
平房仓智能扦样系统的设计
2024-02-27 02:50:20邱杏军向佳炬孙寿良张朝富
粮食与饲料工业 2024年1期
邱杏军,向佳炬,孙寿良,张朝富
(国粮武汉科学研究设计院有限公司,湖北 武汉 430079)
粮食生产具有季节性和间断性的特征,粮食从生产到消费须经过储藏环节。随着粮食安全政策的推行和“四散化”(散储、散运、散装、散卸)形式的推广,高大平房仓、立筒仓、浅圆仓成为储备粮的主要仓型[1-2]。平房仓因其储量大、建设成本低的优势,在粮仓里的占比逐渐增加。由于平房仓通风不良,作业环境恶劣,在对粮仓进行扦样时容易发生缺氧窒息、中毒、燃爆等安全事故[3]。在某些紧急情况下需要在熏蒸、气调期间进行扦样,如果人工操作,安全隐患非常大。因此仓内无人智能扦样系统的开发具有实际意义。目前使用较多的扦样机为自动多杆扦样机,能依据车型自动扦样,但其多用在进仓车载粮食的扦样。安徽库图电子科技有限责任公司的王军、白栋发明了一种轨道式的扦样机,通过轨道来实现扦样机构的仓内移动[4]。安徽农业大学的茆玮等设计了一种履带式自动换接杆的扦样系统[5],武汉轻工大学尹强等发明了几种扦样装置,提出了多种扦样方法[6-7]。粮库智能化管理程度不断提高,而扦样作业的自动化和智能化却受到了限制,主要有以下几个方面的原因:
(1)平房仓为有限空间,粮食堆高为6~8 m,粮面以上空间有限,通过布置桁架、轨道等结构来架设扦样装置,需要改造平房仓的建筑结构,给实施带来了困难。
(2)常规扦样需要将样品取回拿到检验室检测后才能发现质变,后续再采取相应的措施,处理周期长,不能实时监控粮食质量。且有时候需要启动第二次扦样确定质变范围,效率低。
(3)平房仓储量大,需多次取样,常规扦样需要人工将扦样空间位置值和样本一一对应,效率低,且容易出错。
为了解决上述问题,设计了一种智能扦样系统,该系统能够实现扦样点的自动定位、定量取样、图像识别初判样品和样品的智能收集。该扦样系统可根据仓房建筑结构选择安装点和安装数量,安装在堆粮线以上的墙壁上,不需要改动仓房的原始结构。
1 扦样系统整机结构及工作原理
扦样系统具有定期全仓扦样和异常点定点扦样两种模式。定期全仓扦样检测是排查粮情的一种常规作业,如果发现变质点,则以变质点为中心进一步扦样,确定变质区域。第二种模式是根据粮情检测系统的温度异常提示,对粮仓内温度异常点位扦样,如果发现变质点,以变质点为中心继续扦样,锁定变质区域。
智能扦样系统包括5个部分:移动装置、扦样装置、图像识别装置、翻转装置、样品收集装置,其结构如图1所示。移动装置采用激光定位装置和平面四索并联机构实现扦样点水平位置的定位,多级丝杆结构实现扦样头纵向位置的定位。扦样装置通过负压和定量U型管进行定量取样。样品先通过在线图像识别预检测,再经过后台详细检验。如果在线图像识别发现霉变、虫害、发黑等可视觉表现的变质情况,则以异常点为中心,开展进一步扦样,将变质范围识别出来,以便快速采取相应的防控措施。预检后的样品通过翻转装置落到样品采集装置上的采集盒中。样品盒上的二维码信息和样品空间位置值进行对应,样品送后台检测时扫码即可将检测结果与样品在粮仓的空间位置对应起来,精准检测仓内粮情。
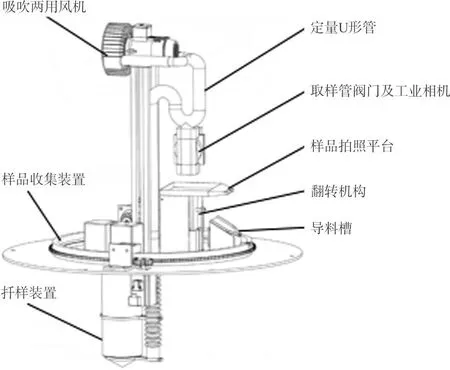
图1 扦样系统结构图
2 扦样方案设计
2.1 扦样点的布局
如果是根据粮情检测系统温度异常提示扦样,即对已知点位进行扦样,通过移动装置将扦样执行机构移动到该点进行扦样即可。如果是对平房仓进行定期常规扦样,就需要对粮仓内的扦样点布局。以中储粮岳阳库平房仓为例,廒间平面尺寸为42 m×24 m,粮堆高度为7 m。常规全仓扦样检测中,扦样点的布局按照国家标准进行分区分层设计,扦样点的布局图如图2所示。
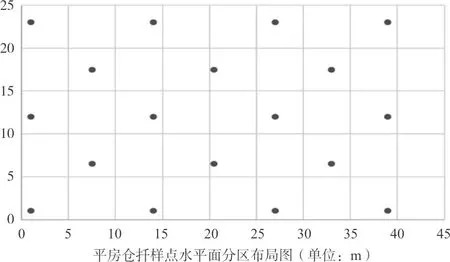
图2 平房仓扦样点分区分层布局图
2.2 扦样机移动几何位置的关系
扦样移动装置由四个卷扬机及其控制系统根据激光测距的位置反馈来进行定位,其在平房仓中的安装示意图如图3所示。以四个卷扬机出线端口为四个顶点,构成了扦样装置的水平投影面。假设扦样头第i次扦样点在投影面上的投影坐标为E(xi,yi),第i+1次扦样点的投影坐标为E′(xi+1,yi+1),四绳索的长度及其与仓库边所成的角度如图4所示。扦样机从某一扦样点移动到下一个扦样点,绳索的长度及其角度均要改变,绳索长度由卷扬机的收放来实现,角度的变化由拨角器完成。移动过程中的动态位置由激光测距仪反馈,通过对反馈坐标不断进行计算、调整运动到达指定点。
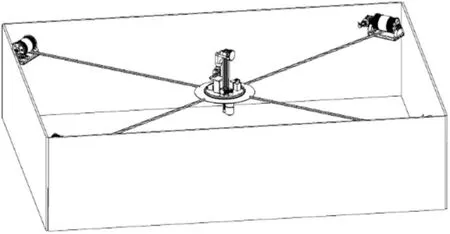
图3 平房仓扦样系统布局图

图4 扦样点空间位置关系图
第i次扦样坐标点为E(xi,yi),第i+1次扦样坐标E′(xi+1,yi+1),两次样点绳索的长度和角度分别为公式(1)~公式(4)。
(1)
(2)
(3)
(4)
根据相邻两次扦样点的绳索长度和角度变化,得到四个卷扬机的收放长度和角度变化为公式(5)~公式(6)。
(5)
(6)
3 控制系统的设计
图5为扦样系统的硬件关系图,图6为扦样系统的控制流程图。

图5 智能扦样系统硬件结构图
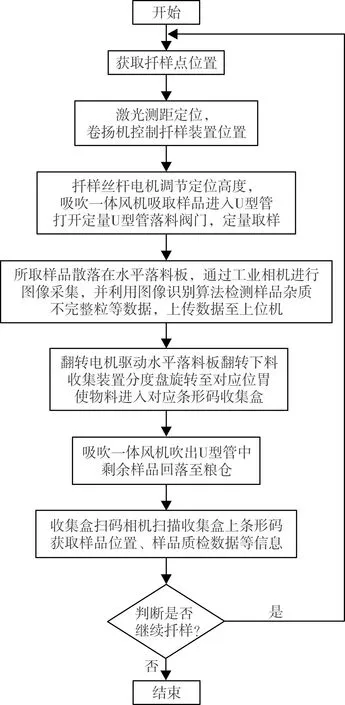
图6 智能扦样系统控制流程图
首先移动装置收到扦样指令和激光测距仪的位置返回值,控制四个卷扬机收放,使扦样装置移动到指定扦样点的平面坐标,再启动扦样丝杆电机工作,使扦样头到达指定的扦样深度。接着启动吸吹一体式风机的吸取模式,将指定点的粮食样品吸入扦样管,吸入动作完成后,开启U型管底部的落料阀门,粮食落到落料板上,落料完成关闭落料阀。工业相机启动采集落料板上样品图像,并进行图像处理。待图像采集完成,落料板翻转电机启动,落料板倾斜将样品倒入收集装置的收集盒中。收集盒扫码相机获取工作工位上的收集盒二维码信息,将其与该样品的位置坐标及图像处理结果一一对应,完成取样工作。收集装置的分度机构转过一个收集盒所对应的角度,等待下一次收集工作。吸吹一体式风机启动吹出模式,将扦样管中多余的粮食颗粒吹出,以免残留影响后续采集结果。扦样系统再根据扦样指令进行下一次扦样工作。
4 结论
(1)该扦样系统采用平面四索并联机构来实现扦样装置在仓内的移动,这种方法不需要改变仓房的原有结构,也不需要增加附属结构,安装方便。
(2)扦样管的设计可以进行定量取样,并将扦样管中残留的样品吹出去,不影响下次取样,使得扦样结果更可靠。
(3)该扦样方法将在线快检和后台精检结合起来,满足了不同的需求。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
装备制造技术(2020年4期)2020-12-25 05:26:04
新世纪智能(高一语文)(2020年12期)2020-06-01 08:14:18
作文大王·低年级(2020年2期)2020-03-13 08:10:04
疯狂英语·新策略(2018年10期)2018-11-16 03:20:42
中国铸造装备与技术(2017年3期)2017-06-21 11:33:46
时代农机(2016年6期)2016-12-01 04:07:20
现代食品(2015年16期)2015-12-20 09:07:14
环境科技(2015年4期)2015-11-08 11:10:40
中学生数理化·中考版(2015年12期)2015-09-10 07:22:44
