大幅度缩短了外业时间,而且生成的三维模型具有立体、直观的实景信息,能够比较准确地还原项目现场情况。本文对于中小型测绘生产单位在山区地形起伏较大、作业难度较高的水库大坝测绘项目中使用单镜头无人机进行三维摄影建模具有参考价值。
參考文献:
[1] 郑哲瀚,蒋王军.大疆无人机在垦造水田竣工验收项目中的应用[J].测绘与空间地理信息,2023,46(3):179-181.
[2] 杨智翔,田佳,周航宇.无人机航测在某水库1∶2000地形测绘中的应用[J].地理空间信息,2019,17(3):1-3.
[3] WU H,WANG Y,XING L,et al.Application analysis of three-dimensional real scene modeling of substation site based on UAV tilt photography[C]∥2021 2nd International Conference on Intelligent Design (ICID).Xi′an:IEEE,2021:220-225.
[4] 马丹璇,张丙先,谢建波,等.无人机近景测量技术在高陡边坡地质调查中的应用[J].水利水电快报,2021,42(10):38-42.
[5] 潘成军.无人机倾斜摄影在道路工程中的应用与分析[J].测绘工程,2018,27(12):64-69,74.
[6] 马银,郑国强,姚国标,等.基于倾斜摄影的大比例尺地籍测量及精度验证[J].测绘工程,2019,28(1):67-72.
[7] 徐思奇,黄先锋,张帆,等.倾斜摄影测量技术在大比例尺地形图测绘中的应用[J].测绘通报,2018(2):111-115.
[8] 焦旺,刘凯.无人机航测在亭口水库1∶500地形测量中的应用[J].西北水电,2016(1):23-26.
[9] 贾智乐.飞马 F200无人机在大型水利工程及 BIM 建设中的应用[J].测绘通报,2019(9):159-162.
[10] 赵小阳,孙松梅.无人机倾斜摄影支持下的1∶500高精度三维测图方案及应用[J].测绘通报,2019(7):87-91.
[11] 张亚林.多旋翼无人机倾斜摄影测量技术在水利工程测量中的应用[J].四川水利,2021,42(5):43-46,88.
[12] 蓝贵文,李壁宏,凌聪聪,等.小区域单镜头无人机倾斜摄影航线布设及建模精度研究[J].合肥工业大学学报(自然科学版),2022,45(8):1061-1065.
[13] 向华林,李秉兴.单镜头无人机倾斜摄影测量的三维建模及精度评估[J].测绘通报,2022(增2):237-240.
[14] 丁涛,付贵,刘超,等.消费级无人机在1∶500地形图测绘中的应用[J].合肥工业大学学报(自然科学版),2021,44(6):840-844.
[15] 王云川,段平,李佳,等.多旋翼单镜头无人机不同航线规划的三维建模方法评述[J].测绘通报,2020(3):105-108.
[16] 周诗洋,吴向阳.像控点布设对勘测定界复杂区域实景建模精度的影响[J].测绘通报,2022(2):1-4.
[17] 周胜洁,邸国辉,李秉乾,等.基于无人机倾斜摄影的像控点布设对空三精度的影响[J].测绘与空间地理信息,2021,44(11):23-26,30.
(编辑:江 焘,高小雲)
Surveying and mapping of Shengtian Reservoir dam based on single-lens UAV
PAN Shaolin
(Bijie Survey,Design and Research Institute,Bijie 551700,China)
Abstract:
To obtain multi-view images and to ensure the quality of 3D model,three routes including photogrammetry 2D,tic-tac-toe flight and five-way flight,were used to survey and map the project area of Shengtian Reservoir to construct live-view 3D models,and 3D model accuracy comparison were carried out.CASS-3D platform for stereo mapping of 1∶500 topographic maps was applied and the results were compared and analyzed with the network RTK field survey results.The results showed that the topographic maps mapped by the three route modelling methods all met the 1∶500 topographic map accuracy requirements.Among them,the image data obtained from five-way flight route was used to establish a live-view 3D model and to collect planar terrain information with the smallest error and the best accuracy.The research results can provide a reference for small and medium-sized surveying and mapping production units to use single-lens UAV in 3D photography surveying and mapping of reservoir dam with large terrain fluctuations and high operational difficulty in mountainous areas.
Key words:
single-lens UAV; 3D modeling; topographic map; surveying and mapping; Shengtian Reservoir
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
建材发展导向(2021年10期)2021-07-16
华人时刊(2021年23期)2021-03-08
河南水利年鉴(2020年0期)2020-06-09
河南水利年鉴(2020年0期)2020-06-09
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
中国公共安全(2017年7期)2017-10-13
河南水利年鉴(2017年0期)2017-05-19
北方音乐(2017年4期)2017-05-04