北京地铁首都机场线车辆紧急制动安全监控装置的设计及验证
2024-02-23 00:38:52徐恭德马法运
城市轨道交通研究 2024年1期
徐恭德 刘 澳 盖 猛 马法运 苗 峰 崔 雷
(中车青岛四方车辆研究所有限公司, 266031, 青岛)
北京地铁首都机场线(以下简称“机场线”)采用地下线、地面线和高架线相结合的方式,具有线路坡度大,平面曲线半径小的特点。为适应机场线的线路特征和运营需求,选择了爬坡能力强、转弯半径小、噪声小的直线电机驱动车辆作为运营车辆[1-2]。
在城市轨道交通中,直线电机驱动的车辆占比少[3]。与传统轨道交通车辆相比,其牵引和制动过程不受轮轨黏着力的限制,具备更强的牵引和电制动能力。文献[4]将紧急制动分为多种模式,然后将直线电机的电制动用于其中一种紧急制动模式。该方案将电制动有效指令串入车辆电气控制回路,虽然实现了紧急制动过程的电-空气配合功能,但缺乏对整列列车的紧急制动性能评估,不能精确计算整列的电制动和空气制动的切换条件,没有充分利用整列列车的电制动能力。
为减小紧急制动过程中的摩擦副磨耗,并充分利用直线电机的电制动能力,机场线的车辆设置了紧急制动安全监控装置(以下简称“安全监控装置”)。安全监控装置采用两级紧急制动控制模式:行车过程中,当信号系统或司机触发紧急制动指令时,安全监控装置首先采用Ⅰ级紧急制动控制模式,并实时监控紧急制动性能;若Ⅰ级紧急制动控制模式的制动性能不能满足要求,则切换为Ⅱ级紧急制动控制模式,以确保制动安全。
1 控制原理
安全监控装置采用安全运算平台[5],并由列车低压供电母线直接供电。安全监控装置设置了安全数字量采集通道,采集EB(列车紧急制动)指令信号和EBS(子系统紧急制动)指令信号;设置4路速度传感器采集通道,冗余采集2个车轴的4路速度脉冲信号,计算车辆紧急制动时的运行状态;设置EBS输出通道,向车辆的牵引系统和制动系统发送EBS信号;设置BRS(制动释放信号)输出通道,通过硬线向TCMS(车辆控制管理系统)发送安全监控装置的控制状态,指示安全监控装置的紧急制动控制模式等级;设置BFS(制动故障信号)输出通道,通过硬线向TCMS发送运行状态信息,指示安全监控装置的运行状态是否正常。安全监控装置的接口如图1所示。
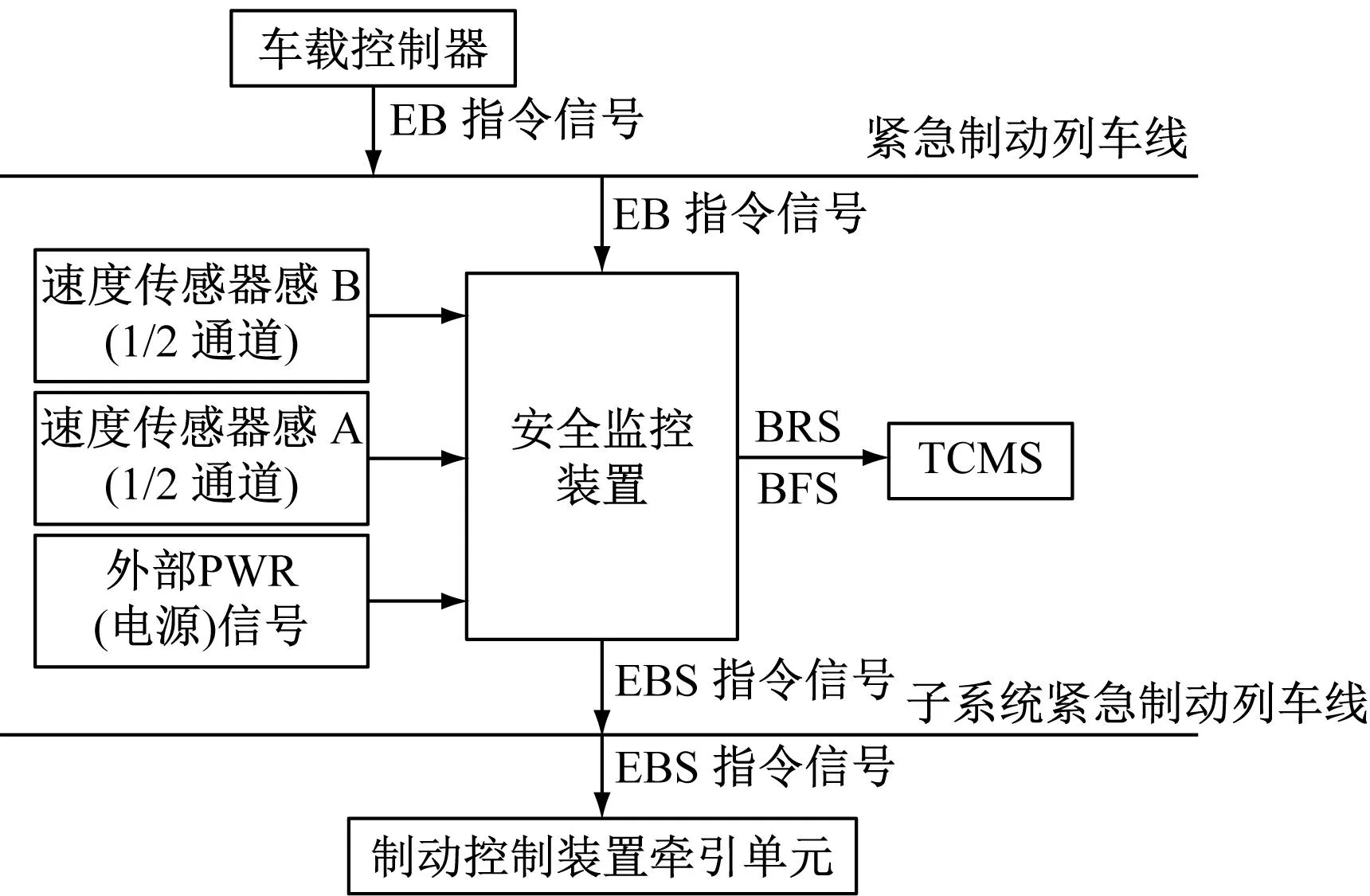
图1 安全监控装置接口
安全监控装置通过控制安全继电器的动作来实现切换紧急制动控制模式的等级。当车辆未紧急制动时,安全监控装置控制安全继电器Relay1失电,并通过Relay1的常闭触点使EBS输出通道与EB输入通道等电位连接,以保证EB指令和EBS指令的信号状态均为高电平。当车辆紧急制动时,安全监控装置控制安全继电器Relay1得电,并通过Relay1的常开触点使EBS输出通道连接至车辆低压控制母线PWR+(电源供电正极),保证EB信号为低高电平,EBS信号为高电平,控制安全监控装置进入Ⅰ级紧急制动控制模式。在Ⅰ级紧急制动控制模式期间,安全监控装置实时监控紧急制动性能;当车辆的紧急制动性能不满足要求时,安全监控装置控制安全继电器Relay1失电,通过安全继电器Relay1的常闭触点使EBS输出通道与EB输入通道恢复等电位连接,保证EB指令和EBS指令信号均为低电平,控制安全监控装置进入Ⅱ级紧急制动控制模式。安全监控装置紧急制动控制模式切换电路图如图2所示。
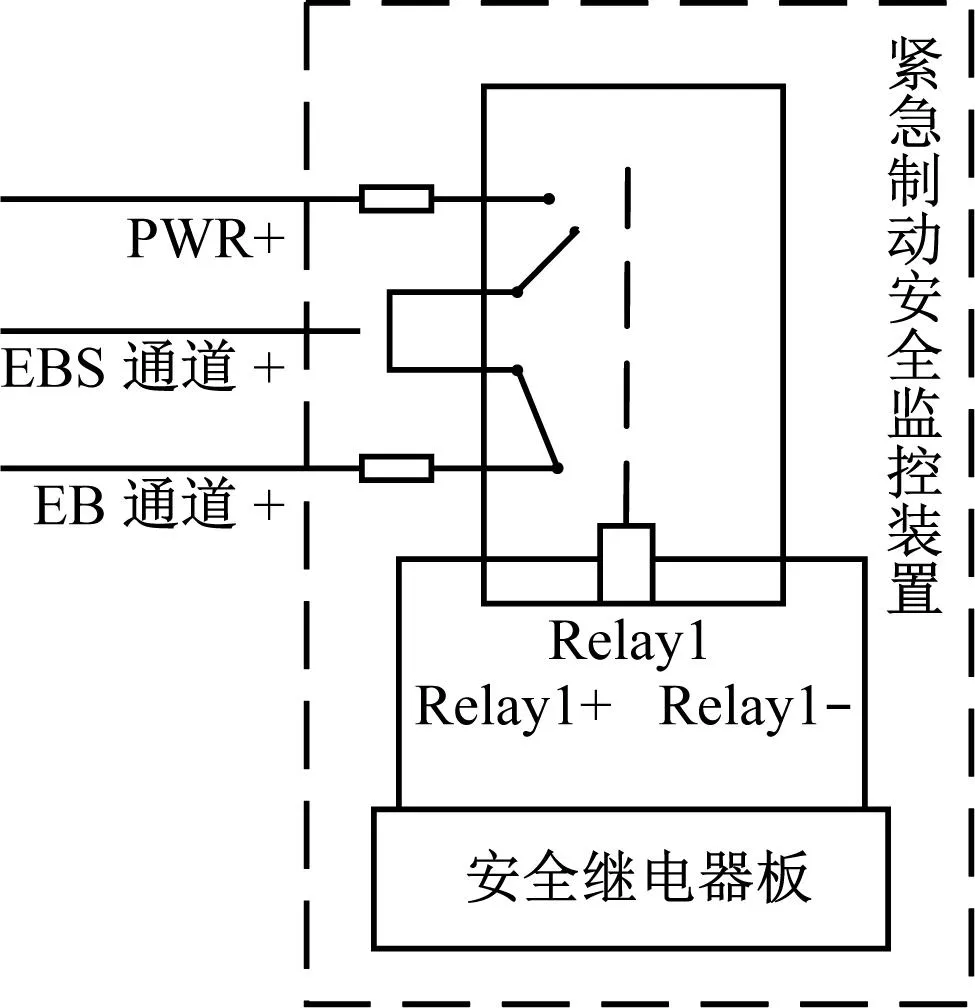
注:+为正极;-为负极。
Ⅰ级紧急制动控制模式是一种自恢复的、非安全的紧急模式。当车辆处于Ⅰ级紧急制动控制模式时,安全监控装置控制牵引系统施加电制动,控制制动系统施加磁轨制动。Ⅱ级紧急制动控制模式是一种不可恢复的、安全的制动控制模式。当Ⅰ级紧急制动控制模式下的制动性能不能满足制动要求,或者车辆速度已将至足够低时,安全监控装置切换至Ⅱ级紧急制动控制模式,控制制动系统施加液压摩擦制动及磁轨制动,并保持此模式至停车。
2 功能设计
在紧急制动过程中,为确保制动性能,安全监控装置实时计算Ⅰ级紧急制动控制模式与Ⅱ级紧急制动控制模式切换的制动性能临界状态,并将其作为判据;监测车辆的实际制动状态,并将判据与实际状态进行对比,进而判断出紧急制动的施加等级,控制紧急制动的两级切换。
因此,安全监控装置的功能设计主要包括:① 计算Ⅰ级紧急制动控制模式下的制动性能判据;② 监测车辆实际制动状态;③ 判断Ⅰ级紧急制动控制模式性能。
2.1 Ⅰ级紧急制动控制模式的制动性能判据计算
由于瞬时加速度表征车辆当前状态的紧急制动性能,制动距离表征车辆从紧急制动开始至当前阶段的紧急制动性能,因此安全监控装置采用瞬时加速度和制动距离双重指标作为Ⅰ级紧急制动控制模式下制动性能的判据。这样,一方面,能够及时判断当前工况的紧急制动性能是否不足,另一方面,在瞬时加速度满足要求但制动距离超标的极端特殊情况下,也能够保证制动距离的安全性。
Ⅰ级紧急制动控制模式下,车辆制动采用电制动和磁轨制动相结合的方式。电制动通过直线电机与轨道铝板之间的电磁作用产生制动力;磁轨制动通过车下的磁轨制动器吸附在钢轨上,产生滑动摩擦制动力。二者制动力的施加相互独立且不受轮轨黏着的限制,所以叠加两者的紧急制动性能曲线即可计算出Ⅰ级紧急制动控制模式的制动性能曲线。Ⅰ级紧急制动控制模式下瞬时制动加速度的制动性能曲线如图3所示。
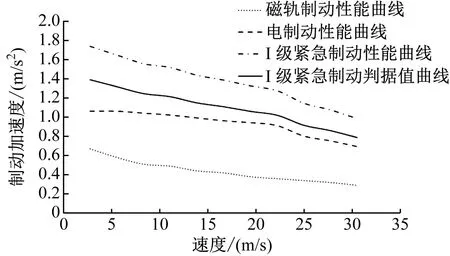
图3 Ⅰ级紧急制动控制模式下瞬时制动加速度的
根据图3,通过线性拟合的方法可得,Ⅰ级紧急制动控制模式下的速度与制动加速度线性关系为:
aL=-mv+n
(1)
式中:
aL——Ⅰ级紧急制动控制模式瞬时制动加速度理论值;
m——线性拟合方程的系数;
n——线性拟合方程的常数;
v——速度。
结合以下因素,暂定aL判据的容忍系数:
1) 在安全停车原则基础上尽量降低擦轮风险;
2) 在信号系统控制车辆时,车辆制动加速度应≥0.85 m/s2。
取制动加速度指标aJ=0.8aL作为Ⅰ级紧急制动控制模式下切换Ⅱ级紧急制动控制模式的实时判据。结合加速度的定义和式(1),可得:
(2)
式中:
aJ——Ⅰ级紧急制动控制模式瞬时制动加速度判据值;
t——紧急制动的时间。
求解式(2),可得:
(3)
式中:
C——微分方程解中的常数。
最后,通过对v积分即可求得,Ⅰ级紧急制动控制模式下作为切换紧急制动控制模式等级另一判据的制动距离SJ同v的关系:
(4)
2.2 车辆实际制动状态监测
安全监控装置通过计算每个周期内采集的脉冲数和对应的时间间隔,求出当前周期内的v。为提升v采集的准确性和可靠性,安全监控装置设置了4路速度采集通道,其中Axle1、 Axle2两个车轴的速度传感器分别有2路速度信号。通过横向对比,可以判断各轴采集的速度是否正常。Axle1、 Axle2两轴的速度信号相互冗余,当某轴的一路速度采集失效时,安全监控装置仍能通过另一路获取速度信号。为提升速度信号的稳定性,安全监控装置先通过软件对采集到的速度信号进行滤波处理。滤波算法为:
(5)
式中:
vg——第g路速度信号滤波后的速度值,g=1,2,3,4;
e——滤波缓存区总个数;
vgi——第i个采集周期内第g路通道采集的速度值;其中,i=1,2,…,e;
k——速度有效加权因数;滤波堆栈中的速度最大值和最小值的有效加权因数为零,其余加权因数为1。
在计算出vg后,安全监控装置按照制动速度取大的策略横向比较各路vg,最终计算出代表车辆速度的唯一有效速度vc。
安全监控装置根据4路速度信号的变化量及对应的处理周期计算4路加速度,然后采用与速度滤波相同的方式对加速度滤波。安全监控装置对各路滤波后的加速度取值,最终计算出车辆的唯一有效加速度。安全监控装置的加速度取值策略为:
(6)
式中:
ac——车辆唯一有效加速度;
aGi——第i个采集周期内第G路加速度的滤波值,G=1,2,3,4。
当安全监控装置采用Ⅰ级紧急制动控制模式后,开始计时,经过制动的响应时间后,对v积分,计算车辆的实际紧急制动距离S,即:
S=sum(vcTc)
(7)
式中:
S——车辆实际的制动距离;
Tc——vc对应的采集周期。
2.3 性能判断
在Ⅰ级紧急制动控制模式阶段,安全监控装置实时计算Ⅰ级紧急制动控制模式的制动性能判据指标,监测车辆的实际制动状态,并在数据判断缓存区内滑动比较两者数据。安全监控装置设置数据比较容忍界限,当S或者当前实际制动加速度a不满足模式切换要求时,相关标志位置位,并开始记录次数;当标志位的计数超过容忍界限后,安全监控装置控制安全继电器释放,EB指令和EBS指令的信号状态均保持低电平,紧急制动控制模式等级由Ⅰ级切换为Ⅱ级,至车辆完全停止。
3 试验验证
为了检验安全监控装置设计的正确性,也为了验证安全监控装置与车辆制动控制过程的适配性,在AW3(满载)工况下进行车辆紧急制动性能试验。
3.1 试验一
试验一中,先将车辆加速至40 km/h速度等级,在最大牵引位时,施加紧急制动,装置在车辆高速段时保持Ⅰ级紧急制动控制模式,不切换;当速度降至低速段时,装置切换至Ⅱ级紧急制动控制模式。试验一的安全监控装置控制过程曲线见图4。

图4 试验一的安全监控装置制动过程曲线
安全监控装置在速度达到A点时,接受到紧急制动指令,经过Δt1(150 ms)延时后,进入Ⅰ级紧急制动控制模式。当车辆速度达到峰值B点后开始减速。安全监控装置在C点开始计算aJ。在D点时开始计算S和SJ。当速度降至E点以下时,安全监控装置控制安全继电器失电,牵引系统退出电制动,制动系统补偿液压制动。图4中Ar2区域表明在车辆低速段时,紧急制动控制模式的切换导致车辆制动加速度抖动,完成紧急制动控制模式由Ⅰ级切换至Ⅱ级,并保持Ⅱ级紧急制动控制模式至停车(F点)。整个过程中,aJ曲线与a曲线的轮廓和趋势一致,验证了推导过程的合理性、准确性。
Experiment 1
在Ⅰ级紧急制动过程中,aJ的平均值为1.26 m/s2;在监控制动距离期间(DE段),SJ=56.4 m,D点的速度为12.05 m/s,E点的速度为1.44 m/s, 由监控制动距离推导出监控过程的平均制动加速度为1.27 m/s2监测的实际制动距离S为48.4 m;两平均制动加速度均满足信号系统对安全监控装置控制制动加速度的要求(≥0.85 m/s2),并且满足标准规范对地铁车辆紧急制动加速度的要求(1.0~2.5 m/s2)[6],验证了计算的安全性。
3.2 试验二
试验二中,先将车辆加速至40 km/h速度等级;在最大牵引位时,施加紧急制动;在车辆高速段时,由于制动性能不满足判据要求,安全监控装置切换进入Ⅱ级紧急制动控制模式。试验二的安全监控装置制动控制过程曲线如图5所示。

图5 试验二的安全监控装置制动过程曲线
当安全监控装置采用Ⅰ级紧急制动控制模式后,由于隔离了部分牵引控制装置,列车的电制动能力降低,导致a偏小,在制动力上升过程中(CD时间区段的Ar3区域),多次出现a 在整个制动过程中,S=45.4 m,略小于SJ(45.7 m);a平均值为1.29 m/s2,aJ的平均值为1.27 m/s2;在监控S期间(DE段),D点的速度为10.94 m/s,E点的速度为1.43 m/s,由S推导出监控过程的平均制动加速度为1.29 m/s2,实际制动加速度略大于aJ,说明车辆的实际紧急制动性能与相应指标判据值基本一致。 由试验结果可见,安全监控装置的监测和两级紧急制动控制模式的切换,保证了车辆的紧急制动性能。这验证了安全监控装置设计的正确性和有效性,也验证了安全监控装置与车辆制动控制过程的适配性。 基于机场线车辆的紧急制动需求,本文从其控制方法出发阐述了该装置两级紧急制动控制模式的切换方法。该装置在充分利用整列列车电制动性能的基础上,能降低摩擦制动损耗,保证车辆的制动性能和安全性。经过现场试验验证,该装置计算准确,动作可靠,其制动控制过程符合实际工程规律,可为车辆紧急制动控制的后续研究提供借鉴。3.3 验证结果
4 结语
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
当代水产(2022年6期)2022-06-29 01:12:20
汽车观察(2018年12期)2018-12-26 01:05:42
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
机电信息(2014年27期)2014-02-27 15:53:56