
基于激光点云数据的室内设计三维模型构建①
2024-02-26 03:31崔金敏
佳木斯大学学报(自然科学版) 2024年1期
崔金敏
(安徽中澳科技职业学院,安徽 合肥 230001)
0 引 言
高度还原室内场景与物体样貌、重现室内格局设计、呈现真实的设计效果是室内设计领域的基本要求。激光三维扫描技术是三维物体重建的革命性创造[1],对采集的大规模高密度数据点云进行降噪、配准、分割等处理,实体采集对象的三维模型重构,为室内重建设计、建筑古物恢复、场景规划提供了智能手段[2]。激光三维扫描技术高度适应各种复杂的环境,三维空间测量精度能够达到较高的测量标准,符合三维场景重建的精度要求[3]。研究着重探究激光点云数据配准与分割方法,为后期室内场景与物体三维模型重建提供高精度的数据支持,以呈现真实的场景信息。
1 基于激光点云数据的室内三维模型重建方法
1.1 基于自适应邻域的室内设计激光点云配准

(1)

公式中,在X上CX属于连通状态。从点云模型视角而言,点的连通性通过k近邻来描述,也就是当k近邻中一点x和点a为连通关系时,存在x∈k近邻(a)。获得以下结论,点云模型内点局部结构与特征促进了点自适应邻域的生成。为此,基于k近邻定义特征进行自适应调节形成自适应邻域配准策略,过程中如下。
对于匹配种子点对ai⊙bi基于自适应邻域匹配关系获得两个点云原始位置信息。基于ai与bi自适应邻域形状差异执行不同的应对方案[5]:(1)当点对自适应邻域是片状时,与ai,bi构成直线的点需要在最大阶自适应邻域三角面片面内选取,即最大残差角与最小残差角所属的三角面片的内心点omax,omin;将两点和ai,bi分别连接得到两个直线段。(2)当点对自适应邻域是线状时,将和ai,bi距离最大的两个点分别同ai,bi连接,得到两个直线段。对于两种情况得到的直线段实施归一化,以单位向量形式表达。但对于两个单位向量共线的情况,需将第二远的点作为直线段连接点形成新的直线段,归一化为新的单位向量。
单位向量确定完毕呈现三个点坐标信息,且三点不共线,ai、bi点对点云原始位置信息基于三点坐标而确定,求取到待配准点云的初始空间位置变换。最后,将以上述粗配准的点云作为输入,基于迭代最近点算法进行室内设计点云的精确配准[6]。
1.2 基于k-means聚类的室内设计激光点云分割
基于k-means聚类的点云分割优劣很大程度上由聚类中心选取效果决定,为此基于加权概率分布策略选取高性能的室内设计点云初始聚类中心,详细步骤为:
Step 1:定义一个空的点云数据集合为H并还原,将K个聚类中心存储在内;
Step 2:在输入点云数据中随机选择一个中心点,放置集合H内;
Step 3:pi表示不存在集合H中的样本点,求取pi和ci(表示簇i的中心)的距离定义为F(pi),pt为F2(pi)中的最小样本点;
Step 5:循环操作Step 2~Step 4,K个初始点云聚类中心选定时终止。
基于k-means聚类算法的点云数据分割流程为:
输入:待分割点云P={pi|pi∈R3,i=1,2,…,n}
输出:期望点云分割区域数量结果
第一,基于加权概率分布策略选取K个点云初始聚类中心定义为ci,i=1,2,…,k,预设算法聚类收敛的阈值和迭代次数上限值为λ,m。
第二,求取各样本点与中心ci之间的距离,此样本点归属于与其距离最小的中心点;
第三,原有中心点全部采用各类别内全部样本的中心点替换;
第四,△Fi表示求取的各类别内相邻两次聚类中心变量,判断△Fi收敛阈值情况和迭代次数情况以确定是否终止聚类[7]:(1)当△Fi低于收敛阈值或满足迭代次数时,终止聚类;(2)当△Fi不低于阈值λ且不符合迭代次数上限,需继续聚类。
1.3 基于Delaunay三角剖分法的室内三维重建
室内设计激光点云分割完成后基于贪婪投影三角化算法对原始点云数据实施三角化,构建曲面模型完成室内模型重建。基于协方差矩阵的特征矢量、特征值求取室内物体或场景的法线向量[8],具体方法是基于主成分分析进行运算,公式(3)描述了点pi的协方差矩阵C表达式:
(3)
(4)

三维点云可以根据求取的法线投影变换至二维平面内,结合已知的三角网边长与三角形的各类参数,投影获取的点云在平面内的三角化可使用Delaunay三角剖分空间区域增长算法求取得到,三角化后呈现各点拓扑连接关系[9]。在此基础上确定各原始三维点间的拓扑连接,所得三角网格描述的曲面即为重建的曲面模型。
原始点云数据带有真实RGB颜色信息,而该三角面却不具备,所以接下来对三角面进行将原始点云的颜色信息映射,赋予无颜色三角面真实色彩,构建真实的室内物体与场景三维模型,实现室内场景三维模型纹理映射。
2 实验分析
为验证利用激光点云数据提出的室内三维模型构建方法优越性与可行性,将室内场景作为三维模型构建的对象展开实验。基于手持式激光扫描仪采集原始点云数据,利用文中方法进行配准分割并完成室内物体的三维模型构建。
实验使用的计算机硬件配置如下:CPU为Intel Core i5 7300HQ,CPU主频2.50GHz,8GB内存。选取装饰画框、木桌、沙发、冰箱、橱柜5种室内物体作为三维模型构建对象,涉及家具、家电、装饰品三个类型,建模程序由简单到复杂,以客观评估三种方法重建三维模型的性能。
为突出文中方法的性能优势,引入基于迭代最近点的室内设计三维模型构建方法(方法1)、基于欧氏距离测度的室内设计三维模型构建方法(方法2)进行同步测试。
2.1 三维模型重建效果分析
图1展示了室内设计三维模型构建效果。

(a)原始点云 (b)三角网构建 (c)纹理映射重建模型
其中,图1(a)为采集的原始点云图像效果,具有纹理颜色信息;图1(b)为三角网构建效果,利用Delaunay三角剖分法构建了物体的三角网格,营造了点与点之间的拓扑关系形成了木桌模型的基本曲面,为重建木桌三维模型创造良好基础与条件。图1(c)为纹理映射重建效果,将原始点云的颜色信息映射到三维模型中,良好还原了木桌的真实形态。
2.2 三维模型构建性能分析
采集了室内物体的激光点云数据作为原始数据,统计了各方法点云数据配准与分割的时间开销,如表1所示;各方法重建三维模型的点云数据配准误差曲线见图2。

表1 点云数据配准/分割时间开销统计 (单位s)
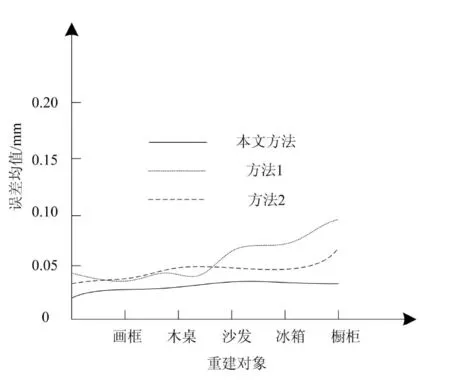
图2 点云配准误差均值统计
结合图2与表1可知,文中方法点云配准的误差最低、点云配准与分割的用时最短。方法1配准与分割室内物体点云数据的用时长且稳定性差,配准点云的误差较大,误差最大值逼近0.10mm;方法2配准与分割室内物体点云数据时间开销较少,但效率仍低于文中方法,在配准点云数据时误差远大于文中方法。可见,文中方法取得了良好的点云配准与分割效果,为重建室内物体三维模型创造了良好的数据条件。
3 结 论
通过研究激光点云数据的配准与分割来提高室内三维模型构建的精度,在测试环节本方法取得了理想的室内设计三维模型重建效果。具体而言,是因为本方法在激光点云数据配准环节基于自适应邻域实现,针对点对自适应邻域“片状”、“线状”两种不同情形采用了不同处理措施,提升了点云粗配准的精度。在点云数据分割方面应用了k-means聚类算法,无需大量先验知识即可实现,减少了数据处理的时间开销,提高了点云数据处理的效率。
猜你喜欢
大众文艺(2023年9期)2023-05-17
兰州文理学院学报(自然科学版)(2022年3期)2022-06-08
现代装饰(2020年12期)2021-01-18
吉林大学学报(理学版)(2020年3期)2020-05-29
中学生数理化·高一版(2020年1期)2020-02-20
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
自动化学报(2018年7期)2018-08-20
上海建材(2017年2期)2017-07-21
周口师范学院学报(2016年5期)2016-10-17
科普童话·百科探秘(2015年4期)2015-05-14
